Um dos shields de maior importância nos projetos de automação e robótica que utilizam microcontroladores é a ponte H. Através dela podemos controlar o sentido de rotação e a velocidade de motores de corrente contínua a partir de microcontroladores. Existem muitas configurações possíveis. Selecionamos algumas de nosso enorme acervo que está espalhado pelo site e em nossas publicações.
No nosso artigo “Conheça as Pontes H” (MEC068) detalhamos o funcionamento desses circuitos explicando como funciona e dando uma certa quantidade de circuitos práticos, mas existem muitos mais.
Assim, se o leitor ainda não conhece muito bem estes circuitos e pretende usá-lo no seu próximo projeto envolvendo um Arduino, PIC ou microcontrolador, sugerimos que antes dê uma olhada nele.
Depois, volte a este artigo fazendo a escolha de melhor configuração para seu projeto.
Shield Ponte H Para controle de Motores DC
Este circuito foi obtido numa documentação americana sobre motores. O circuito admite transistores equivalentes de acordo com a potência do motor controlado. A tensão do motor não precisa ser a mesma que alimenta a lógica de controle o que possibilita seu uso com microcontroladores.
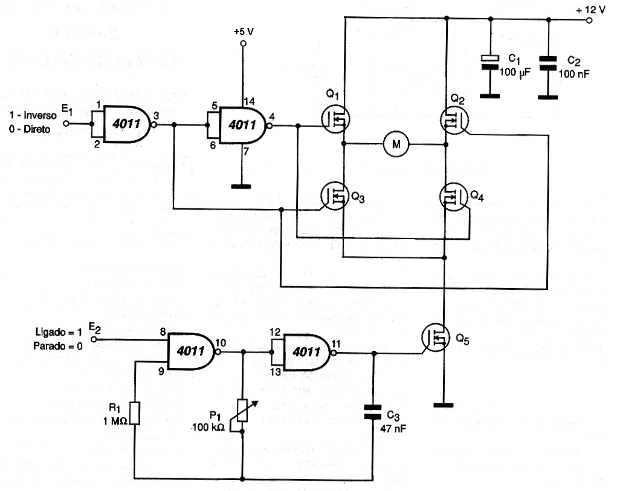
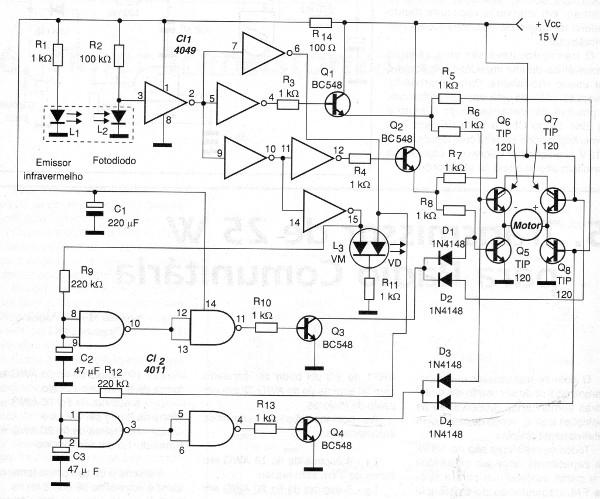
Shield Usando Ponte H com Controle PWM Manual
Este Shield para controle de motor com ponte H tem um circuito adicional disparo para controle PWM. Este controle é manual em princípio, feito por um potenciômetro, mas pode ser usado um sensor resistivo que então determinará a velocidade do motor. Num robô que segue a luz, por exemplo, usando como um sensor um LDR podemos obter a aceleração quando a fonte de luz é localizada. O circuito deve operar com 5 V, pois com tensões menores para o CI o disparo do MOSFET pode ser problemático. Qualquer MOSFET de potência pode ser usado.
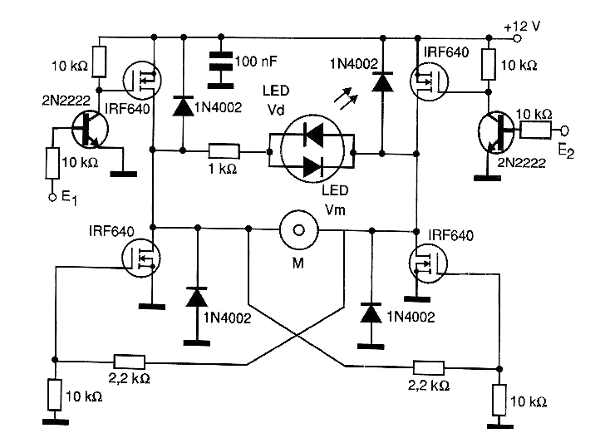
Shield de Ponte H completa com MOSFETs e Indicador de Direção
Esta ponte completa possui como recurso adicional dois LEDs que indicam o sentido de rotação do motor controlado. A ponte faz uso de MOSFETs de potência devendo ser escolhidos tipos de acordo com a corrente do motor controlado. Estes transistores devem ser dotados de dissipadores de calor. A ponte pode ser controlada tanto por sinais de 3 como de 5 V e a situação 11 é proibida.
