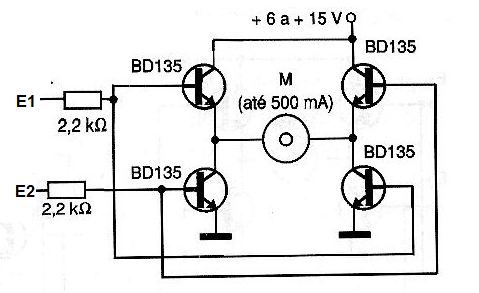
O sentido de rotação do motor M pode ser controlado por um Arduino ou outro microcontrolador através desta ponte H. Os níveis 00 mantém o motor parado enquanto que 01 e 10 determinam a rotação nos dois sentidos possíveis. A saída 11 é proibida pois faz com que os transistores conduzam ao mesmo tempo, levando o circuito a um curto circuito. As saídas podem ser moduladas para se obter o controle PWM de velocidade no sentido desejado.