








Este artigo foi retirado do meu livro Robotics, Mechatronics and Artificial Intelligence (esgotado) publicado nos Estados Unidos e também de artigos anteriores em outras publicações, com pequenas atualizações (*). Ele mostra uma ponte H ideal para controlar motores DC e pode ser usada como um shield.

MEC203S
Esse circuito é a ponte H verdadeira ou completa e usa quatro transistores bipolares para fazer com que um motor de corrente contínua avance e retorne. O bloco completo é mostrado na Figura 1.
A sensibilidade depende dos transistores usados no circuito. Para o par BD135 / 136, motores até 1 A podem ser controlados. O ganho do transistor possibilita o controle de fontes de corrente de aproximadamente 5 mA ou menos.
Usando o TIP31 e o TIP32, como o ganho é menor, você precisará de mais corrente para controlar um motor de 1 A. Em alguns casos, o valor do resistor deve ser reduzido para 470 ohms. Sugerimos que o leitor experimente com o resistor para encontrar o melhor valor para a aplicação.
Para aplicações como blindagem, os valores são ideais e a fonte de alimentação pode ser separada para o microcontrolador.
Os valores indicados (1 kohms para R1 e R2) são adequados quando a fonte do sinal é um circuito lógico TTL ou CMOS.
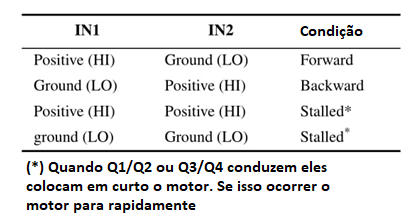
A tabela a seguir fornece a lógica de controle para este bloco:
As tabelas apresentadas nos artigos anteriores deste site são válidas ao utilizar o transistor NPN e PNP, de acordo com a corrente drenada pelo motor. Dependendo do motor, um capacitor também é necessário em paralelo, e o transistor deve ser alterado para alcançar a operação correta.











