









Pequenos robôs em kit não se constituem apenas em brinquedo ou material de recreação. Mais do que isso, versões que empregam tecnologias mecânicas e eletrônicas avançadas podem ser usadas como material didático de grande valor nos cursos técnicos de robótica. Mecatrônica, automação industrial e informática. O modelo que descrevemos neste artigo, que é um robô caminhante, é um exemplo. Os leitores, ao analisarem seu princípio de funcionamento e como ele pode ser controlado por um microprocessador facilmente perceberão suas inúmeras possibilidades de aplicação prática.
Nota: este é um artigo antigo de uma série de 1995 e 1996. Os outros artigos estão no site a partir de MEC190.
O Basic Stamp que tem sido abordado em inúmeros artigos desta revista, como a solução inteligente para diversos processos automatizados, também pode ser acoplado a modelos de xx xxxxx em kits como o que apresentamos neste artigo
Assim temos duas possibilidades interessantes de montagem para os leitores que gostam de robótica aplicada:
Na primeira podemos ter a simples montagem de um robô caminhante, o SOCCER ROBOT (referência ao futebol, já que ele pode chutar uma pequena bola e a partir de duas unidades pode-se disputar uma partida do esporte bretão), e que consiste num brinquedo ou objeto de demonstração.
Na segunda podemos ter o acoplamento do Basic Stamp (*] um microcontrolador que pode ser programado para que o robô taça de modo automático diversos tipos de movimentos ou trajetos.
Esta segunda versão e especialmente interessante para os cursos técnicos já que podemos unir à eletrônica à mecânica e com isso explorar todas as possibilidades da robótica e da mecatrônica.
O SOCCER ROBOT
Trata-se de um pequeno Robô alimentado por pilhas produzido pela empresa japonesa OWl Inc e que pode ser obtido na forma de Kit para montagem. Se bem que o fabricam o descreva como um brinquedo destinado a crianças maiores que 10 anos (e nesta faixa certamente todos nós nos incluímos), as possibilidades de adaptação de recursos eletrônico no seu controle, o levam a uma importante aplicação no campo didático, conforme já deixamos patente.
A montagem do robô é bastante simples e as peças possuem um excelente acabamento, não havendo problemas de encaixes como ocorre em alguns conjuntos de montagem de procedência duvidosa. O próprio manual de montagem é bem elaborado descrevendo passo a passo todo processo de montagem. O autor demorou pouco mais de duas horas para fazer o robô andar.
(*). Para os leitores que não conhecem ainda o Basic Stamp sugerimos a leitura dos artigos anteriores nesta mesma revista em que descrevemos este importante microcontrolador.
Na versão básica o robô é alimentado por pilhas e caminha controlado por um controle remoto por fio. Na figura 1 temos o aspecto da versão básica do robô montada.
Um ponto interessante que deve ser observado pelos estudantes de robótica é a solução dada para o processo de caminhar deste pequeno robô. O sistema usa o conceito de árvore de manivelas, como nas antigas locomotivas a vapor. Este sistema juntamente com a redução do motor é mostrado na figura 2.
E interessante analisar o modo como o robô caminha para que eventuais alterações no sistema de controle possam ser imaginadas pelos leitores que desejam uma aplicação mais avançada a partir de um microcontrolador como o Basic Stamp.
A caminhada ocorre com as seguintes fases:
a) Quando a perna central está levantando, as das extremidades estão fazendo contato com o chão e ao mesmo temo fazendo um movimento para trás.
b) O robô avança para a frente com as pernas das extremidades tracionando, ao mesmo tempo em que o conjunto avança um passo.
c) Quando as pernas das extremidades estão no limite do movimento para trás, a perna do centro desce e apoia no chão levantando as pernas da extremidade.
d) A perna central faz o movimento para trás levando o robô para frente e as pernas das extremidades para frente.
Para a montagem do robô existe um manual completo, motivo pelo qual não será necessário dar explicações sobre a maneira como isso é feito neste artigo. Apenas lembramos aos leitores que se trata de kit feito para “crianças” a partir de 10 anos, o que significa que além do detalhamento de todas as fases, nenhuma delas apresenta maiores dificuldades e nem exige qualquer tipo de ferramenta especial.
FAZENDO O ROBÔ ANDAR
Para fazer o robô andar é muito simples: o controle remoto tem duas chaves sendo uma para controlar o motor esquerdo e a outra para controlar o motor direito. Acionando duas para frente ao mesmo tempo o robô anda em linha reta para frente. Acionando as duas para trás ao mesmo tempo, o robô anda em linha reta para trás. Para fazê-lo voltar para o mesmo lado, basta acionar a mesma chave no sentido oposto. A curva para o outro lado é obtida da mesma forma, com o acionamento da outra chave.

É interessante observar o movimento deste pequeno robô; meio desengonçado e barulhento dele chama a atenção de todos, principalmente das crianças.
O kit é acompanhado de uma bola de ping-pong pintada com os padrões de uma bola de futebol. Esta bola, conforme sugere o nome do próprio robô, pode ser usada para que em conjunto com outro robô sejam disputadas partidas de futebol.
