Atendendo a inúmeros pedidos, neste artigo trazemos aos nossos leitores um robô controlado via RF (Radiofrequência). Apesar da radiofrequência ser a "pedra no sapato" de muitos hobistas e estudantes, a montagem do robô que propomos é bem simples, pois dispensa confecção de bobinas, regulagens em trimers, trimpots e outros. A montagem também é ideal para os leitores que desejavam montar um robô sem o uso de microcontroladores.

Nota: este artigo foi publicado na revista Mecatrônica Fácil, edição de março de 2004
SOBRE A COMPLEXIDADE DAS MONTAGENS COM RADIOFREQUÊNCIA
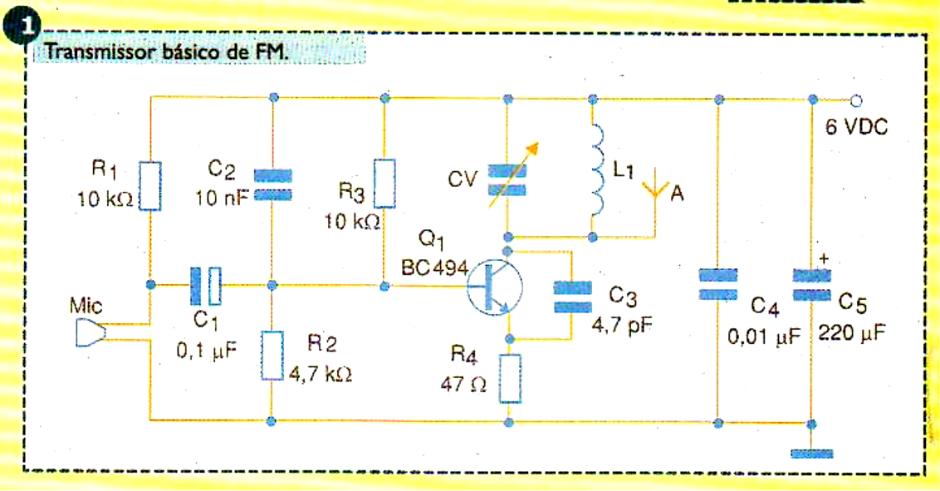
Sempre que falamos em projetos com radiofrequência, nos vem aquela imagem do transmissor básico de FM (figura 1). Esse tipo de transmissor é funcional, porém para algumas aplicações o seu uso torna-se crítico. Por exemplo, digamos que o leitor deseje enviar dados (bytes) via RF a uma velocidade razoável. Certamente com este tipo de transmissor haverá problemas, pois, o mesmo foi desenvolvido para enviar sinais de áudio, e não dados (bytes). E, para usar o transmissor citado, o leitor deveria montar um receptor e este deveria entregar o sinal recebido a um outro circuito com filtros PLL, por exemplo. Estes circuitos possuem ajustes complexos. Um circuito receptor deste tipo teria cinco regulagens no total (uma no trimmer do transmissor, e mais quatro para os PLLs). Somando todas as regulagens teríamos no total, dez! Cinco no transmissor total (uma no trimmer do receptor, e mais quatro para os geradores de tom) e cinco no receptor (já detalhadas)!
"Até ai, sem problemas!" - dirão os mais afoitos. Mas eles esqueceram que regulagens em RF são sempre complexas. Todo e qualquer "corpo estranho" próximo ao circuito (incluindo-se aí o próprio leitor) pode atrapalhar uma boa regulagem. E outro problema hoje em dia, dependendo da região, é o grande número de rádios comunitárias, legais e piratas no espectro. Sendo assim, encontrar um "espaço" para uma aplicação experimental é outro desafio!
Mais uma vez o leitor deve estar se perguntando, "não dá para mudar de faixa?" Claro que sim, mas montar o projeto não seria nada fácil.
Para testar um transmissor de FM basta sintonizar um rádio também FM e ir variando o "trimmer" (no caso do circuito da figura 1) até ouvir o sinal emitido pelo transmissor. Já pensou fazer isso com um transmissor em uns 300 MHz? Tarefa árdua e difícil que requer equipamento caro e bons conhecimentos na área.
Decidimos então oferecer ao leitor uma montagem que:
- não precisa de regulagens e retoques na área de RF, tons ou outras;
- fácil de montar (circuito sem regulagens e sem microcontrolador);
- fácil evolução para "outras montagens" sem muito esforço.
