Esse robô inseto de seis pernas acionadas por servo motores de aeromodelos é controlado pelo BASIC Stamp. Divertido de montar, possibilita uma fácil programação.
É impressionante como todo elemento cibernético causa curiosidade e admiração nas pessoas. Notamos isso em um dos artigos do BASIC Stamp que fez mais sucesso, o do robô Soccer.
Pessoalmente, tenho um fascínio a parte pelos robôs e quando vi o StampBug, fiquei muito curioso sobre como ele se comportaria andando e quais seriam as reações das pessoas.
Nesse artigo vou tentar fazer com que o leitor participe do prazer que tive em montar e testar o robô, quem sabe conseguiremos mais um adepto para a Robótica.
Como em todos artigos que escrevo sobre o BASIC Stamp sempre tenho a preocupação de passar uma técnica de programação diferente e elementos periféricos novos, neste, veremos como controlar servo motores de aeromodelos, e o leitor poderá utilizar essa técnica em outros projetos, como por exemplo, no controle de movimento de uma câmera de vídeo. As informações poderão ajudar a montar o próprio Kit ou um outro projeto de robô.
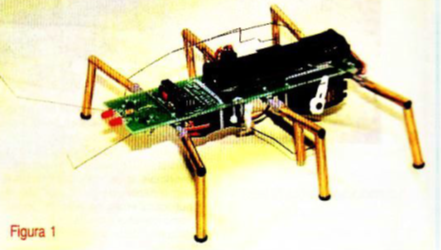
O leitor deve estar perguntando: O que é o StampBug? A resposta é simples, um Kit de montagem comercializado pela Parallax, a mesma empresa que produz o BASIC Stamp. Na foto observamos o robô já montado, com destaque para suas seis pernas. O nome Stamp, do inglês, selo postal, faz referência ao BASIC Stamp e Bug do inglês também significa Inseto.