O QUE O MANUAL ENSINA
Conforme salientamos na parte introdutória, a montagem deste robô não é apenas uma recreação, mas pode ensinar muito.
O próprio manual além de detalhar a construção possui uma parte teórica e até um questionário que pode ser usado nos cursos técnicos. Basicamente o manual explica:
a) Como funcionam os motores elétricos de corrente contínua.
b) Como se faz o acionamento de motores elétricos
c) Como é feita a transmissão de movimentos com caixas de redução
d) O conceito de torque em relação à velocidade
e) A tração das pernas
f) Dá um questionário final com perguntas relacionadas à teoria
O ROBÔ E O BASIC STAMP
A ideia básica de se agregar o Basic Stamp ao robô foi dotá-lo de um “cérebro”. Desta forma, pode-se retirar o controle remoto e dotar o pequeno robô de um sistema que o leve a realização de movimentos próprios a partir de um programa.
O importante na adaptação feita é que não se necessita de qualquer alteração na parte mecânica.
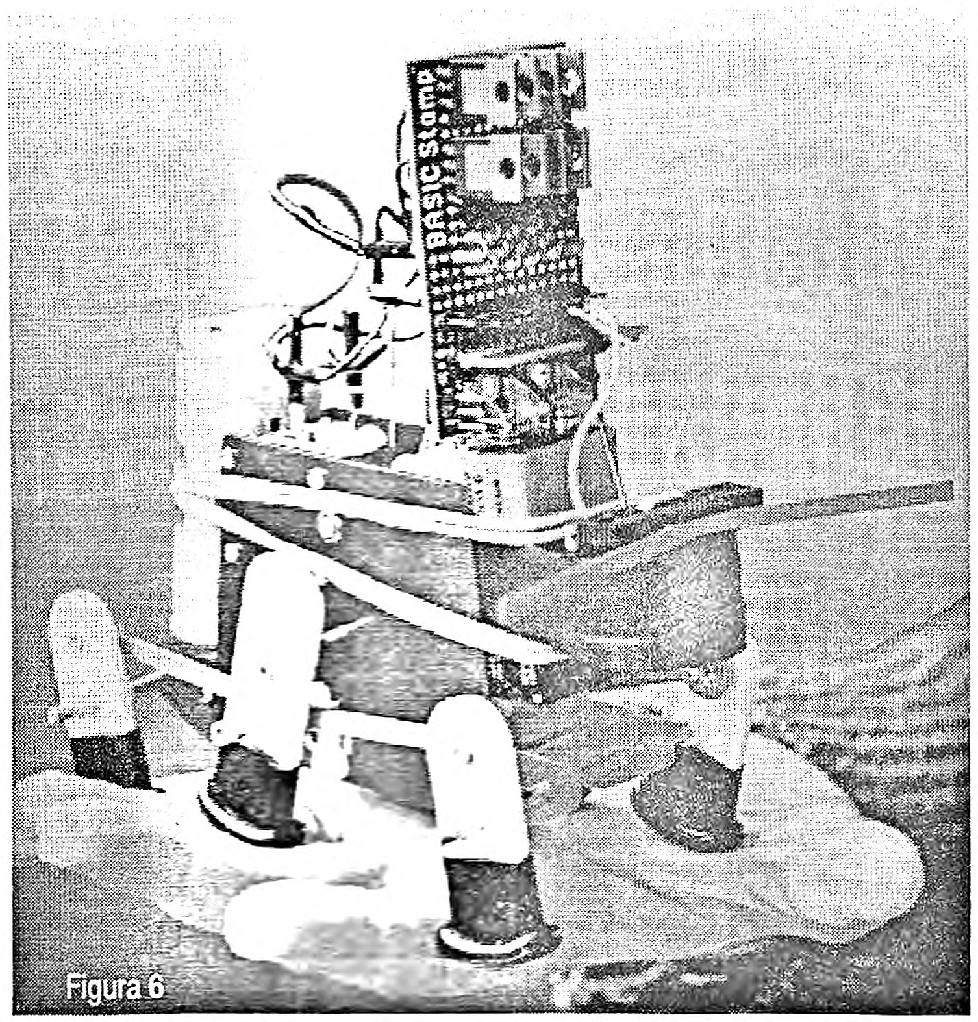
Na figura 6 temos o aspecto do robô com o Basic Stamp que passa a formar uma espécie de cabeça que dá ao modelo um aspecto de inseto cibernético.
As antenas são chaves do tipo microswitch que fazem o papel de sensores de obstáculos. Durante o movimento do robô estas chaves podem perceber obstáculos informando o circuito do Basic Stamp que, segundo a programação, determinará a manobra que deve ser feita para fugir deste obstáculo.
Com a utilização do Basic Stamp e anulação do controle remoto as duas pilhas passam a ser instaladas no próprio modelo, numa pequena caixa na parte traseira.
Na figura 7 temos o circuito do Basic Stamp. Este Circuito comanda os motores a partir de transistores na configuração em ponte H.
