









Podemos escolher entre diferentes sensores no mercado para medir todos os tipos de fenômenos naturais. Este artigo classifica e compara os sensores mais comuns para medição de sete desses fenômenos para ajudá-lo a escolher a melhor opção para a sua aplicação.
Guilherme Kenji Yamamoto e Renan Machado de Azevedo - National Instruments
Nota: Artigo publicado na Revista Saber Eletrônica 469 de abril de 2013.
Temperatura
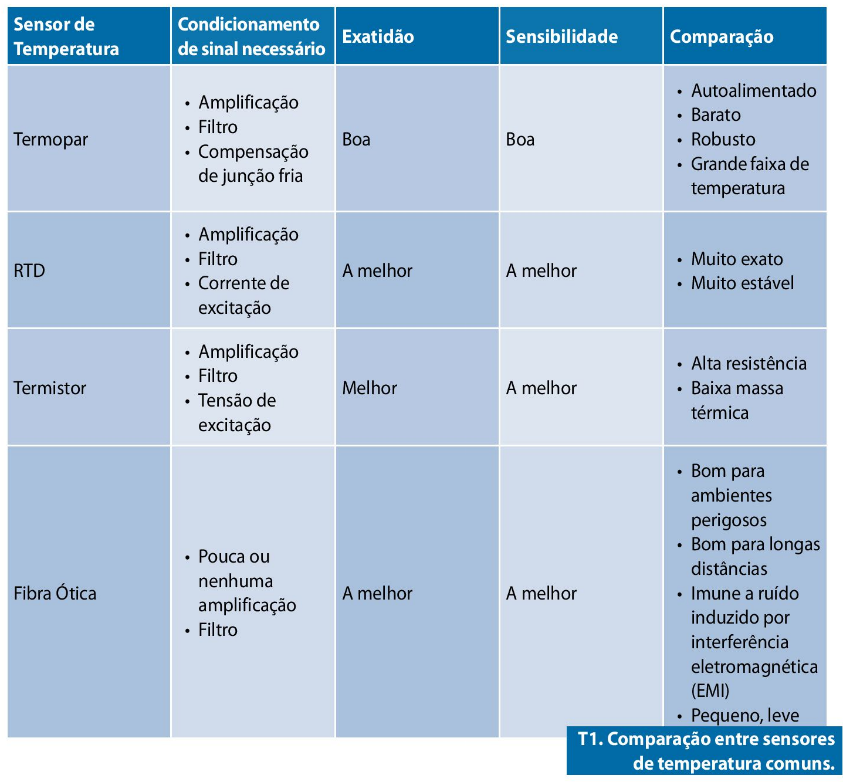
Os sensores mais comuns para medição de temperatura são os termopares, os termistores e os detectores de temperatura por resistência (RTDs). Sensores de fibra óptica, embora mais específicos, estão crescendo em popularidade para medições de temperatura. Observe a tabela 1.
Termopares
Termopares, os sensores de temperatura mais populares, são eficazes em aplicações que requerem uma ampla faixa de temperatura. Eles são baratos (R$8 a R$200) e possuem um tempo de resposta de frações de segundo. Devido às propriedades do material, entre outros fatores, pode ser difícil atingir uma exatidão de temperatura menor que 1°C.
RTDs
Os RTDs são quase tão populares quanto os termopares e podem manter uma leitura estável de temperatura por anos. Diferentes dos termopares, os RTDs possuem uma faixa de temperatura menor (-200 até 500 °C), eles requerem corrente de excitação e possuem um tempo de resposta mais demorado (2,5 até 10 s). Utiliza-se RTDs principalmente para medições exatas de temperatura (±1,9 por cento) em aplicações em que o tempo não é crucial. O custo pode variar.
Termistores
Termistores possuem uma faixa de temperatura menor (-90 até 130 °C) do que os sensores mencionados anteriormente. Eles possuem a melhor exatidão (±0,05 °C), porém são mais frágeis que os termopares ou os RTDs. Requerem ainda, excitação como o RTD, mas trata-se de uma tensão ao invés de uma corrente de excitação.