MÓDULOS TELECONTROLLI PARA TRANSMISSÃO/ RECEPÇÃO
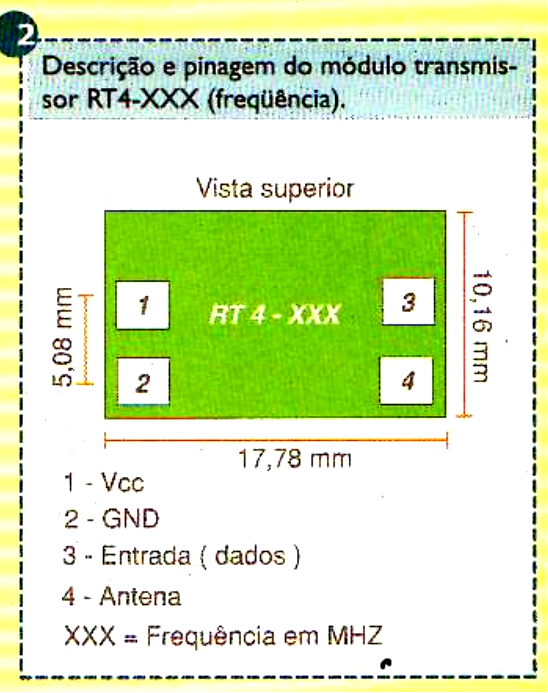
Os módulos Telecontrolli para RF são uma verdadeira "mão na roda" quando o assunto é RF. Estes módulos não requerem nenhum tipo de regulagem (bobinas, trimmers, trimpots, etc) e seu uso é direto (todos são regulados de fábrica). São preparados para operar em frequências "altas" (de 300 a 400 MHz) e o formato da transmissão/recepção dos dados é digital (bits, bytes, words).
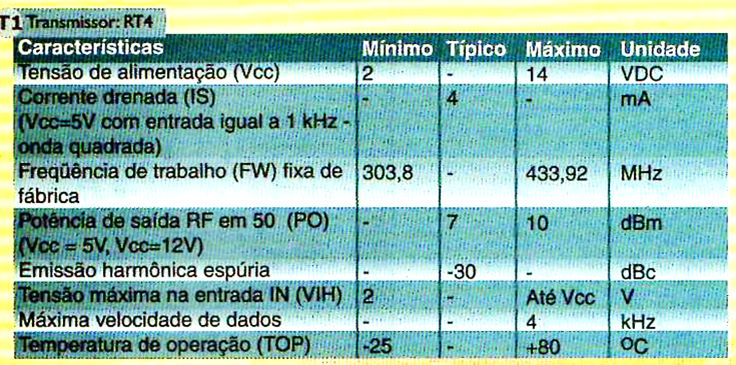
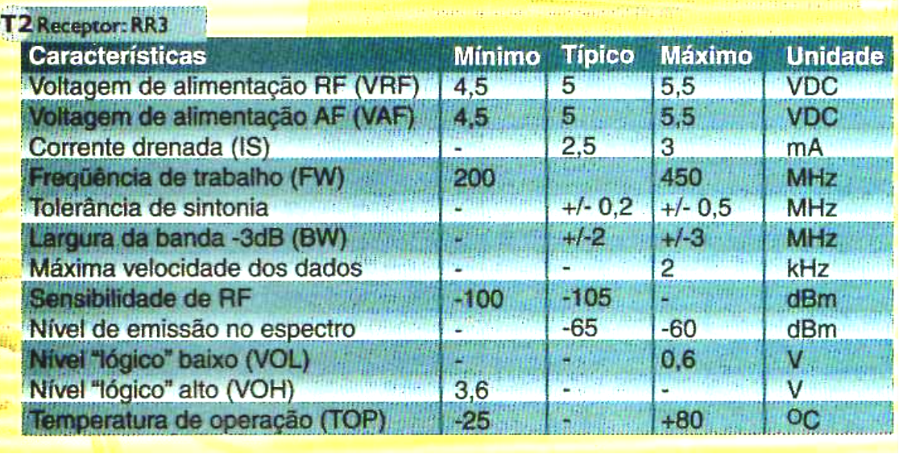
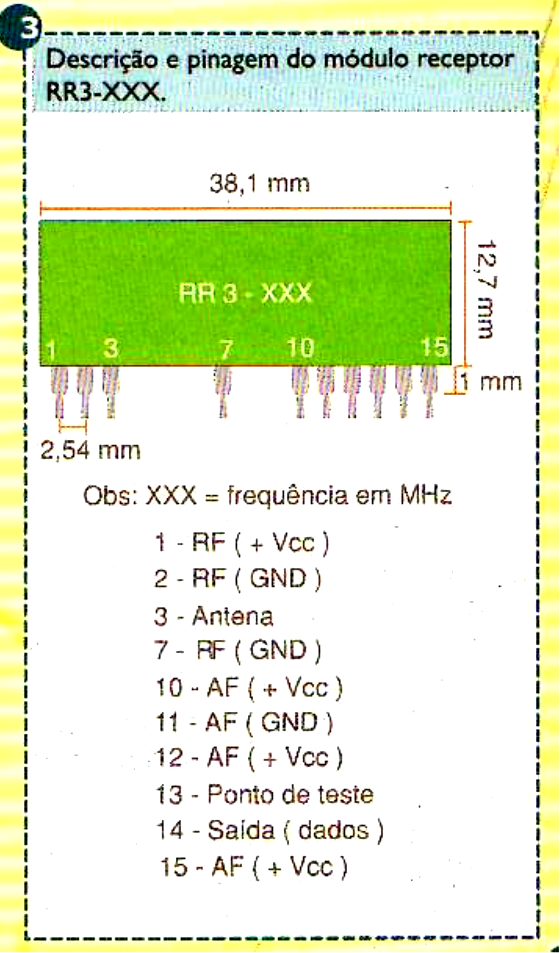
Os módulos que vamos utilizar no projeto do Robô RF são o transmissor RT4 e o receptor RR3 da Tellecontrolli, representada no Brasil pela ACG (www.acg-ts.net/br).
