









Na montagem de robôs, modelos controlados pelo rádio, dispositivos mecatrônicos ou simples automatismos residenciais e industriais que usam motores, o principal problema que os leitores encontram é com a parte mecânica. Utilizando elementos comuns ou módulos de redução, a elaboração de projetos com motores fica facilitada, mas para isso é preciso conhecer alguns fatores que explicaremos nesse artigo.
Os pequenos motores de corrente contínua, alimentados por pilhas ou bateria, apresentam um inconveniente – possuem rotação elevada demais para a maioria das aplicações, e nestas rotações seu torque não é grande. Não devemos acoplar diretamente nos eixos dos motores rodas propulsoras e outros dispositivos para movimentar os modelos que queremos.
A única possibilidade que ainda existe para esse acoplamento direto é no caso de barcos e aviões onde a hélice realmente deve movimentar-se em regime de alta rotação e tanto a resistência do ar como da água não exigem um torque elevado.
Para a movimentação de modelos em terra ou estáticos como robôs, carros, mecanismos de um guindaste, ou mesmo de abertura de portas ou acionamento de mecanismos, temos que utilizar recursos adicionais.
A força que podemos obter de um pequeno motor depende tanto da sua potência como da redução de sua velocidade através de mecanismos Se dividirmos a velocidade por 10 teremos um aumento da força de igual proporção.
Assim, para que um pequeno motor movimente de maneira apropriada um modelo, por exemplo, um carrinho, devemos levar em conta este fator: diminuindo a velocidade teremos mais força.
Veja que ocorre com veículos “de verdade”, um carro, por exemplo, onde a primeira marcha não tem velocidade, mas sim força! Na quarta marcha temos velocidade mas não força. Isso é devido justamente às reduções obtidas na caixa de mudanças através de engrenagens.
Para a movimentação de modelos ou mecanismos precisamos de reduções que variam de 10 a 200 vezes ou mesmo mais. Isso pode ser conseguido de diversas formas. A maneira mais simples, e também mais acessível, é a que faz uso de um simples elástico e uma roda maior, conforme mostra a figura 1.
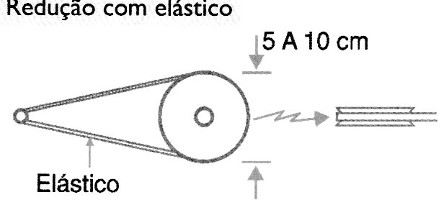
A roda maior (pode ser obtida de velhos equipamentos que tenham partes móveis, fora de uso) deve ter um sulco para a passagem do elástico, e a razão de redução depende justamente da relação entre o diâmetro da roda e o diâmetro do eixo do motor.
Podemos obter reduções na faixa de 20 a 200 vezes com este sistema simples. Na roda maior será então acoplado o dispositivo que desejamos movimentar.
Uma segunda maneira, que já exige a disponibilidade de peças especiais, uma montagem mais eficiente e mais compacta, é mostrada na figura 2.
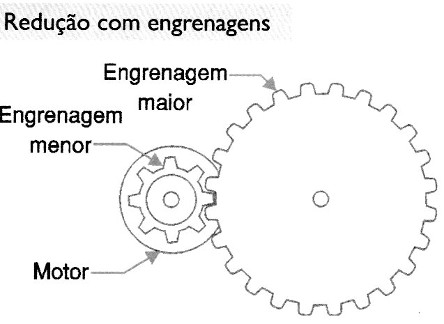
São usadas engrenagens que tanto podem ser de plástico (aproveitada de brinquedos) como de metal. A razão da redução é calculada pelo número de dentes da engrenagem. Assim, se a maior tiver 100 dentes e a menor 10, a redução será de 100 dividido por 10, ou seja, 10 vezes.
A vantagem deste sistema em relação ao elástico é que não ocorre a “derrapagem”, pois as engrenagens não escorregam. Se um par de engrenagens não for suficiente para se obter a redução desejada, deve-se utilizar o sistema da figura 3.