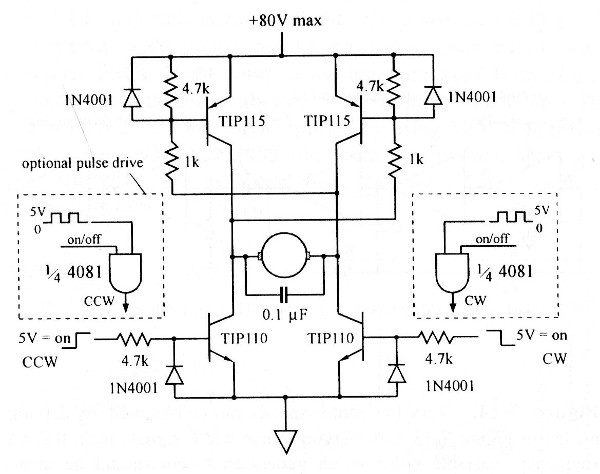
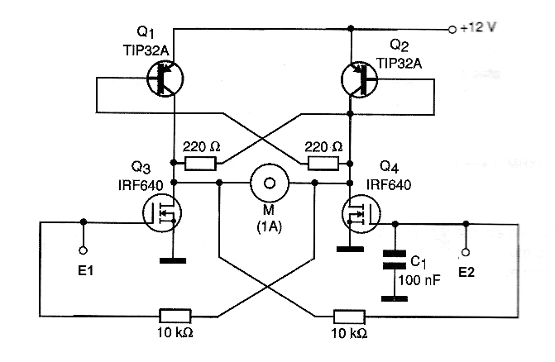
Ponte H Biestável
Este Shield comuta o sentido de rotação de um motor a partir de pulsos de 5 V ou mais aplicados às entradas E1 e E2, funcionando como um Flip-Flop de potência com ponte H. Os transistores devem ser dotados de dissipadores de calor. Dependendo dos MOSFETs usados pode ser necessário elevar a amplitude dos pulsos através de um Shield adicional (amplificador) para se obter a comutação eficiente. A fonte para o motor deve ser separada.
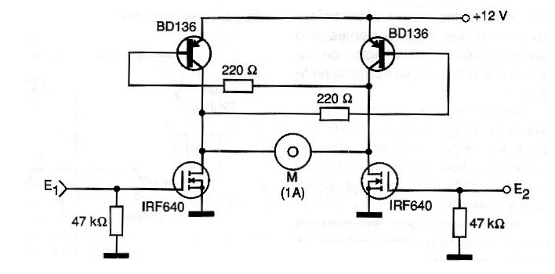
Ponte H com MOSFET de Potência e Bipolar
Este Shield misto pode controlar motores até 1 A e com a troca do BD136 até mais. Os transistores devem ser dotados de radiadores de calor e o controle deve ser feito pelas saídas de 5 V do Arduino, já que os MOSFETs podem ter dificuldade de comutação com tensões mais baixas. Em alguns casos pode-se até usar um Shield intermediário de disparo para elevar a tensão nos MOSFETs e assim ser obtida melhor comutação.
Ponte H simples
O sentido de rotação do motor M pode ser controlado por um Arduino ou outro microcontrolador através desta ponte H. Os níveis 00 mantém o motor parado enquanto que 01 e 10 determinam a rotação nos dois sentidos possíveis. A saída 11 é proibida pois faz com que os transistores conduzam ao mesmo tempo, levando o circuito a um curto circuito. As saídas podem ser moduladas para se obter o controle PWM de velocidade no sentido desejado.
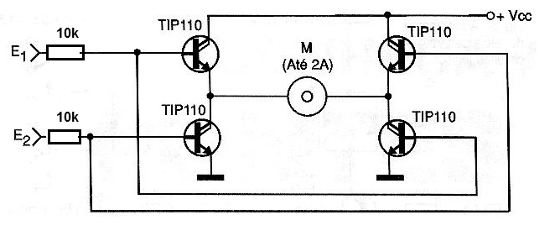
Ponte H Com Darlington
Uma ponte de maior sensibilidade e, portanto, menor consumo para as saídas do microcontrolador é a mostrada a seguir, fazendo uso de transistores Darlington. Esta ponte tem 4 estados possíveis, 00 para o motor parado, 01 e 10 para os dois sentidos de rotação e o estado proibido 11 que leva todos os transistores à condução e com isso uma situação de curto-circuito. Os transistores devem ser dotados de dissipadores de calor. A alimentação separada para os motores pode ficar entre 3 e 15 V.