O Kit contém todo o material necessário para a montagem (exceto estanho para soldagem e bateria), inclusive o microcontrolador PIC com o programa do BASIC Stamp.
Entendendo o funcionamento mecânico do StampBug.
Antes de começarmos a montagem, vamos entender o acionamento do StampBug e seus movimentos básicos. O StampBug caminha utilizando o método da triangulação alternada ou seja, quando ele tem as pernas da frente e detrás de um lado apoiadas no chão, do outro lado a perna central está fazendo apoio e as pernas da frente e de trás estão suspensas para movimento. Fica-mais fácil, observando a figura 2.
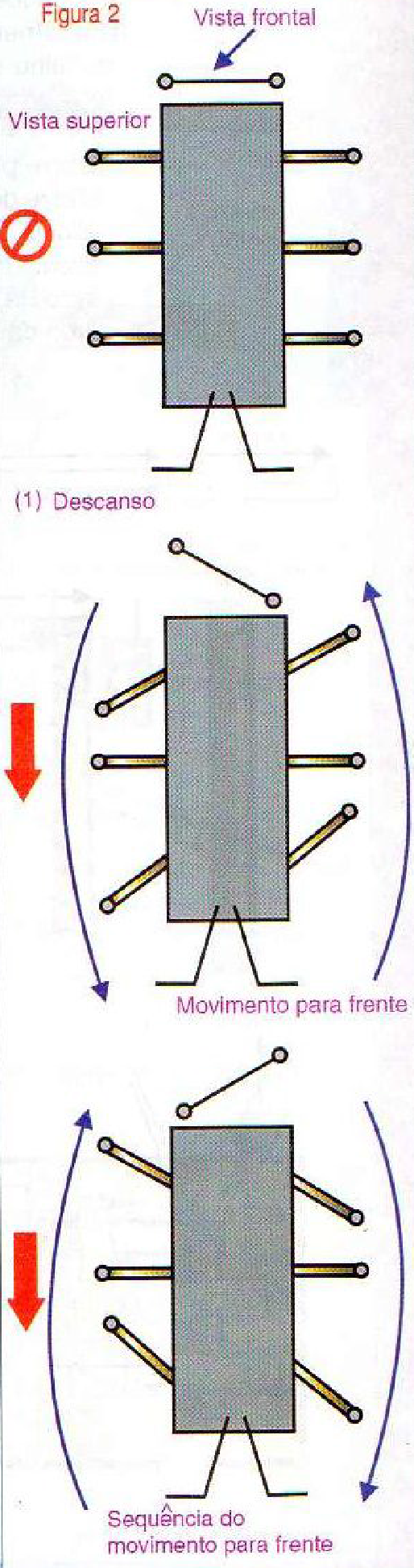
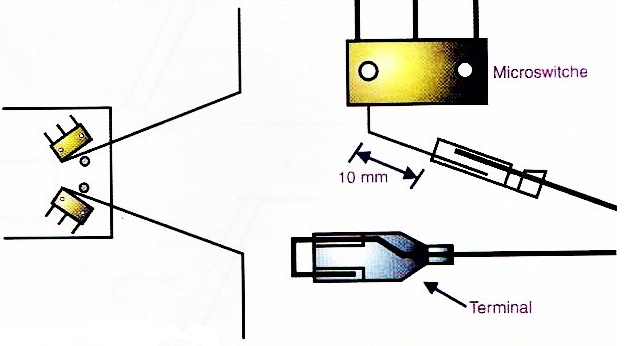
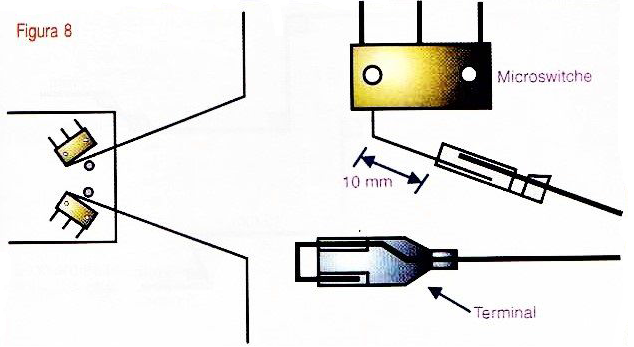
Esse acionamento possibilita que o robô ande em linha reta para frente ou para trás e ainda faça curvas para a direita ou esquerda O robô foi projetado para caminhar em superfícies planas, caso encontre obstáculos, Os mesmos serão sentidos pelas “antenas” que acionam micro switches, fazendo com que o BASIC Stamp execute um movimento de desvio de rota
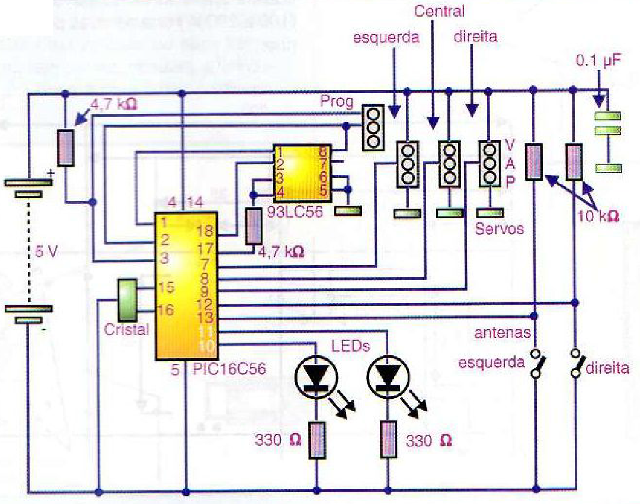
Diagrama elétrico
Na figura 3 podemos observar a simplicidade do sistema, destacando o BASIC Stamp no controle.
Servo motores
São motores que acionam um redutor que está acoplado a um potenciômetro que irá dar o “feedback” de posicionamento ao sistema eletrônico interno.