A escolha dos transistores indicados no diagrama foi feita em função da sua disponibilidade. No entanto, equivalentes que operem com correntes de coletor na faixa de 500 mA podem ser usados já que o consumo de cada motor é da ordem de 250 mA na condição de carga máxima.
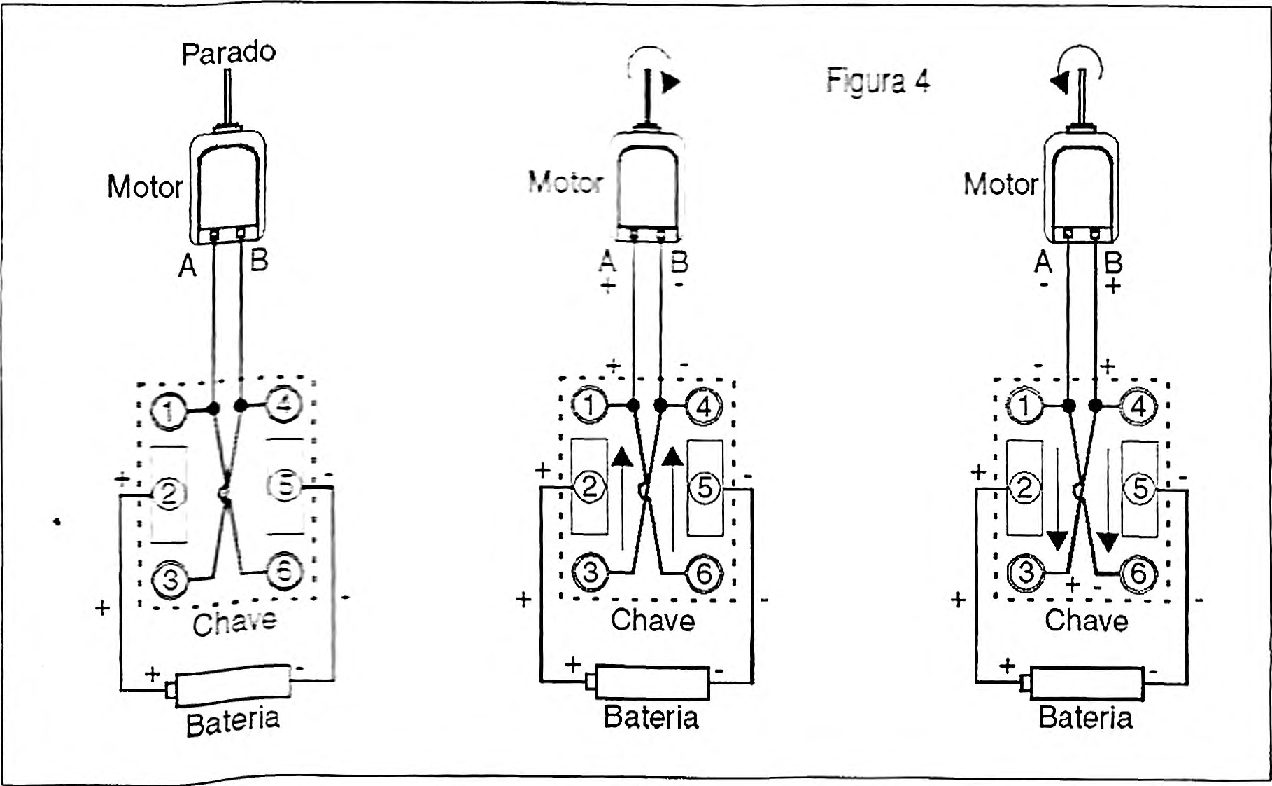
No circuito, o Basic Stamp aciona os motores pelos pinos I/O (P4 e P5 para o motor 1 e P6 e P7 para o motor 2). Quando os pinos de I/O P4 e P5 estão no nível baixo (O V) os transistores não conduzem e o motor ficará parado. Quando P4 estiver no nível alto (+5 V) e P5 no nível baixo (OV) o motor vai girar num sentido.
Quando os níveis lógicos de P4 e P5 se inverterem o motor girará no sentido Oposto. Veja que a condição das duas saídas em nível alto é proibida pois colocaria a alimentação de 3 V em curto.
MONTAGEM DO BASIC STAMP
Como a montagem do Basic Stamp não faz parte do Kit vale a pena uma descrição para os leitores interessados. Foi utilizado um CARRIER BOARD para a montagem do circuito. A fixação das chaves microswitch foi feita em uma tampinha plástica de refrigerante por meio de fio de arame. A tampinha foi fixada em uma bateria de 9 V utilizando fita adesiva. Note que esta fixação deve ser feita observando-se a polaridade da bateria de tal forma que a face dos componentes do CARRIER BOARD fique para frente.
A fixação do“cérebro"(CARRlER BOARD, bateria e chaves, etc) e do suporte das pilhas de 1,5 V no corpo do robô é feita usando elásticos. A sequência de montagem é mostrada na figura 8.
Evidentemente existe sempre a possibilidade do leitor fazer modificações com a elaboração de suportes apropriados. A ideia de se fixar com elásticos parte da proposta inicial de não alterar a parte mecânica do robô.