Fibra óptica
Outra alternativa é o uso da fibra ótica para medição de temperatura. Sensores de temperatura de fibra óptica são eficazes para ambientes perigosos, ou onde normalmente haja interferência eletromagnética. Eles são imunes a ruídos induzidos por interferência eletromagnética (EMI), não condutores, eletricamente passivos e capazes de transmitir dados por longas distâncias com pouca ou nenhuma perda na integridade do sinal.
Deformação
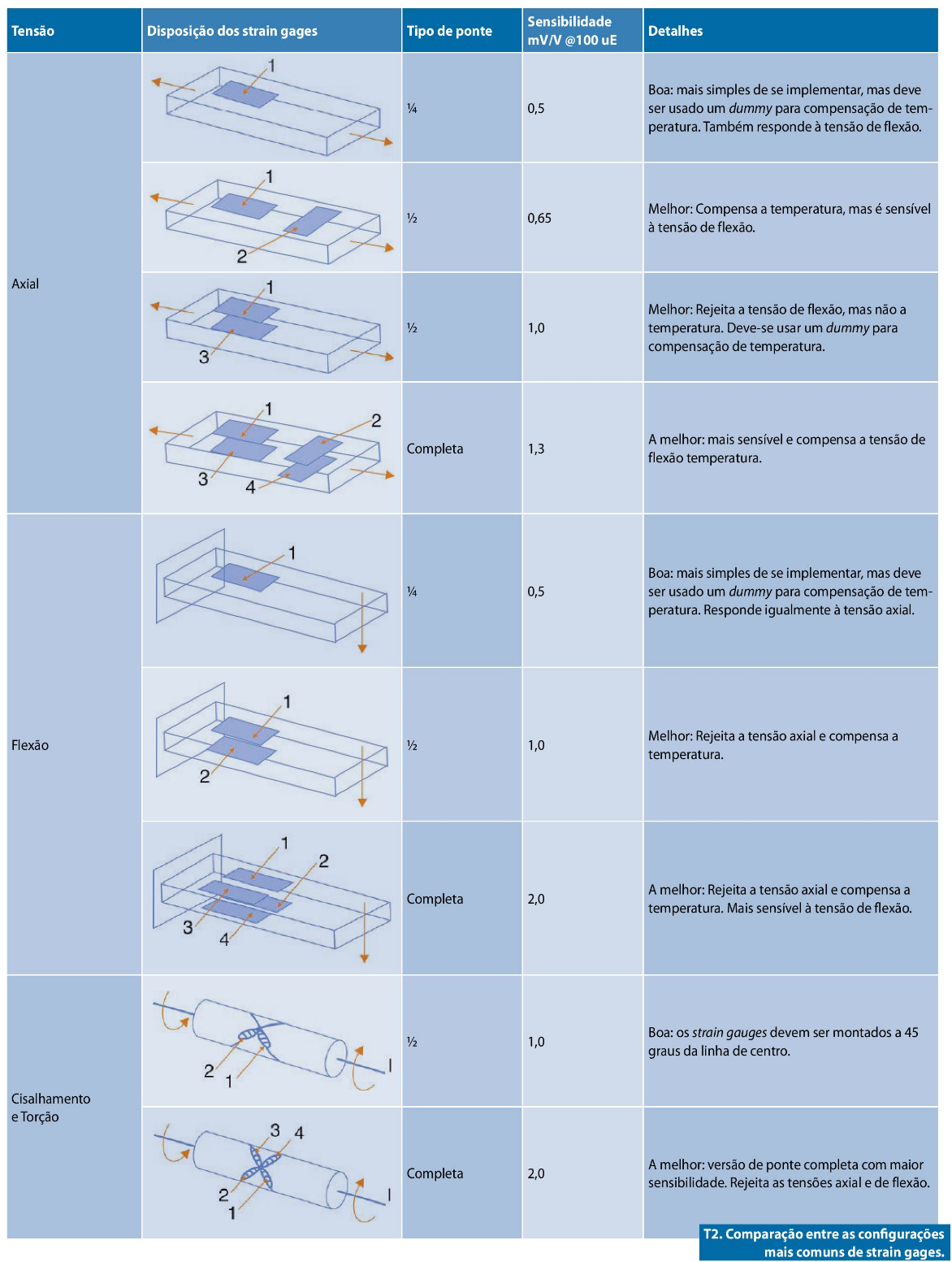
Normalmente, a deformação é medida por um strain gage resistivo. Esses resistores planos são geralmente fixados na superfície onde se espera que haja tração ou compressão. Os strain gages podem medir torções, trações e compressões muito pequenas em superfícies, e quando mais de um desses são ligados entre si, cria-se uma ponte. Um caso onde são utilizados strain gages resistivos é no teste estrutural de asas de aviões.