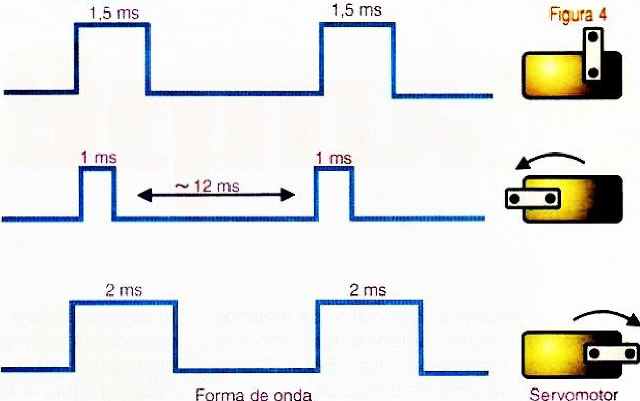
Para movimentar o servo, temos de gerar um sinal PWM (Pulse wide modulation) - Modulação por largura de pulso. Dependendo da largura do pulso, o servo irá se posicionar diferente. A temporização do servo utilizado no Kit (Hitec-300) é mostrada na figura 4. Caso o leitor utilize servos da Futaba, os movimentos são inversos, O que provocará um movimento contrário ao desejado, se utilizado o programa para o servo Hitec-300.
Existem vários tipos e tamanhos de servos, a temporização basicamente é semelhante a apresentada, mas o leitor deverá fazer um programa de teste para obter a correta temporização.
Descrição da montagem
Existe um grau de dificuldade médio na montagem, principalmente, no corte e solda dos tubos de latão para montagem das pernas.
Se o leitor tem prática na montagem de aeromodelos não encontrará grandes dificuldades, caso contrário, aconselho um estudo detalhado das instruções antes de executar as ações de corte, solda, dobras e ajustes.
Para a montagem foram necessárias aproximadamente 6 horas de trabalho com as seguintes ferramentas:
- chave philips
- chave de fenda
- alicate de bico
- alicate de corte
- ferro de soldar de 30 W e de 100 W ou 200 W
- arco de serra para metal
- lima redonda de 6 mm.
- furadeira
- broca de 1,0 mm
- broca de 2,5 mm
- broca de 2,0 mm
Passos para a montagem:
1- Corte e Solda das pernas
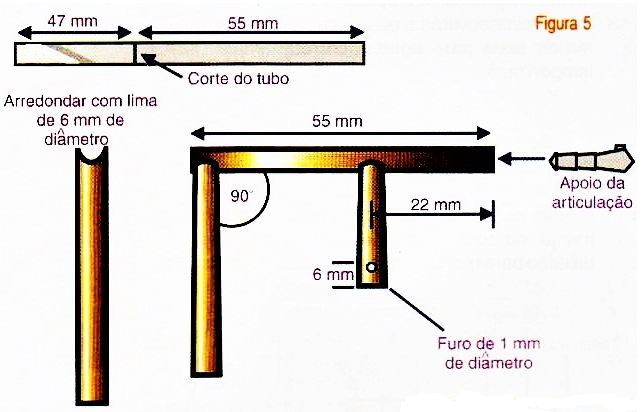
No kit estão 7 tubos de 102 mm. Separar 6 tubos e fazer um corte para obter duas peças com 47 e 55 mm.
Na peça de 47 mm, fazer um arredondamento com a lima de 6 mm, de tal maneira que se encaixe na peça de 55 mm, formando um ângulo de 90 graus.
Na figura 6 observamos a montagem, utilizando um ferro de soldar de potência alta (100 a 200 W) una as duas peças com estanho.
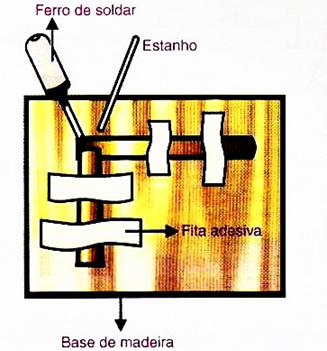
Para facilitar a soldagem, as peças podem ser fixadas com fita adesiva em uma base de madeira.
Limpando bem as extremidades e usando pasta de solda, não tive grandes dificuldades para o estanho fluir em toda a junção, inclusive na parte de baixo em contato com a madeira.
Após a soldagem, fazer o acabamento com lixa fina. Essa etapa deve ser repetida para as seis pernas, separar duas pernas para a parte central e com o sétimo tubo cortar duas peças de 30 mm e soldar 22 mm da extremidade interna de cada perna (ver figura 5).