O leitor deve ter notado que um módulo transmite e o outro recebe. Porém, é possível preparar um sistema com comunicação "bidirecional" (full-duplex) utilizando dois pares de módulos, com frequências diferentes para cada par. Essa aplicação é ideal para um robô comandado via RF, mas que necessite transmitir dados de sensores ou outros equipamentos para quem o comanda.
ENCODERS E DECODERS
Na figura 4 o leitor tem as imagens, além das pinagens do encoder MC145026 e do decoder MC145027, ambos da Motorola. O MC145026 é capaz de "codificar" nove linhas de informação (cinco para endereços e quatro para dados) e enviá-las serialmente. Estas linhas podem ser codificadas de maneira "trinário" ("1", "0" ou aberto) ou "binária" ("1" e "0").
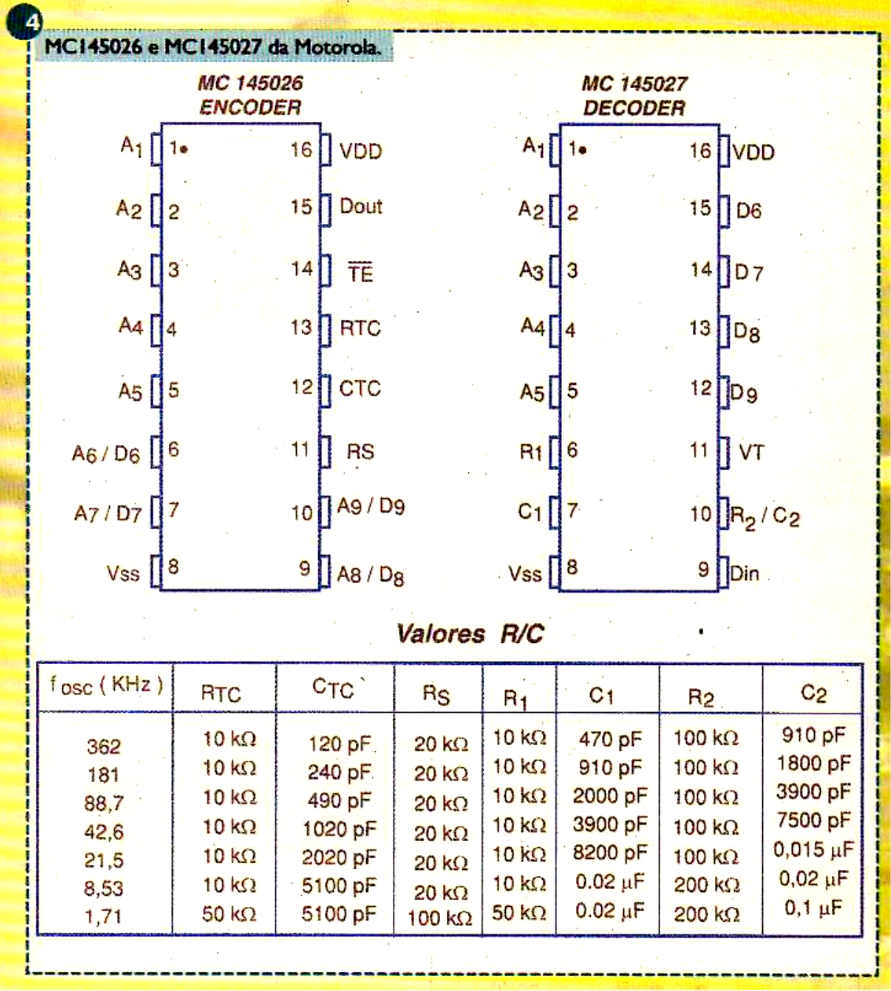
O MC145027 decodifica os dados enviados serialmente pelo MC145026. Neste Cl os dados são "inseridos" serialmente e dispostos nas quatro linhas de dados presentes. Com estes Cls é possível trabalhar com até 19683 combinações no modo "trinário" (39=19683) e até 512 combinações no modo "binário" (29=512).
O uso destes Cls é bem simples. Para que o decodificador MC145027 atue corretamente é necessário que o mesmo esteja ajustado para responder ao código programado no encoder. A linha de endereços e dados de ambos os Cls devem ser setadas da mesma maneira.
Um outro ponto importante é o sincronismo. Para isso os Cls possuem redes de temporização formadas por resistores e capacitores. Ambas as frequências devem ser iguais. Esta frequência também será a responsável pela velocidade (taxa) de transmissão/ recepção dos dados. É importante que esta esteja dentro da taxa máxima do sistema de transmissão e recepção.
A transmissão e recepção dos dados podem ser feitas através de fios, infravermelho ou radiofrequência, dependo apenas da aplicação em questão.