É possível fazer uma medição mais sensível com a aplicação de mais strain gages. Você pode usar até quatro dispositivos ativos para construir um circuito "ponte de Wheatstone", denominado configuração de ponte completa. Há também configurações de meia ponte (dois strain gages ativos) e quarto de ponte (um strain gage ativo). Quantos mais desses dispositivos ativos você utilizar, mais precisas serão as suas leituras.
Os strain gages demandam corrente ou tensão de excitação, e são suscetíveis a desvios de temperatura, tensão de flexão e tensão axial, o que pode resultar em leituras equivocadas sem o uso de strain gages resistivos adicionais:
• Pontes axiais medem o alongamento ou separação de um material;
• Pontes de flexão medem o alongamento em um lado de um material, ou a contração no lado oposto;
• Pontes de torção e cisalhamento medem a torção de um material.
Mede-se deformação em unidades adimensionais (e ou e), o que é equivalente a uma pequena variação no comprimento dividida pelo comprimento total do objeto sob medição. Similar aos sistemas de temperatura, os sensores de fibra óptica podem ser utilizados para medição de deformação em ambientes perigosos, onde uma medição elétrica comum poderia ser comprometida por uma interferência eletromagnética. Sensores de deformação de fibra óptica são imunes a ruídos induzidos por EMI, não condutores, eletricamente passivos e capazes de transmitir dados por longas distâncias com pouca ou nenhuma perda na integridade do sinal. Atente para a tabela 2.
Som
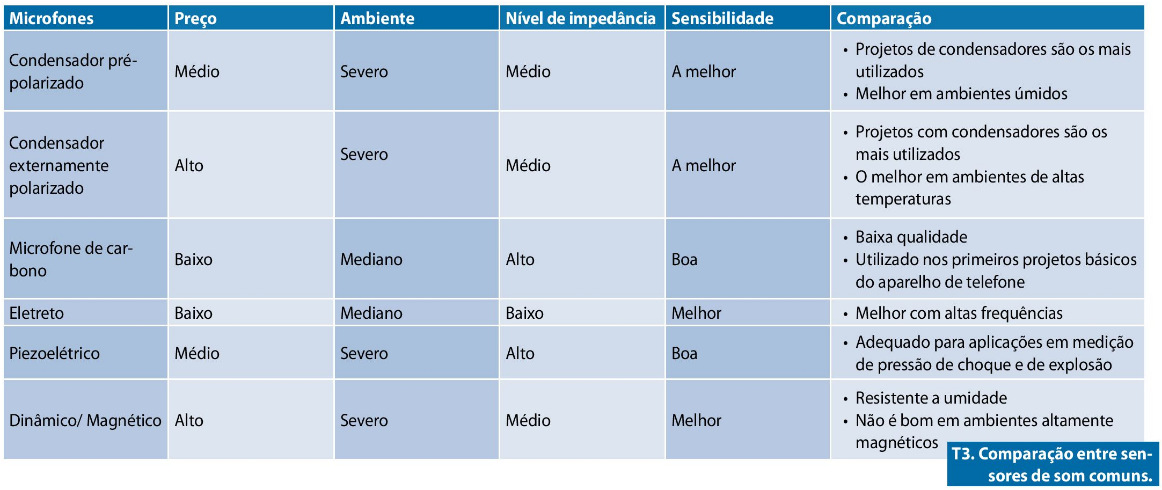
Microfones são utilizados para medir som, porém, você dispõe de muitos tipos diferentes de microfones para a escolha de um sensor em uma determinada aplicação. Veja a tabela 3.
Microfones condensadores
Microfones condensadores são os mais comuns. Eles podem vir pré-polarizados (isso significa que uma fonte de alimentação está incluída dentro do microfone) ou externamente polarizados, quando requerem uma fonte de alimentação adicional, o que soma custos ao projeto. Microfones pré-polarizados têm preferência em ambientes úmidos, em que os componentes de uma fonte de alimentação podem ser danificados, já os microfones condensadores externamente polarizados têm preferência em ambientes de temperatura elevada.