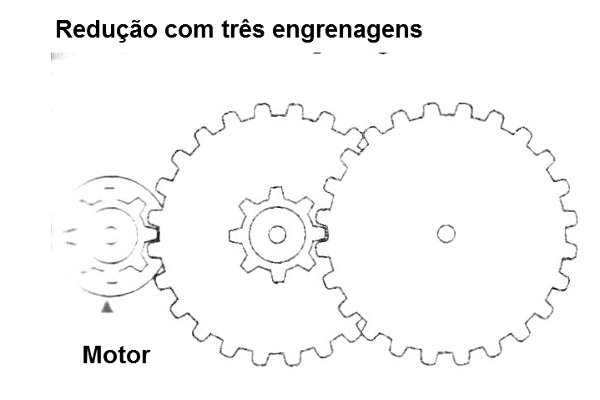
Neste caso, pode ir acoplando engrenagens sucessivamente, sendo este sistema muito usado nas chamadas caixas de redução, onde se exige muita redução e muita força. Cada redução multiplica a força e diminui a velocidade na mesma razão que o quociente dos dentes da engrenagem maior pela menor.
O acoplamento de um motor a uma roda propulsora é um outro problema que aflige muitos leitores que desejam fabricar seus modelos. Uma solução interessante e simples faz uso de elástico e duas rodas, conforme mostra a figura 4.
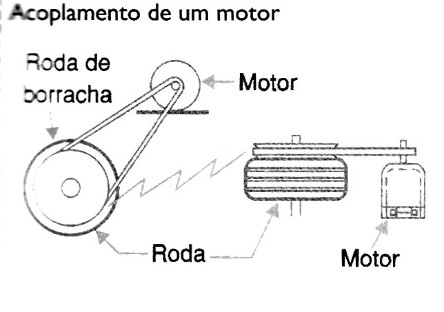
Uma roda menor é colada ou presa de modo firme a uma roda maior, de borracha, que é a propulsora. Na roda menor existe um sulco por onde passa o elástico que vai ao pequeno motor.
A roda menor pode ser feita com três folhas de plástico, CDs e outros materiais de fácil trabalho, sendo uma de menor diâmetro. Desta forma, temos um “sanduíche”em que a menor, no meio, forma o sulco para a passagem do elástico.
Em certas aplicações, como o controle de direção, é preciso que o sistema tenha a possibilidade de reverter rapidamente sua direção e isso em posições bem definidas. Isso pode ser conseguido tanto com a ajuda de “microswitches” como também de “reed switces”.
Os reed-switches são pequenos interruptores vedados com lâminas que podem ser acionados pelo campo magnético de um imã. Assim, se prendermos um imã no elemento que deve girar, a fixação dos reed-switches em pontos apropriados permite seu acionamento nas posições certas (figura 5).
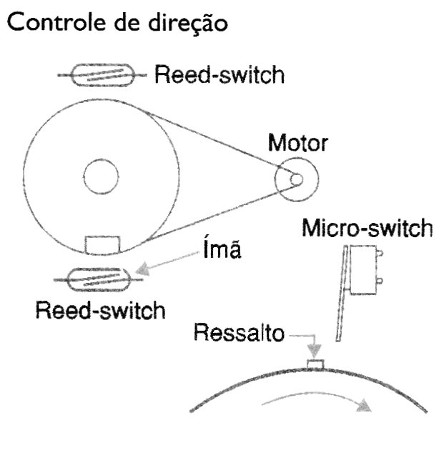
Nestas condições, o acionamento dos reed-switches pode ativar um relé de reversão da rotação do motor, O circuito para isso será dado mais adiante.
Já os microswitches são interruptores miniaturizados bem delicados que seriam fixados perto do elemento móvel é acionados por um ressalto.
A reversão de um motor de corrente contínua é feita de maneira muito simples: basta inverter a polaridade de sua alimentação. Um processo mecânico simples de fazer isso é através de uma chave de 2 pólos x 2 posições ou H, ligada conforme mostra a figura 6.