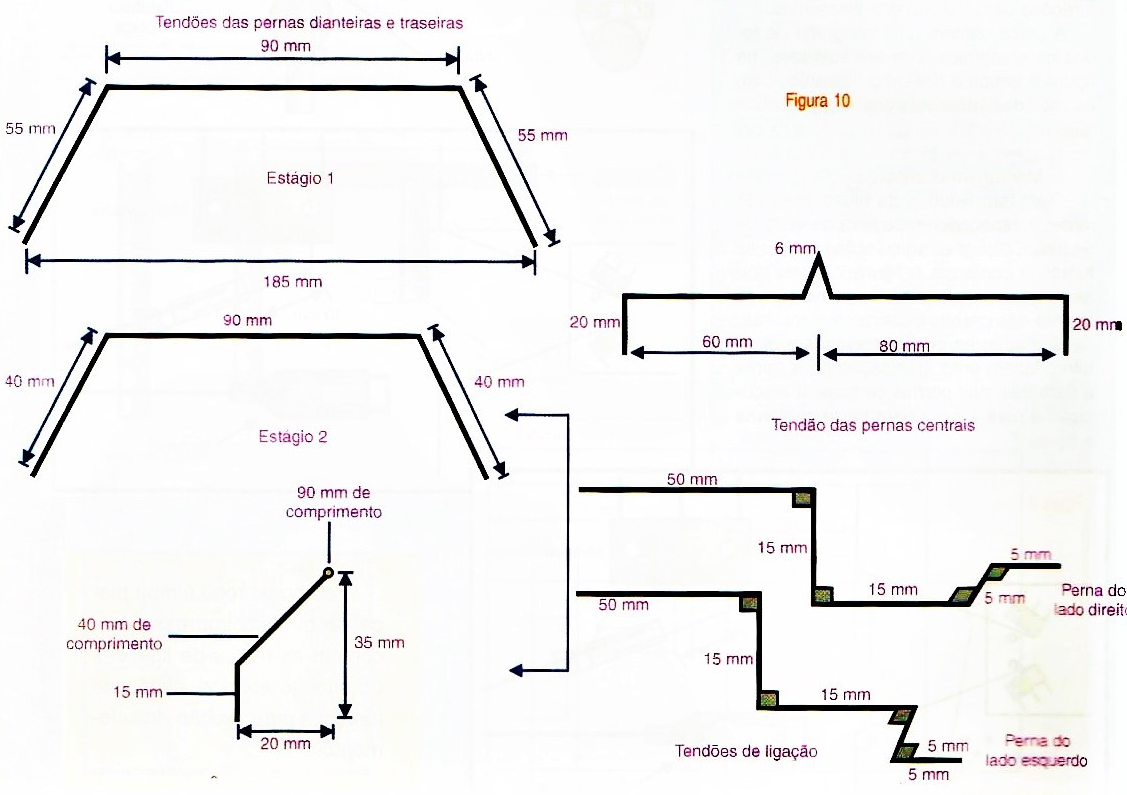
Fazer a furação para fixação dos tendões. Colocar nas seis pernas o receptor da articulação.
2- Montagem do corpo
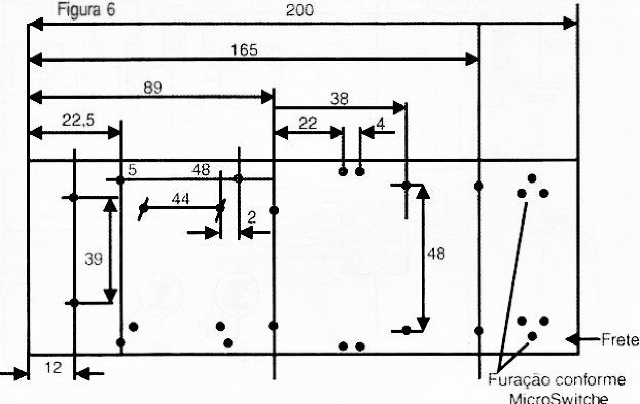
O corpo do robô é uma placa de circuito impresso que contém as trilhas de ligações do circuito elétrico, além das furações para fixação dos elementos.