MÓDULO "DRIVER"
Para controlar um motor precisamos de uma etapa de potência e para isso existem alguns pontos a se observar, como:
- tensão e corrente de alimentação do motor;
- tensão de excitação do elemento "driver";
- tensão e corrente máxima suportada pelo elemento "driver" (transistor, CI, relé, etc);
- tensão e corrente necessária para "ligar" o elemento driver,
- frequência máxima de operação do driver (PWM);
- entre outras.
O leitor acostumado a ler com frequência a Revista Mecatrônica Fácil, já viu muitos circuitos para controle de motores DC. Uns construídos com reles e outros com transistores.
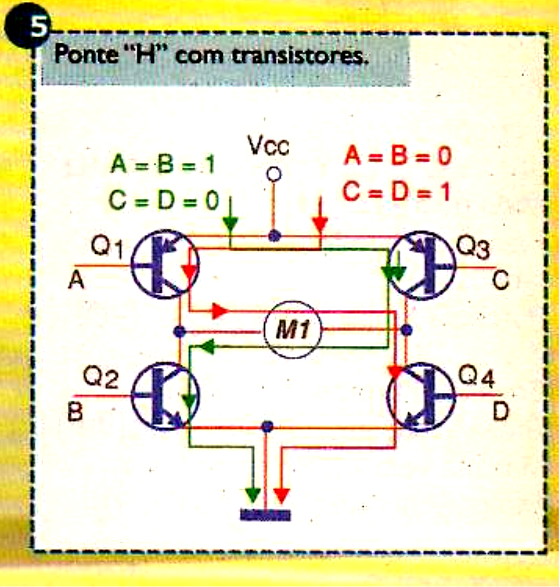
Dentre esses circuitos, o mais famoso é, sem dúvida alguma, a "Ponte H" (figura 5). Esse circuito já foi amplamente detalhado em edições anteriores. Um ponto de partida para uma pesquisa mais detalhada é o artigo de Newton C. Braga "Pontes H", publicado na edição n° 4 de maio/junho de 2002.
O Cl LM293D (figura 6), presente no projeto deste artigo, contém quatro drivers internos que permitem controlar até quatro motores em um único sentido ou dois motores nos dois sentidos (horário e anti-horário) ou ainda um motor de passo unipolar. As "portas" (drivers) deste Cl trabalham com tensões até 36 V e corrente máxima de 600 mA por porta,
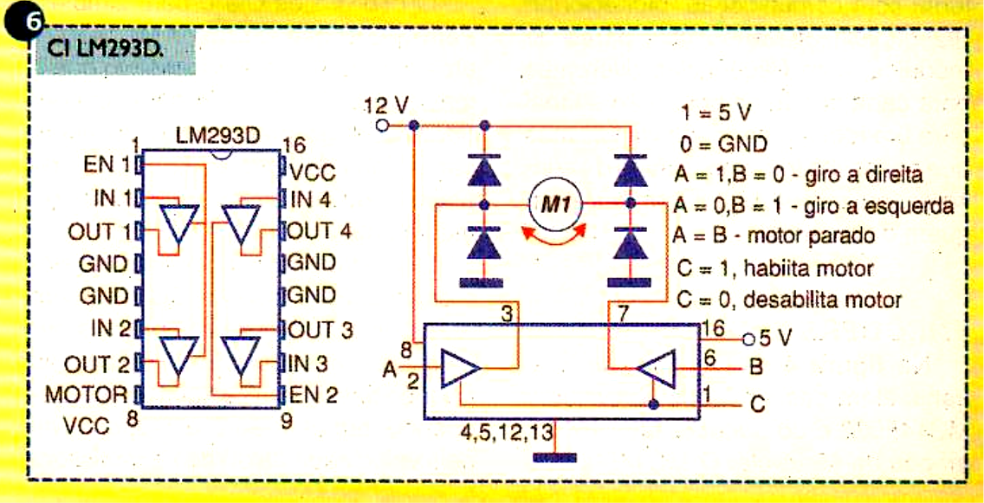
A excitação destas portas é feita com nível TTL (5 V), o que garante a compatibilidade com os microcontroladores atuais.
Ao escolher um motor verifique se a corrente do mesmo não ultrapassa a corrente máxima permitida pelo Cl. A dissipação máxima é de 4 W e o leitor deve estar atento a isso. Dependendo da aplicação pode ser necessário "adaptar" no Cl um dissipador de calor.