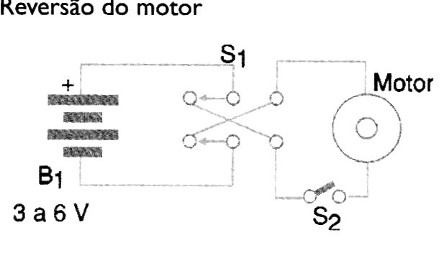
Com a chave n uma posição (S1) temos a movimentação do motor num sentido, e na outra ele inverte o sentido de rotação. A chave S2 serve para ligar e desligar. Um redutor com um carretel e este sistema pode resultar num projeto de um guindastes que sobe e desce mercadorias.
Redutores Comerciais
É claro que a disponibilidade de um sistema redutor eficiente e compacto pronto facilitará a construção de qualquer modelo. Na figura 7 temos um exemplo.

Na verdade, quando especificamos um motor de corrente contínua para 6 V, isso significa que, na verdade ele girará com tensões entre 4 e 6 V e até um pouco mais normalmente, apenas apresentando alterações de velocidade e torque.
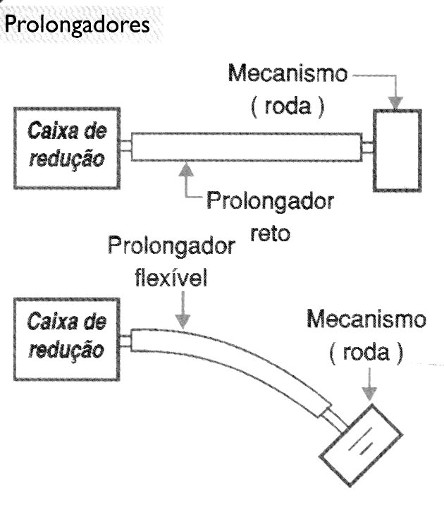
Esse redutor tem recursos que possibilitam sua fixação fácil, e o acesso ao eixo com velocidade reduzida pode ser feito de diversas maneiras. Para a transmissão a uma roda maior ou outro dispositivo podemos usar um prolongador, reto ou mesmo flexível,conforme mostra a figura 8.
Um circuito prático para controle deste motor é mostrado na figura 9. Este circuito permite a mudança de sentido de rotação com um simples pulso de controle.
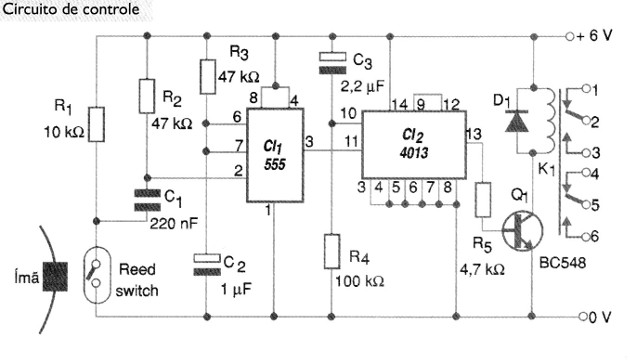
Quando o imã passa perto do reed-switch, um pulso é gerado disparando o circuito integrado 555 que funciona como um monoestável. O pulso de saída do 555 é então levado a partir do pino 3 ao pino 11 de um flip-flop com o circuito integrado 4013. Este flip-flop muda de estado. Se o relé estava desativado ele é ativado e vice-versa.
Ligando os contactos do relé a um motor, conforme mostra a figura 10, temos a inversão do sentido de rotação.
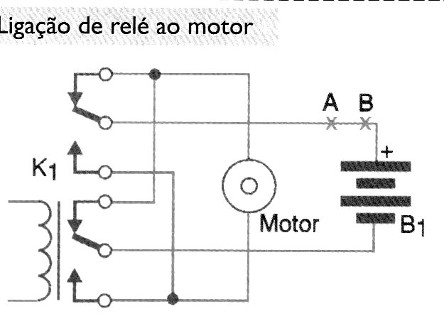
Veja então que podemos utilizar este circuito em conjunto com um sistema de controle para evitar que se atinja o fim de curso, quando então automaticamente o motor inverte sua rotação. Para abertura de portas, de sistemas de guindastes e controles diversos, este circuito é um recurso é importante.
Na figura 11 temos um controle eletrônico que também pode ser usado com o redutor para controlar sua velocidade numa certa faixa de valores.
