Usando Sensores e Outros Modos de Acionamento
Os circuitos de maior sensibilidade que vimos neste artigo admitem a substituição dos potenciômetros de maior valor por sensores resistivos de mesma resistência. Isso significa que alguns destes circuitos podem ser usados como controles de motores a partir de sinais luminosos usando como sensores LDRs ou a partir de sensores térmicos (NTCs).
Também podem ser usados sensores de pressão ou de posição, desde que a informação enviada ao circuito seja na forma de uma resistência variável. Na figura 22 damos um exemplo de um controle de potência por intensidade luminosa de ação positiva.
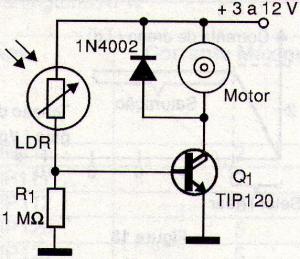
Figura 22 – Controlando a velocidade de um motor pela luz.
Neste controle, como a resistência do LDR diminui com a intensidade de luz incidente, a corrente no motor aumenta e com isso sua velocidade. Podemos ter um controle negativo usando a configuração mostrada na figura 23.
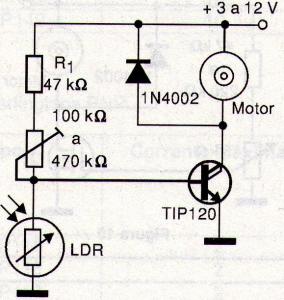
Figura 23 – Controle inverso de um motor pela luz. A sobra atua sobre o sensor.
Neste circuito, a corrente no motor diminui quando a intensidade da luz incidente no sensor aumenta. Os dois circuitos podem servir de base para controles de movimento de robôs baseados na presença de luz. Usando o circuito da figura 2, por exemplo, o robô diminui sua velocidade ao se aproximar de uma parede iluminada ou de uma fonte de luz qualquer. A idéia de um robô que tenha fotofobia (medo da luz) é algo que pode ser implementada facilmente com este circuito. Agregando-se um circuito de memória, pode-se combinar esse circuito e com isso obter-se uma certa “inteligência” para o robô, capaz de memorizar fontes de luz. Uma idéia para o uso dos circuitos que analisamos com outros modos de acionamento é a montagem de potenciômetros deslizantes ou mesmo rotativos em pedais, conforme mostra a figura 24.
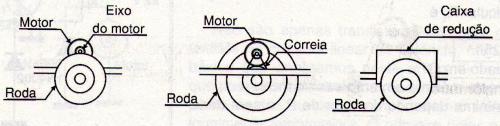
Figura 24 – Uso de potenciômetros como sensores.
Com as configurações mostradas nesta figura é possível controlar a velocidade de pequenos motores de corrente contínua usando os pés.
Inércia
Um dos problemas que os controles lineares de velocidade apresentam quando operam com motores de corrente contínua está na inércia. Os motores quando alimentados com uma tensão que cresce linearmente a partir de zero, conforme mostra o gráfico da figura 25 não partem imediatamente e nem mantém uma velocidade que acompanha linearmente as variações da tensão.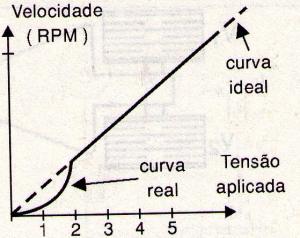
Figura 25 – Efeito da inércia num controle de motor.
Atuando sobre o controle (potenciômetro) de um circuito linear, o motor não parte imediatamente. É preciso ir girando o controle até que em determinado momento, o motor consiga vencer a inércia e com isso partir já com uma certa velocidade. Num veículo ou robô que use este motor como propulsão isso significa que dificilmente se consegue uma partida suave usando um controle linear. Ele parte aos "soquinhos" ou “dá um tranco” e logo deslancha o que dificulta um pouco o uso destes circuitos num controle de movimento que exija precisão e torque constante. No controle de outros automatismos, essa possibilidade de não se ter precisão de controle nas baixas rotações pode ser um sério inconveniente para o projeto. Para termos uma melhor precisão e torque mais constante em baixas velocidades existem outras técnicas, como por exemplo a que faz uso de Modulação de Largura de Pulsos ou PWM que será justamente o assunto em outro artigo desta série.
Projetos Práticos
Os projetos dados a seguir são apenas sugestões simples que implementam os controles que estudamos nesta lição. Evidentemente, os leitores podem ir muito além, dependendo apenas do grau de conhecimentos que já possuam. Muitas delas são importantes pelo aspecto didático já que podem ensinar na prática o que aprendemos com este artigo.
Base de Robô
Para o leitor que deseja por em prática o que vimos nesta lição, nossa sugestão é um robô ou veículo dirigido por fio com controle diferencial.
O que vamos fazer é uma base com dois motores e dois sistemas de redução que ficam a cargo do leitor podendo ser usadas caixas de redução, acoplamento direto do eixo do motor na roda ou correia, um de cada lado, conforme mostra a figura 26.