Microfones piezoelétricos
Microfones piezoelétricos robustos são utilizados em aplicações de medição de pressão de choque e de explosão. Esses microfones duráveis podem medir faixas de pressão de alta amplitude (decibéis). A desvantagem que eles trazem são os elevados níveis de ruído que captam.
Microfones dinâmicos/magnéticos
Assim como o microfone piezoelétrico, os microfones dinâmicos ou magnéticos funcionam em ambientes severos. Eles dependem do movimento para induzir magneticamente uma carga elétrica de modo que os faz resistentes à água, mas obviamente não são muito úteis em ambientes altamente magnéticos.
Microfones de eletreto
Os microfones de eletreto são peque-nos e eficazes na detecção de sons de alta frequência. Eles são utilizados em milhões de computadores e dispositivos eletrônicos ao redor do mundo. São relativamente baratos, e a única desvantagem que possuem é a falta de graves. Além desses, os microfones de carbono, que são menos comuns atualmente, podem ser utilizados em aplicações nas quais a qualidade do som não seja primordial.
Vibração
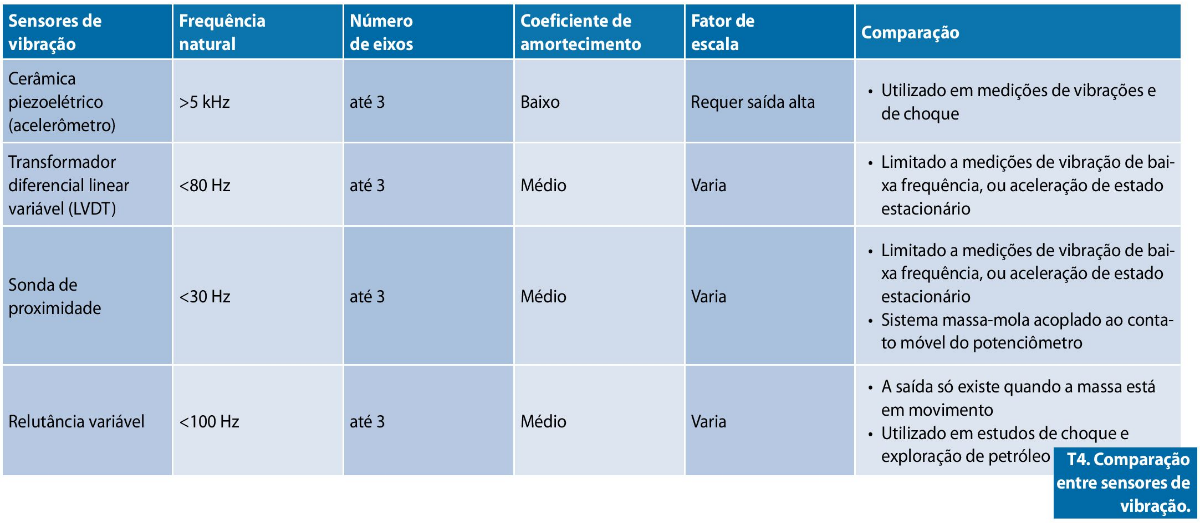
A tabela 4 mostra uma comparação entre sensores comuns de vibração. Explicaremos melhor nos próximos tópicos.
Sensor de cerâmica piezoelétrica, ou acelerômetro
Vibração ou aceleração são comumente medidas utilizando-se um sensor de cerâmica piezoelétrico ou acelerômetro.
Há três fatores importantes para diferenciar os sensores de vibração: a frequência natural, o coeficiente de amortecimento e um fator de escala. O fator de escala relaciona a saída para uma entrada de aceleração e está ligado à sensibilidade. Juntos, a frequência natural e o coeficiente de amortecimento determinam o nível de exatidão de um sensor de vibração.
Em um sistema que consiste em uma mola ligada a uma massa, se você puxar a massa da posição de equilíbrio e então soltá-la, ela vibrará para frente (além de posição de equilíbrio) e para trás até que entre em repouso. O atrito que faz com que a massa volte ao equilíbrio é definido pelo coeficiente de amortecimento, e a taxa com a qual ela vibra para frente e para trás é a sua frequência natural.