OS CIRCUITOS
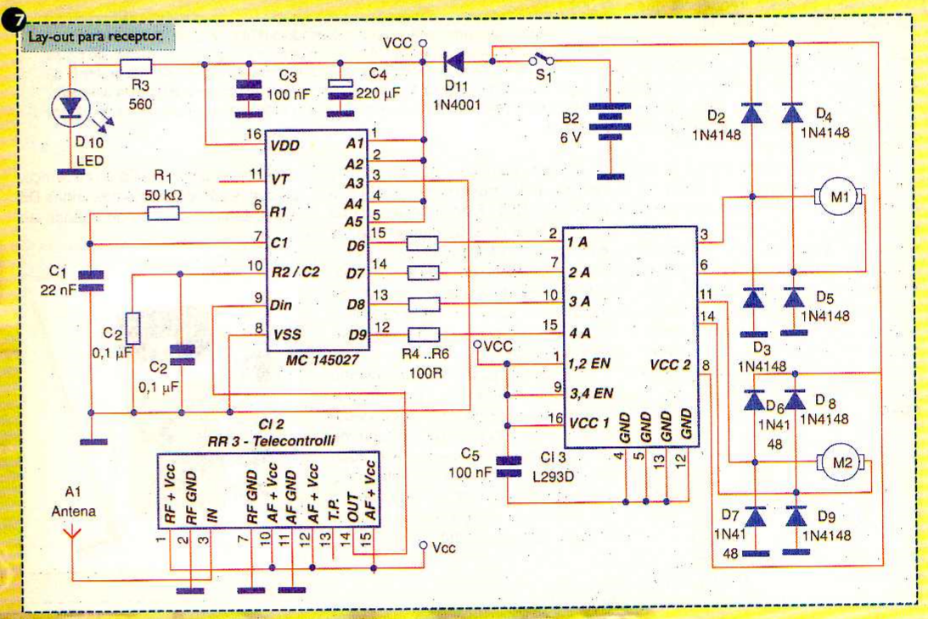
A figura 7 mostra o circuito do receptor e a figura 8 o circuito do transmissor para o Robô RF
Transmissor
Estão presentes no circuito apenas o encoder, o módulo RT4-315 (frequência utilizada no nosso protótipo), alguns diodos, resistores e capacitores, além é claro das chaves e pilhas. Os resistores R1, R2 e o capacitor C1 formam a base do oscilador do encoder. Esta frequência é da ordem
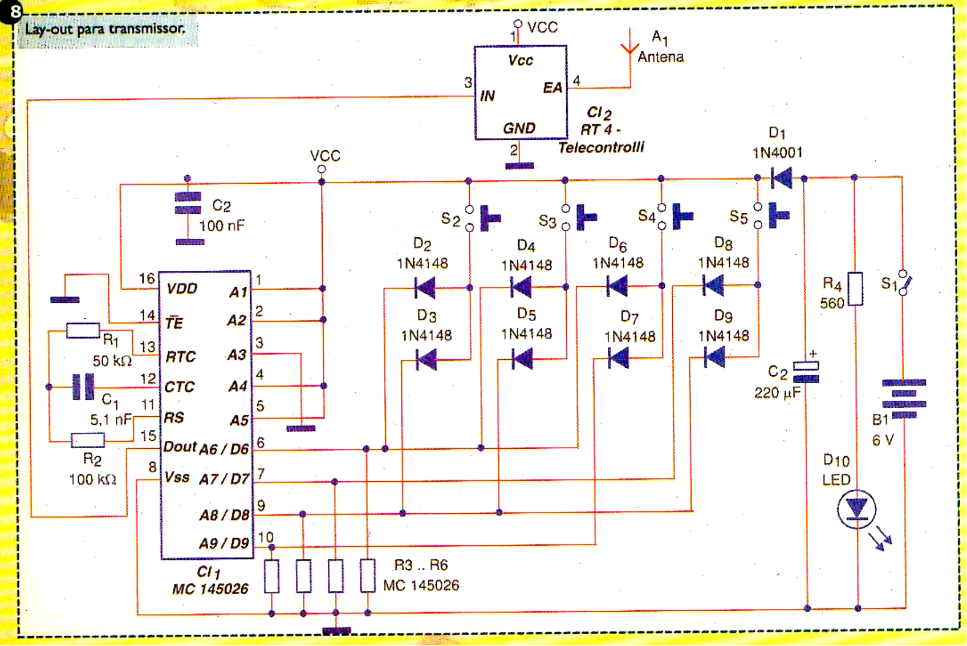
Esta frequência é da ordem de 1,71 kHz (é nesta frequência que os dados serão transmitidos). Se o leitor observar na descrição do módulo RT4 verá que a largura máxima de banda é de 4 kHz, portanto a velocidade de transmissão dos dados está dentro da faixa admissível (ponto importante a se observar).
Estes dados são formados pelos diodos D2 a D9 ligados à linha de dados (D6...D9), ligadas ao terra pelos resistores R3 a R6 (resistores "pull-down"). A presença dos resistores serve para manter o nível lógico baixo (0) na linha de dados. Assim, sem que nenhuma chave seja pressionada, o dado "0000" é transmitido continuamente, mantendo o robô parado! Somente com uma das chaves pressionadas o dado (bits) é alterado. A tabela 3 mostra esta relação.
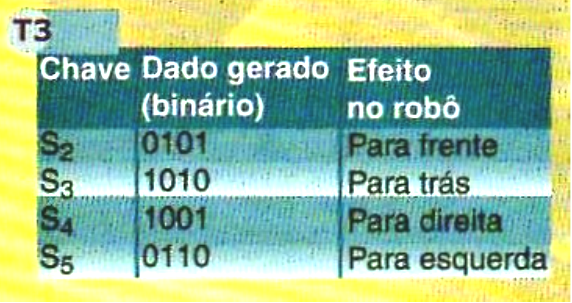
É possível associar os movimentos pressionando duas chaves ao mesmo tempo. Por exemplo, é possível ir "para frente e para direita" ao mesmo tempo pressionando S2 e S4 juntas. O leitor deve perceber que os movimentos "para esquerda e para direita" e "para frente para trás" ao mesmo tempo, são "fisicamente" impossíveis.