A placa contém uma serigrafia de todos os elementos a serem soldados, na figura 6 temos o desenho mecânico com as medidas principais dos furos de fixação.
3- Montagem das pernas
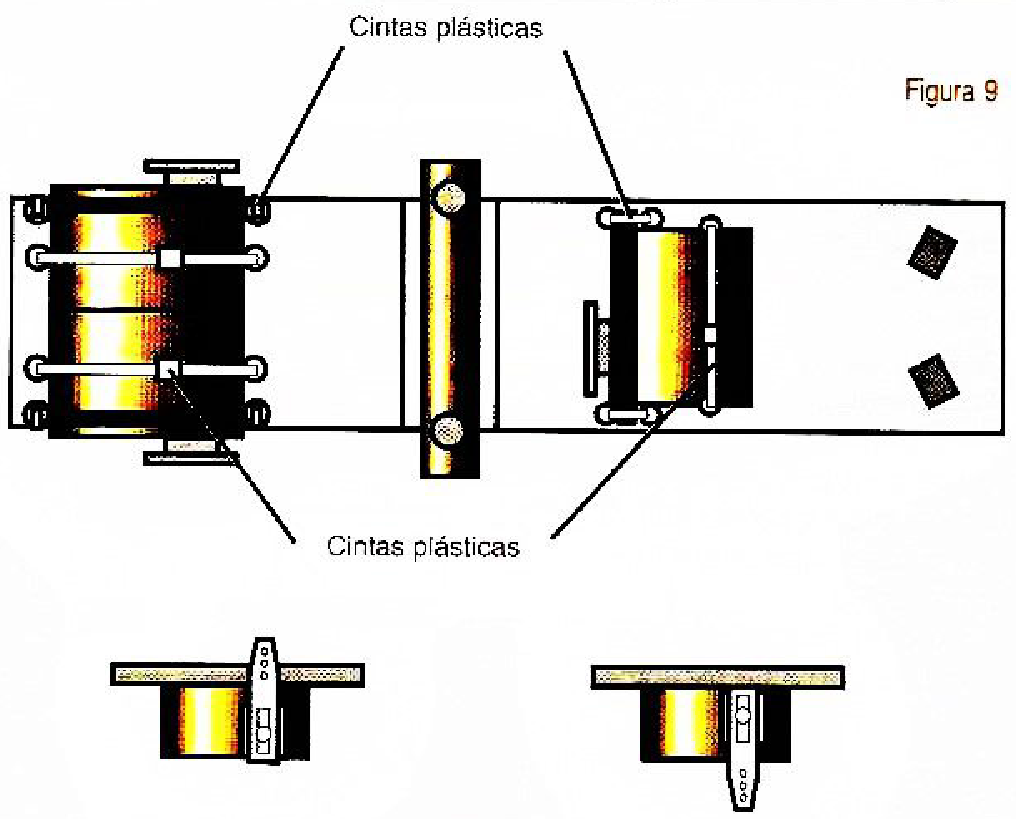
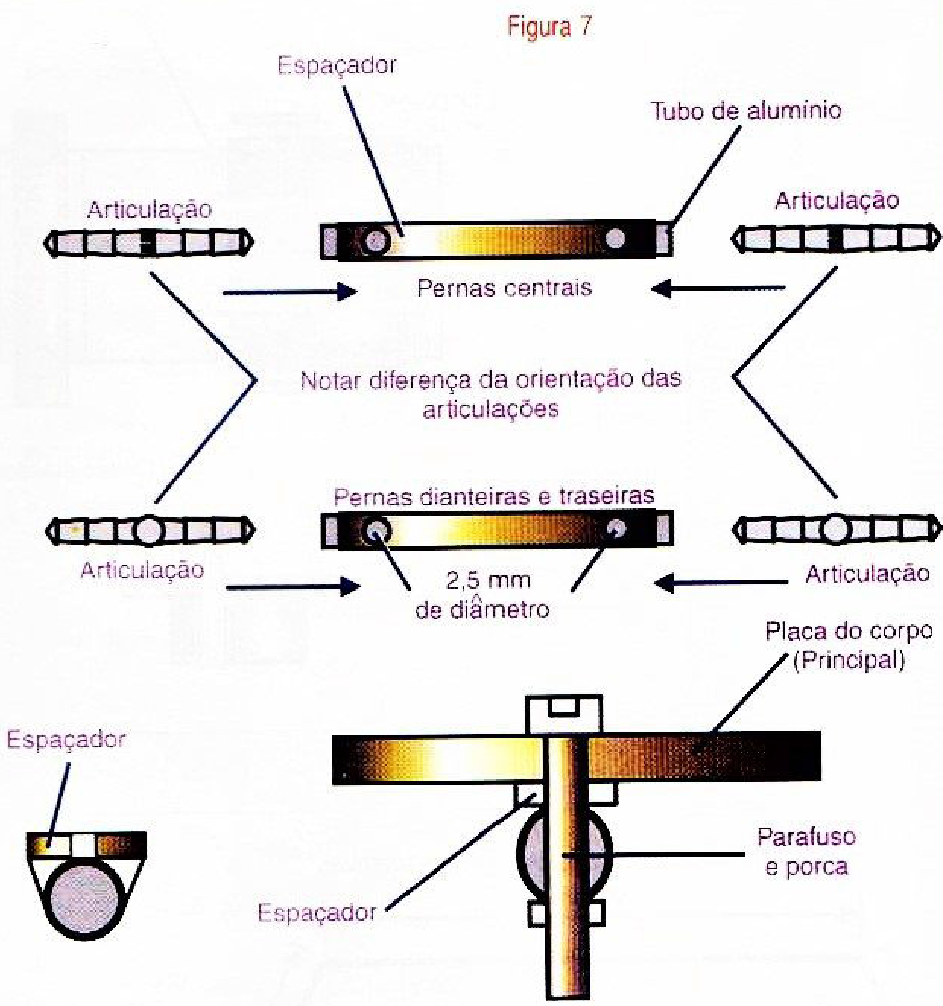
O kit tem 3 tubos de alumínio de 57 mm e 3 espaçadores de fibra de vidro de 54 mm. Colocar as articulações e fazer as furações conforme a figura 7, notar que as pernas