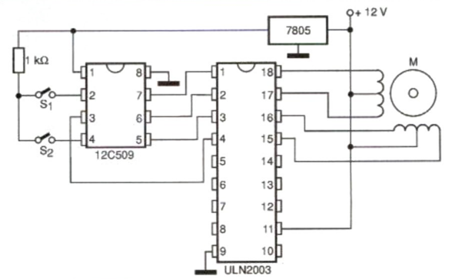
Nesta aplicação utilizamos um circuito adicional de entrada para possibilitar o comando lógico com chaves, sensores ou outros recursos. O acionamento de cada bobina do motor vai depender da combinação de níveis fornecida pelos sensores de entrada, conforme tabela semelhante à do circuito anterior. O circuito integrado usado é o ULN2803, que também pode controlar motores de até 500 mA por enrolamento. Note que temos um circuito regulador de tensão de 5 V que reduz os 12 V da fonte do motor para os 5 V necessários à alimentação do circuito lógico 12C509. As entradas não usadas deste circuito devem ser aterradas através de um resistor de 10k ohms para que as instabilidades de funcionamento sejam evitadas. O circuito integrado 7805 não precisará de radiador de calor, dada a baixa corrente que deve fornecer. O 12C509 é um PIC que deve ser programado para esta função. Mais informações de como usar este componente nesta aplicação poderão ser obtidas em: www.beowulf.demon. co.uk/stepper.html e em www.phanderson.com/PIC12C509/overview.html