Ponte H com Lógica
Este circuito tem apenas dois estados possíveis 1 ou 0 na entrada, com o motor girando num sentido ou outro. Para parar ou lugar deve ser usado um comando adicional, por exemplo, com relé ou transistor em série com a alimentação. A alimentação do circuito integrado deve ser feita com a mesma tensão da saída usada no microcontrolador. Os transistores devem ser dotados de dissipadores de calor. Transistores equivalentes de maior corrente como os TIP31 podem ser usados.
Reversor Digital Para Motores DC
Este circuito, que também pode ser adaptado para funcionar como shield de microcontroladores, é de uma documentação de 2003. A corrente máxima do motor controlado depende dos transistores, e no caso é da ordem de 1,5 A. Outros Darlingtons da série TIP podem ser usados para controlar correntes maiores. Os transistores da ponte H devem ser montados em dissipadores de calor.
PONTE H COM MOSFETs DE POTÊNCIA MIN393S
O circuito apresentado na figura 1 possibilita o controle de motores de corrente contínua de vários ampères a partir de sinais lógicos CMOS.
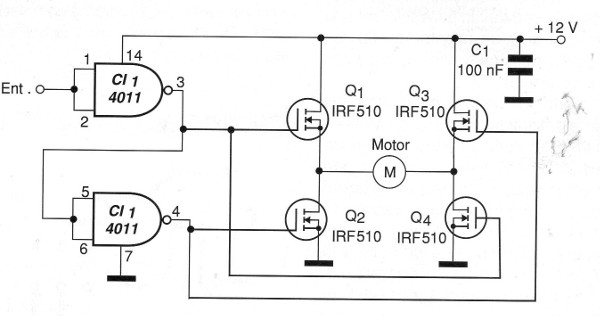
Duas das portas de um circuito integrado 4011 são usadas como inversores. Elas são ligadas de tal forma que, quando uma se encontra com a saída no nível alto a outra, obrigatoriamente se encontra com a saída no nível baixo.
Dessa forma, os transistores de efeito de campo de potência que formam a ponte H conduzem dois a dois estabelecendo sentidos diferentes de circulação da corrente através do motor. Com o nível alto na entrada o motor gira num sentido e com o nível baixo no sentido oposto.
A corrente máxima do motor controlado depende apenas dos transistores escolhidos.
A alimentação pode ser feita com tensões diferentes de 12 V, conforme o motor empregado. Com tensões abaixo de 9 V, a resistência entre o dreno e a fonte dos transistores começa a se tornar sensível nas perdas para o motor.
Eventualmente pode ser necessário ligar em paralelo com o motor um capacitor de 1 a 10 uF (despolarizado) para se evitar instabilidades causadas pela comutação de suas escovas.
Na figura abaixo temos uma sugestão de placa de circuito impresso para esta montagem.

Observe que, dependendo da intensidade da corrente exigida pelo motor, os transistores devem ser dotados de radiadores de calor apropriados.
CI-1 – 4011 – circuito integrado CMOS
Q1 a Q4 – IRF510 ou qualquer MOSFET de potência de canal N
C1 – 100 nF – capacitor cerâmico
M – motor
Diversos:
Placa de circuito impresso, radiadores de calor para os transistores, fios, solda, etc.
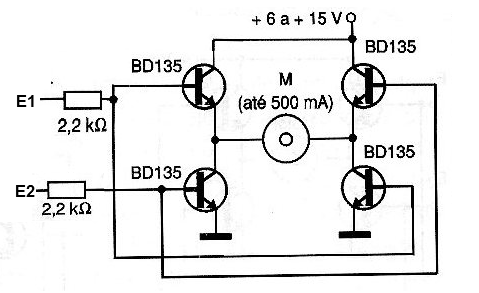
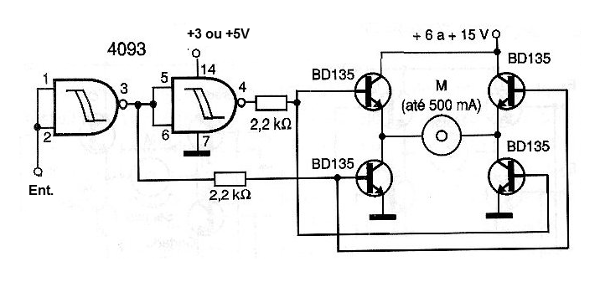
Ponte H com Realimentação
Este circuito com feedback para controle de sentido de rotação motores DC até 500 mA com os BD135/6 e 3 A com os TIP31/2 foi obtido no meu livro Robotics, Mechatronics and Artificial Intelligence, publicado nos Estados Unidos. Os níveis alto e baixo, baixo e alto nas entradas determinam a rotação dos motores. Não devem ser aplicados níveis altos simultaneamente nas entradas. Motores de 3 a 15 V podem ser controlados por este circuito. Os níveis de controle nas entradas devem ser complementares, ou seja, 01 e 10.