O encoder soma o dado gerado mais o endereço "11011", selecionado no circuito através das linhas A1 a A5, e o entrega serialmente ao módulo RT4.
O diodo D1 foi introduzido no circuito para provocar a redução da tensão de alimentação de 6 V para 5,3 V, dentro da faixa de trabalho do módulo RT4 e do encoder MC145026.
O capacitor C1 "desacopla" Cl1 e C2 serve como filtro para o circuito.
Receptor
Analisando o receptor através da figura 7, percebemos ter apenas dois Cls mais o módulo RR3-315 (mesma frequência do módulo RT4), alguns diodos, resistores e capacitores.
Nota:
A tensão de alimentação máxima do módulo RT4 é de 12 VDC e do MC145026 de 18VDC. Ou seja, é possível alimentar o circuito em questão com até oito pilhas (12 VDC) garantindo maior alcance devido ao aumento significativo da potência de saída na antena. O leitor que desejar maior alcance poderá fazer esta alteração, bastando acrescentar mais quatro pilhas em série com as já presentes no projeto original.
Vamos começar a análise do circuito pelo módulo de recepção RR3-315 (Cl2). Este módulo recebe os dados digitais serialmente e os entrega ao CI1 MC145027.
A frequência de oscilação deste é a mesma do encoder utilizado no transmissor: 1,71 kHz. A oscilação é feita pelos resistores R1, R2 e os capacitores C1, C2.
A decodificação do dado recebido é feita comparando a linha de endereços configurada no circuito do decoder, com os bits recebidos referentes ao endereço configurado no circuito do encoder. Como o leitor nota, mais uma vez o endereço configurado no encoder deve ser o mesmo configurado no decoder, sempre.
Após a comprovação do endereço, os dados são dispostos nas linhas D6 a D9. Estas linhas estão ligadas ao Cl3, um LM293D. Note que as entradas das pontes determinam o movimento e o sentido do motor. Veja a tabela 1 e compare-a com o demonstrado na figura 6.
Considerações sobre a antena
Todo sistema RF que se preze precisa de uma boa antena. No caso dos módulos Telecontrolli o fabricante recomenda o tipo "Whip" (chicote). Ela nada mais é que um pedaço de fio de cobre com comprimento igual a 1/4 do comprimento da onda. Para calcular sua antena, dependendo da frequência do seu módulo Telecontrolli, utilize a seguinte fórmula.
L(cm) = 7500 / Freq.(MHz)
Como exemplo, vamos calcular a antena para os módulos com frequência igual a 315 MHz.
L = 7500 / 315
L = 23,8
Portanto, a antena para o receptor e transmissor, operando a 315 MHz, deverá ter 23,8 cm de comprimento.
Na montagem, o leitor poderá utilizar um pedaço de fio de cobre rígido no comprimento adequado (de acordo com os cálculos obtidos para a frequência de trabalho) soldado diretamente na placa ou mesmo uma antena do tipo telescópica. O grande problema será encontrar uma no comprimento calculado, tarefa quase impossível. Porém, existe uma solução. Adquirir uma antena maior que a calculada e "esticá-la" para o uso apenas o comprimento necessário.
MONTAGEM ELETRÔNICA
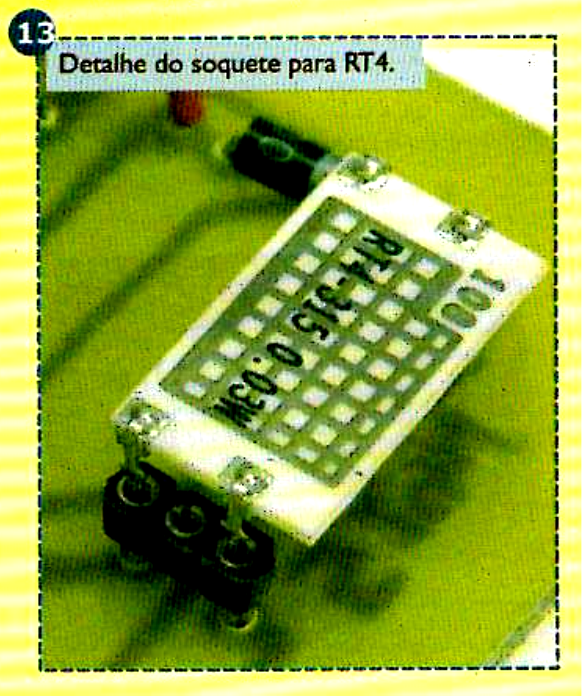
Comece por montar o transmissor (figuras 9 e 10). Use um soquete para Cl1 e também para o módulo RT4. Para este último, o leitor terá de fazer algumas adaptações com um soquete qualquer (figura 13). Detalhe do soquete para RT4.