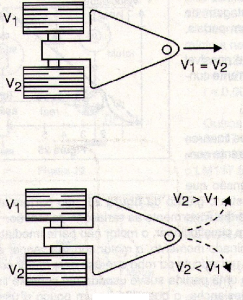
Figura 26 – Dois motores possibilitam a movimentação da base robótica em qualquer direção.
Quando atuamos sobre os dois controles dos motores podemos fazer com que eles rodem com a mesma velocidade e com isso o veículo se move em linha reta. Atuando sobre um ou outro potenciômetro de modo a aumentar ou diminuir a velocidade do motor correspondente podemos fazer o veículo ir para a direita ou esquerda, conforme mostrou a figura 26. O circuito para o controle é dado na figura 27.
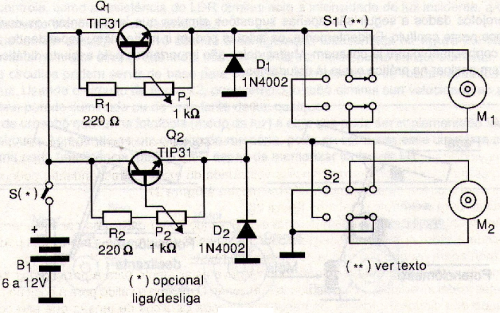
Figura 27 – Circuito completo de controle de direção e velocidade utilizando dois transistores e duas chaves reversíveis.
Na figura 28 temos a montagem do controle usando como base uma ponte de terminais que consiste numa alternativa econômica ideal para iniciantes. Os leitores mais avançados podem fazer a mesma montagem usando uma placa de circuito impresso.
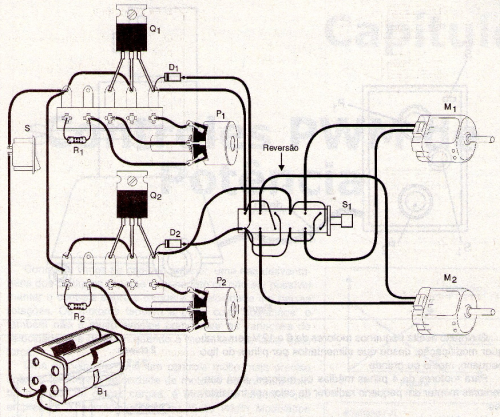
Figura 28 – Montagem do controle utilizando pontes de terminais para os transistores.
Na montagem em ponte de terminais o leitor deve estar atento para a posição dos transistores, pois se eles forem invertidos o circuito não vai funcionar. O mesmo é válido para a posição dos diodos. A finalidade dos diodos é proteger os transistores contra os picos de tensão que são gerados nas escovas dos motores quando eles funcionam. O circuito aceita pequenos motores de 6 a 12 V sem qualquer modificação desde que alimentados por pilhas do tipo pequeno, médio ou grande. Para motores de 4 pilhas médias ou maiores será conveniente montar um pequeno radiador de calor nos transistores.
Uma idéia interessante para um controle manual do veículo consiste em se usar uma caixinha com o circuito adicional de reversão de polaridade que permite ir para frente e para trás, conforme mostra a figura 29.
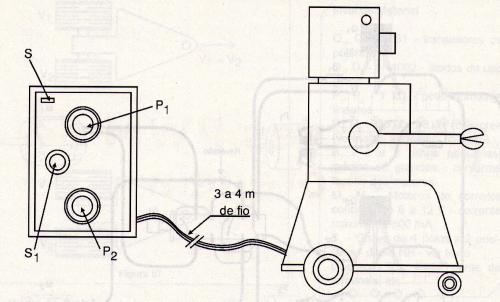
Figura 29 – Sugestão de projeto de robô controlado com o circuito descrito.
O circuito de reversão de polaridade que faz a base móvel ir para frente e para trás é obtido com uma chave dupla HH . Se esta chave não for conseguida com facilidade no mercado de componentes eletrônicos, podemos adaptá-la usando duas chaves de 2 pólos x 2 posições comuns, colando nos seus elementos de acionamento um pedaço de plástico ou madeira de modo que elas possam ser ligadas ao mesmo tempo.
Sugestão: que tal elaborar um robô de combate com base nesta configuração!
Lista de Material
Q1, Q2 -TIP31 - transistores de potência
D1, D2 - 1N4002 - diodos de uso geral
P1, P2 - 1 k ohms - potenciômetros lineares
R1, R2 - 220 ohms x 1/8 W - resistores (vermelho, vermelho, marrom)
B1 - 4 a 8 pilhas pequenas, médias ou grandes - conforme tensão dos motores
M1, M2 - Motores de corrente contínua de 6 a 12 V - corrente máxima de 500 mA
S1 - Chave de 4 pólos x 2 posições - dupla HH - ver texto
Diversos: fios, solda, ponte de terminais, etc.