centrais têm uma montagem diferente das pernas traseiras e dianteiras.
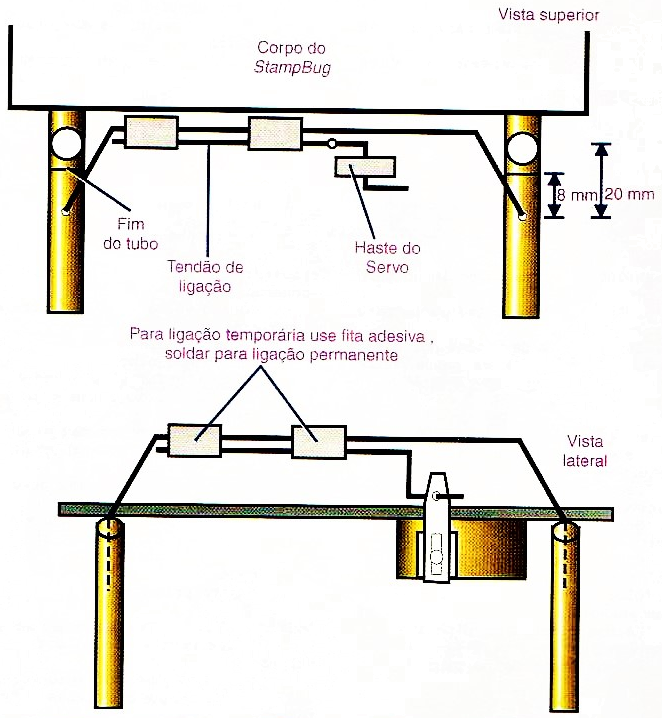
Enquanto as pernas traseiras e dianteiras fazem uma articulação para frente e para trás, nas pernas centrais, a articulação é para cima e para baixo conforme a figura 7.
O corpo do robô é uma placa de circuito impresso que contém as trilhas de ligações do circuito elétrico, além das furações para fixação dos elementos.