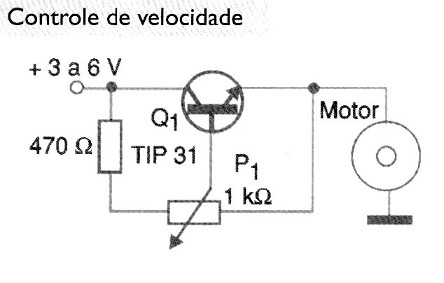
Trata-se de um simples reostato eletrônico, em que o potenciômetro controla a corrente do motor de zero até o ponto de máximo. Este dispositivo funciona com motores de 3 a 12 V com correntes até 1 A. O transistor deve ser dotado de um radiador de calor e o potenciômetro admite valores na faixa de 4k7 a 22k.
Utilização da Caixa de Redução
Algumas utilidades práticas para controle com o redutor daSaber Marketing são dadas a seguir, se bem que a imaginação do leitor deve trabalhar no sentido de conseguir variantes.
Na figura 12 temos um sistema de arame rígido para controle do leme de um barco. O pino fixado à roda do redutor deve estar distante do eixo numa relação que permita o movimento do leme em todo seu curso.
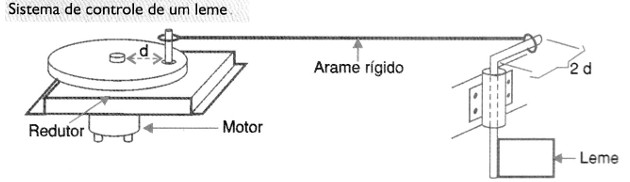
O sistema de conexão do arame ao eixo, para maior movimentação pode ser feito de diversas formas. Na figura 13 temos a utilização do sistema no controle de um carrinho, da maneira mais simples, movimentando todo o eixo dianteiro (o sistema tem bastante força para isso).
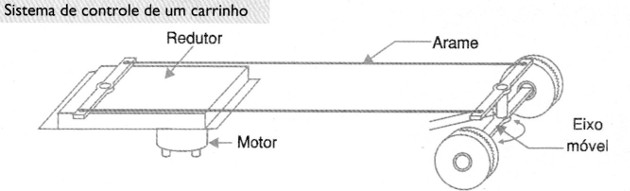
No caso, a haste que determina o ângulo de giro deve ter limitadores com microswitches para fazer a inversão de fim de curso, e o motor será ativado por controle remoto, com ou sem rfio. A atuação sobre as rodas de forma independente exige menos força.
Finalmente, na figura 14 temos um sistema “sem fim”que movimenta uma porca fixa no cursor de um potenciômetro para frente e para trás, conforme o sentido de rotação do motor.
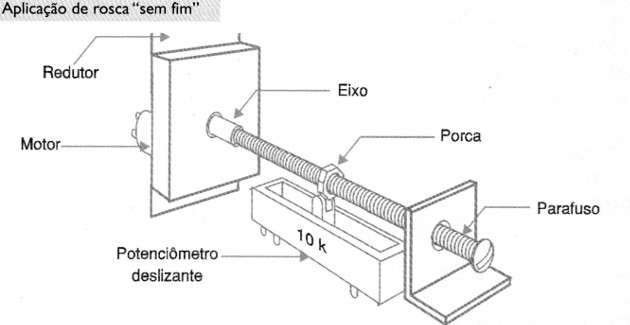
Uma aplicação interessante para este circuito é num controle remoto de volume ou intensidade de luz (dimmer), em que o potenciômetro está ligado ao circuito controlado. No fim do percurso da porca dvem ser colocados reed-switches ou micro-switches para fazer a reversão como no circuito proposto no decorrer do artigo.
Conclusão
A disponibilidade de redutores deste tipo e semelhantes pode gerar inúmeros projetos interessantes. Em diversos artigos que publicamos já abordamos essas aplicações.
Os leitores dotados de imaginação certamente não se limitarão ao que explicamos nesse artigo criando seus próprios projetos e se forem realmente bons, podem enviá-los à nossa redação pois eles podem resultar num interessante artigo.