Sensores de vibração de cerâmica piezoelétrica são os mais comumente utilizados por serem os mais versáteis. Eles podem ser utilizados em medições de choque (explosões e testes de falha), medições de alta frequência, e medições mais lentas de baixa frequência. Isso devido à frequência natural acima da média que eles possuem. Porém, esses sensores geralmente possuem saídas da ordem de milivolts e requerem uma alta impedância de entrada e um detector de baixo ruído para interpretar as tensões do cristal piezoelétrico.
Sondas de proximidade e transformadores diferenciais lineares variáveis (LVDTs) Sondas de proximidade e LVDTs são parecidos. Ambos são limitados a medições de aceleração de estado estacionário ou vibrações de baixa frequência, porém o LVDT tem uma frequência natural um pouco maior, isso significa que ele pode manipular/detectar mais vibrações. A sonda de proximidade é simplesmente um sistema massa-mola acoplado ao contato móvel de um potenciômetro.
Sensor de vibração de relutância variável
Um sensor de vibração de relutância variável usa ímãs permanentes e o movimento através de bobinas para medir movimento e vibração. Este é um sensor especial de vibração porque ele somente registra saída quando a massa que está medindo estiver em movimento. Isso faz dele particularmente útil em estudos de choque de terremotos e exploração de petróleo para adquirir vibrações refletidas de estratos rochosos subterrâneos.
Posição e deslocamento
Você pode escolher entre muitos tipos diferentes de sensores de posição. Os principais fatores na escolha de um sensor de posição são a excitação, filtro, o ambiente e se é necessário que haja uma linha de visão ou uma conexão física direta para medir a distância. Não há um tipo de sensor de posição que possui preferência universal como ocorre para pressão ou força. Mediu-se posição com sensores por um longo período, então tanto a preferência quanto a aplicação possuem um papel ao tomar esta decisão. Observe a tabela 5.
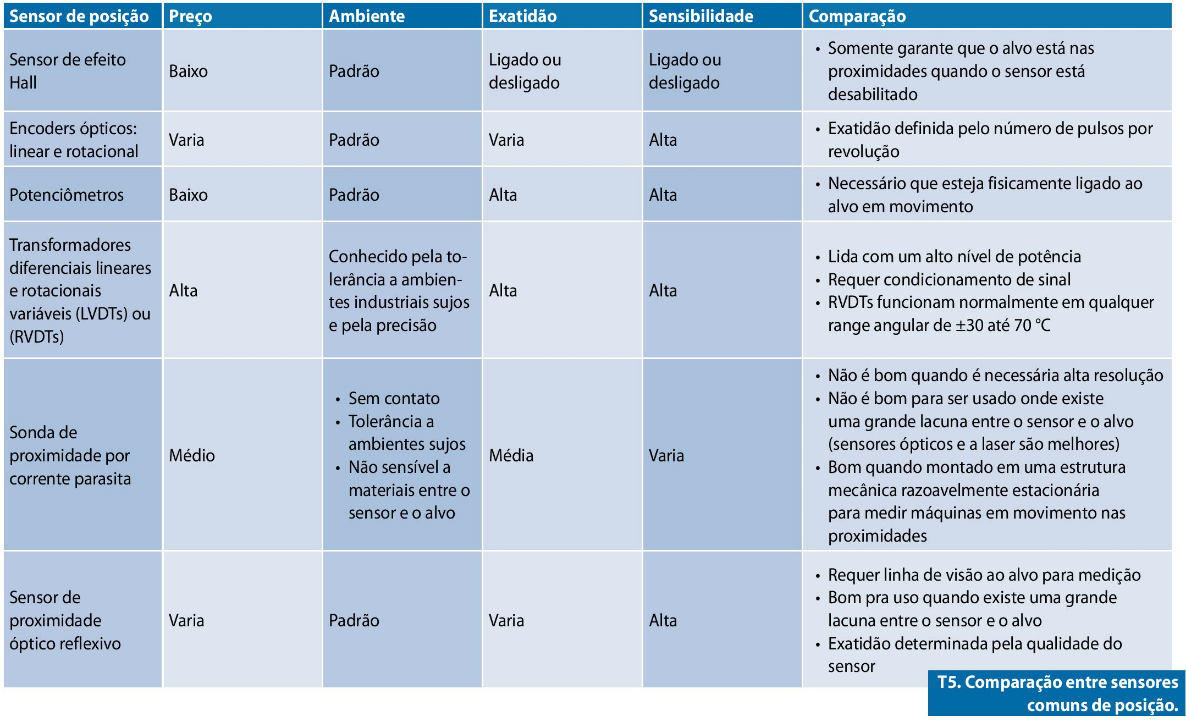
Sensores de efeito Hall
Com sensores de efeito Hall, a presença de um objeto é determinada quando ele para de pressionar um botão. O sensor está "ligado" quando o objeto está pressionando o botão, ou "desligado" quando o alvo estiver em qualquer outro lugar. Estes sensores têm sido utilizados em teclados ou mesmo em competições de batalhas entre robôs para determinar quando um impacto foi transmitido, eles não fornecem escalas para quão longe um objeto está deles quando o botão está em estado "desligado", mas são eficazes em aplicações que não requerem informações detalhadas quanto à posição.