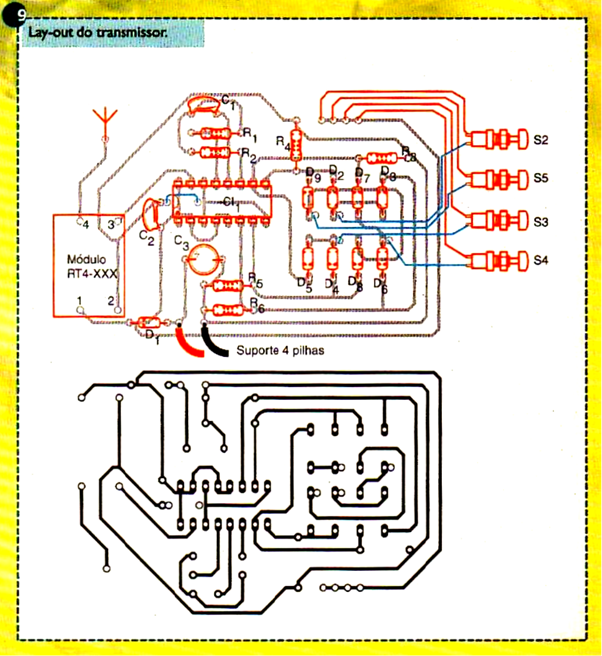

Solde os diodos com cuidado para não inverter nenhum. Observe atentamente a figura 9 para o sucesso da montagem. O capacitor C2 é polarizado e também não deve ser invertido.
Caso o leitor não encontre um resistor no mercado especializado com valor de 50 kΩ (R1), poderá implementá-lo soldando dois resistores de 100 Id2 em paralelo. O capacitor C1 de 5,1 nF também pode ser improvisado a partir de dois de 10 nF soldados em série. Para exemplificar isso, preferimos adotar esta configuração em nossa montagem. Veja a figura 14.
Use chaves tipo "push-button" normalmente abertas para S2, S3, S4 e S5, e uma chave liga/desliga comum para S1.
Em nossa montagem utilizamos uma caixa Patola código PB 112 para o transmissor. Na figura 15 o leitor pode ver a distribuição da placa, suporte de pilhas e a antena no interior desta e na figura 16 o transmissor montado, fechado e decorado, pronto para o uso.


A montagem do receptor é bem simples e os mesmos cuidados tomados na montagem do transmissor também devem ser considerados nesta etapa (figura 11 e 12).


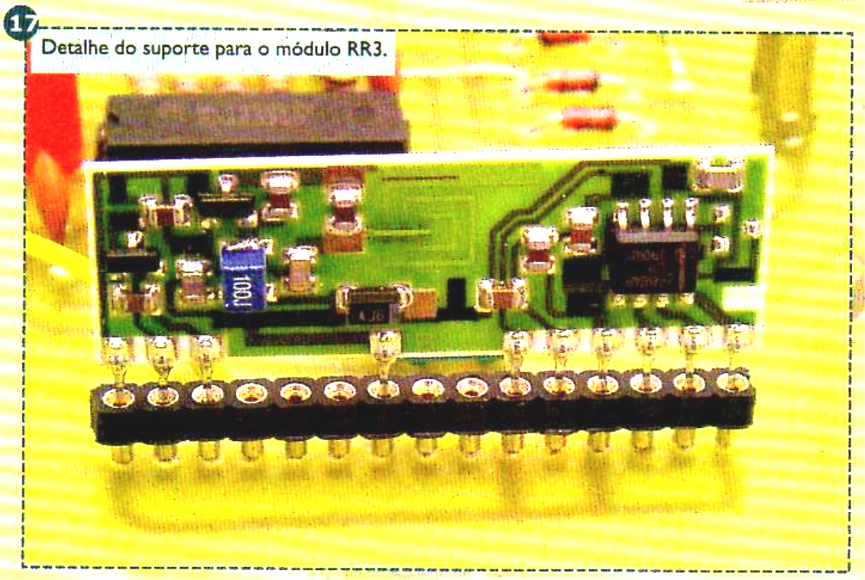
Use soquetes para os Cls. Para o módulo RR3 o leitor deverá utilizar um soquete para CIs adaptado para tal (figura 17). Evite soldar qualquer um dos módulos diretamente na placa!
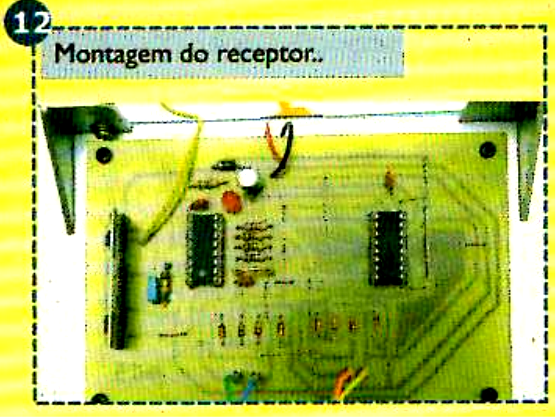
Tenha cuidado ao soldar os componentes polarizados como os diodos, LEDs e capacitores. Redobre a atenção ao soldar os diodos D2 a D9. Qualquer inversão aqui pode ser fatal para CI3 e até mesmo para a placa como um todo! Muita atenção!
