









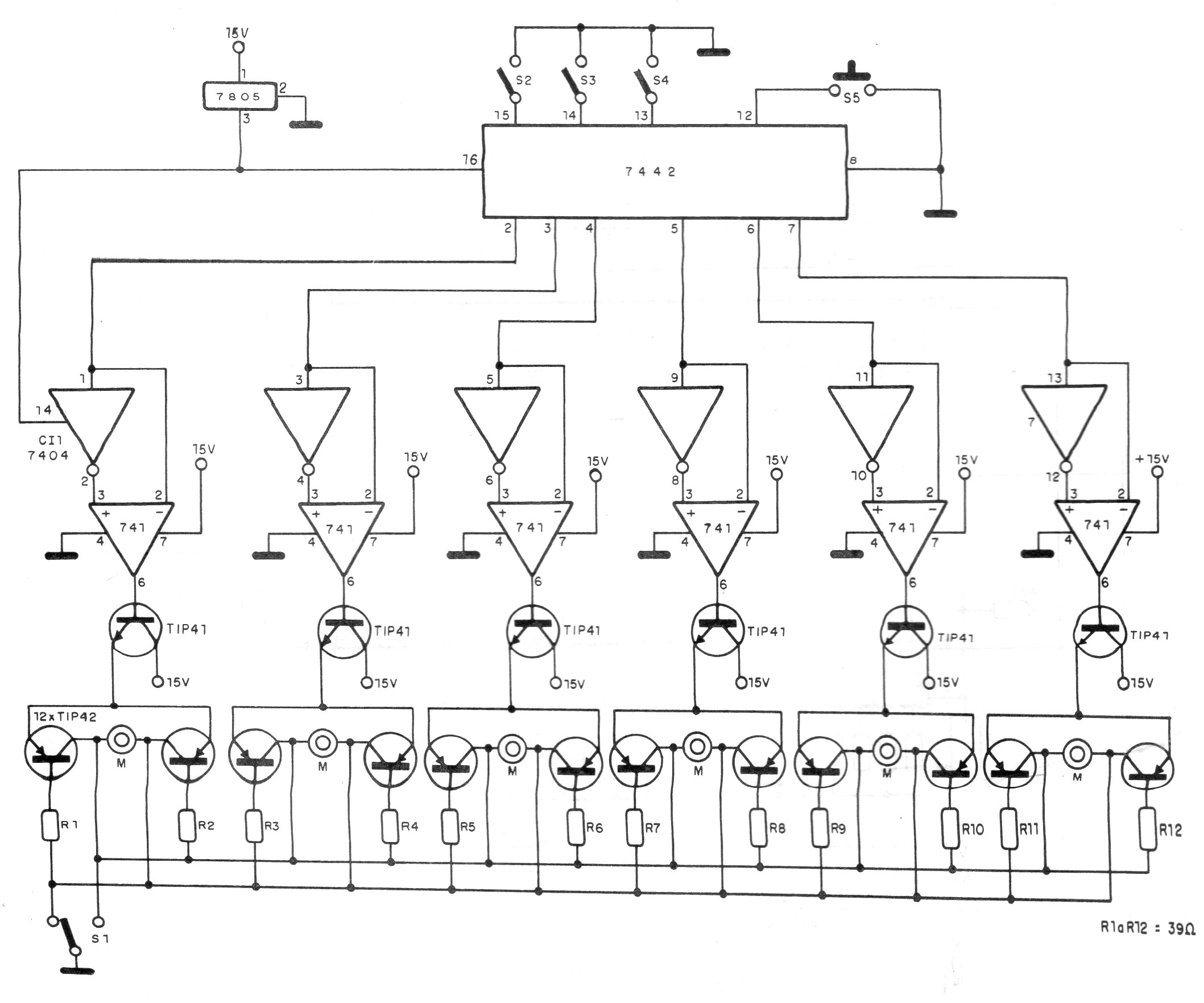
Este circuito é de uma documentação de 1994. Ele consiste num controle para diversos motores de corrente contínua que fazem parte de um braço robótico ou mecânico. O circuito pode também funcionar como shield sendo controlado por um microcontrolador. A tensão de alimentação é de 5 V pois o circuito usa componentes TTL.
| Clique na imagem para ampliar |