Potenciômetros
Os potenciômetros são sensores que usam um contato deslizante para criar um divisor de tensão ajustável, essa tensão ajustável mede a posição. Eles fornecem uma pequena resistência ao sistema a que estão conectados fisicamente, e, embora isso seja necessário para seu uso, eles são baratos comparados a outros sensores de posição e podem oferecer uma grande exatidão.
Encoders Ópticos
Outro sensor de posição comumente utilizado é o encoder óptico, que pode ser linear ou rotacional. Esses dispositivos podem determinar velocidade, direção e posição com rapidez e alta exatidão. Como o nome sugere, eles utilizam a luz para determinar a posição, uma série de barras listradas divide a distância a ser medida em pulsos, e, quanto mais pulsos, maior a exatidão. Alguns encoders ópticos rotacionais podem ter até 30.000 pulsos, oferecendo uma exatidão extraordinária. Ainda, por causa do tempo de resposta curto que possuem, eles são ideais para muitas aplicações de controle de movimento.
Sensores com componentes físicos que são acrescentados a um sistema, como os potenciômetros, somam uma pequena quantidade de resistência ao movimento das partes do sistema, contudo, os encoders dificilmente produzem qualquer atrito quando eles se movem e são bastante leves, mas devem possuir selos para operarem em ambientes severos ou áridos, o que adiciona custos. Ocorre normalmente também um custo adicional em aplicações com elevada exatidão, porque os encoders precisam ter os seus próprios rolamentos para evitar o desalinhamento quando forem incorporados nos produtos.
Transformadores Diferenciais Lineares Variáveis (LVDTs)
Transformadores diferenciais lineares variáveis (LVDTs) e os seus equivalentes para rotação (RVDTs) utilizam indução magnética para determinar a posição. Ambos são eficazes para aplicações industriais e aeroespaciais por causa da robustez que apresentam. Os dois também requerem condicionamento de sinal, o que pode somar custos. Além disso, esses sensores devem estar precisamente alinhados dentro de uma embalagem pesada e cara, e possuem bobinas cujo custo de fabricação é alto. Além do seu custo, eles são conhecidos pela elevada precisão.
Sensores por corrente parasita
Sensores por corrente parasita utilizam campos magnéticos para determinar a posição e possuem preços moderados. Eles são menos empregados em aplicações que requerem informações muito detalhadas de posicionamento, ou onde haja lacunas extensas entre o sensor e o alvo. Estes sensores são melhor utilizados em linhas de montagem, quando são montados em uma estrutura mecânica razoavelmente estável para medição em máquinas ou produtos em movimento nas proximidades. Para obtenção de informações precisas de posicionamento deve ser utilizado um sensor de proximidade óptico.
Sensores de proximidade óptico reflexivos
Sensores de proximidade óptico reflexivos utilizam o tempo de viagem que um feixe leva para ir e voltar de um alvo reflexivo para determinar a distância. Eles possuem um tempo de reposta rápido e são excelentes em aplicações onde há lacunas grandes entre o sensor e o alvo, é necessário que haja uma linha de visão quando este sensor está sendo utilizado. A exatidão e a qualidade do sensor estão diretamente relacionadas com o seu preço.
Pressão
Pressão alta ou pressão baixa são conceitos relativos, como o calor. Pode estar "quente" em uma sala, mas a temperatura nela não é nada quando comparada à temperatura na superfície do Sol. Para a pressão, a medição é feita por comparação.
Há cinco tipos comuns de medição de pressão: absoluta, manométrica, de vácuo, diferencial e cápsula selada. Considere o exemplo a seguir de medição de pressão dentro de um pneu, e note como cada tipo principal está relacionado a uma diferente pressão de referência. Veja a tabela 6.
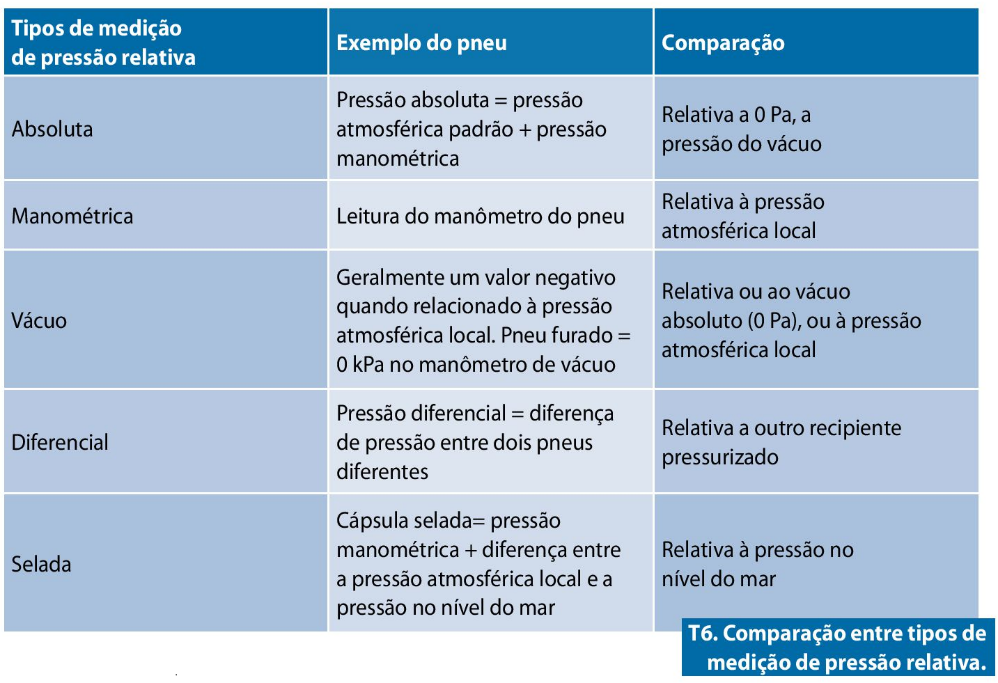
• Uma medição de pressão absoluta inclui a pressão-padrão do peso da atmosfera (101,325 kPa) e a pressão adicional dentro do pneu. Geralmente a pressão do pneu é de 34 PSI, ou aproximadamente 234 kPa. A pressão absoluta é de 234 kPa mais 101,325 kPa ou 335,325 kPa;
• Uma medida de pressão manométrica é relativa à pressão atmosférica local e é igual a 234 kPa (ou 34 PSI);
• A pressão de vácuo é relativa ou a um vácuo absoluto, à pressão atmosférica local. Um pneu furado poderia ter a pressão igual à pressão atmosférica ou 0 kPa (relacionada à pressão atmosférica). Essa mesma medição de pressão poderia ser igual a 234 kPa (relacionada a um vácuo absoluto);
• Pressão diferencial é simplesmente a diferença entre dois níveis de pressão quaisquer. No exemplo do pneu, isso significa a diferença de pressão entre dois pneus. Também poderia significar a diferença entre a pressão atmosférica e a pressão dentro de um único pneu;
• Medições de cápsula selada são medições de pressão diferencial tomadas com uma pressão conhecida de comparação. Geralmente essa pressão é a do nível do mar, mas poderia ser qualquer pressão dependendo da aplicação.
Cada um desses tipos de medições poderia alterar os seus valores de pressão, então é necessário que você saiba o tipo de medição que os seus sensores estão efetuando. Sensores baseados em ponte (strain gages) ou sensores piezoresistivos, são os mais frequentemente utilizados. Isso ocorre devido à construção simples e à durabilidade que eles possuem. Essas características permitem que os custos sejam diminuídos, tornando-os ideais para sistemas com alto número de canais.
Esses sensores de pressão comuns podem ser condicionados ou não condicionados. Geralmente os sensores condicionados são mais caros por conterem componentes para filtro e amplificação de sinais, além de fios de excitação e os circuitos comuns para medição. Se você está trabalhando com sensores baseados em ponte não condicionados, o seu hardware requer condicionamento de sinal. Verifique a documentação do sensor para que você saiba se precisa de componentes adicionais para amplificação ou filtragem.
Força
No passado, medidas de força eram feitas principalmente por balanças de alavanca. Hoje, células de carga que utilizam strain gages são mais comuns porque elas não requerem toda a calibração e manutenção necessária para balanças, como mostra a tabela 7.
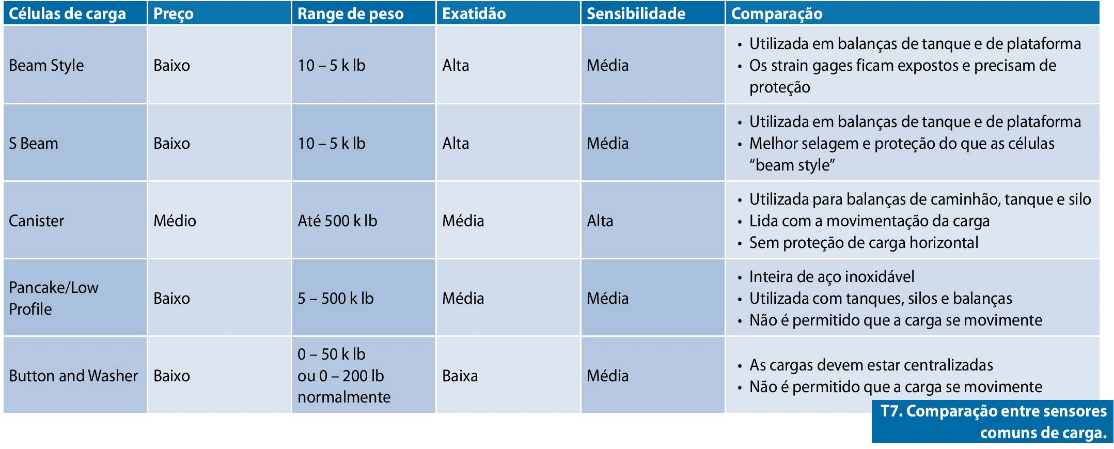
Células de carga podem ser condicionadas ou não condicionadas. As células de carga "beam style" são úteis quando se espera uma força linear e são normalmente usadas em aplicações de pesagem tanto de itens grandes quanto de itens pequenos (10 lb até 5000 lb). Elas possuem uma sensibilidade mediana, entretanto, são altamente exatas. Este tipo de célula de carga possui baixo custo e construção simples.
A célula de carga do tipo "S beam" é semelhante à célula "beam style" com exceção da sua forma. Por conta dessa diferença nos modelos (a forma característica de "S" da célula de carga), o sensor é eficaz para grande rejeição de carga lateral e medição do peso de uma carga que não está centralizada. Esse modelo de baixo custo de célula de carga também é simples.
A célula de carga "canister" pode lidar com cargas maiores que a "S beam" e a "beam style". Ela também pode facilmente lidar com a movimentação da carga e é altamente sensível, entretanto, este sensor necessita de proteção de carga horizontal.
Células de carga "pancake" ou "low-profile" são projetadas de modo que não requerem absolutamente nenhum movimento para realizarem uma leitura exata.
Se a sua aplicação possui restrições de tempo ou precisa de medições rápidas, você deve considerar o uso de células "canister".
Células de carga "button" e "washer" são geralmente utilizadas para a medição do peso de objetos menores (até 200 lb). Assim como as células "pancake" ou "low-profile", o objeto que está sendo pesado não pode estar em movimento, para que seja obtida uma medida exata. A carga também deve estar centralizada no que normalmente é uma balança pequena. O benefício dessas células de carga é que elas não são caras.