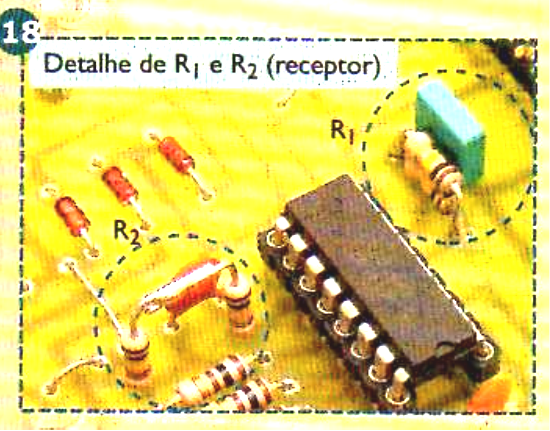
Aqui também improvisamos R1 (50 Ω) e R2 (200 Ω). Para obter R1, use dois resistores de 100 Ω ligados em paralelo e para R2 dois resistores de 100 kΩ/ ligados em série. Veja a figura 18.
Os motores podem ser ligados diretamente à placa, soldando diretamente seus fios ou podem ser ligados utilizando conectores do tipo encaixe ou mesmo parafusáveis. A escolha é livre.
MONTAGEM MECÂNICA
Para os leitores que desejam montar o chassi do Robô RF, demonstrado na capa, a montagem mecânica está descrita no artigo de Francci Junior, presente nesta revista.
Já para os leitores que preferem uma montagem mais "alternativa", sugerimos uma releitura nos artigos "Robô IR", edição n° 11 de Julho/ Agosto de 2003 e "Robô PIC", edição n° 13 de Novembro/Dezembro de 2003. O leitor notará que com o mesmo chassi, é possível montar o Robô RF. Claro que os incrementos visuais ficam por conta de cada um. O que importa aqui é usar a criatividade!
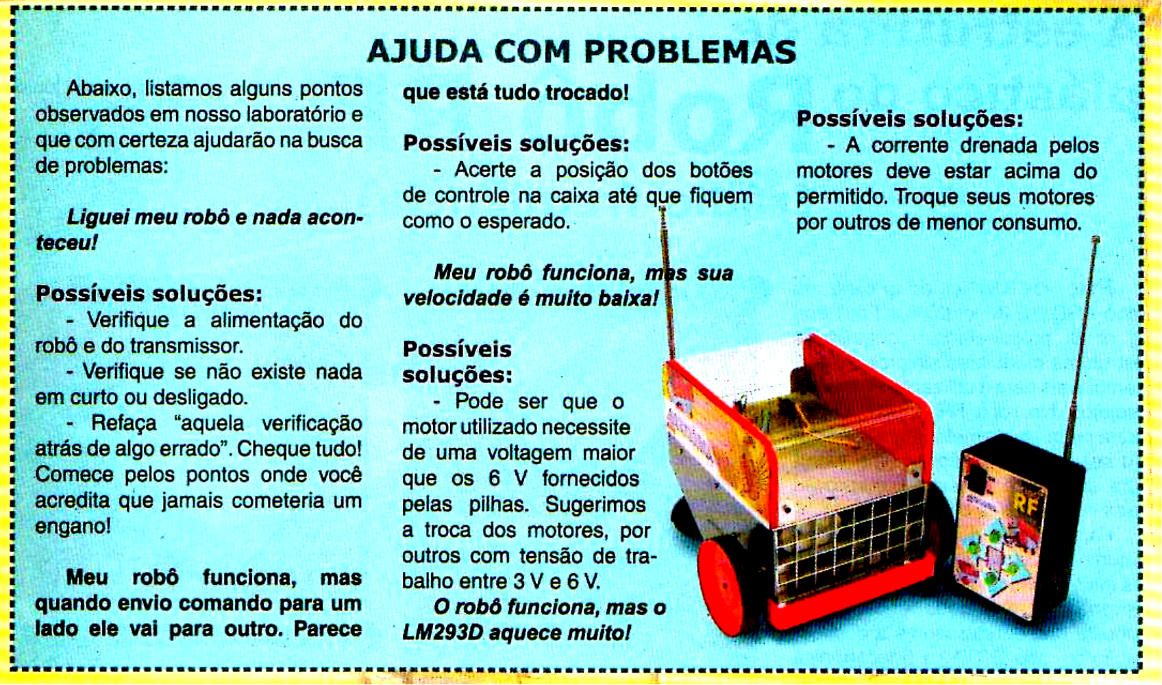
TESTE E USO
Sugerimos ao leitor que antes de ligar qualquer parte do Robô (transmissor ou receptor) faça uma verificação minuciosa e cuidadosa sobre ambas montagens. Verifique pelas figuras e fotos, presentes neste artigo, se está tudo "ok" com sua montagem, se nenhum componente foi invertido ou mesmo trocado.
Tenha calma ao fazer isso! Não se apresse em ligar o Robô! Alguns minutos cedidos a uma boa verificação podem poupar dores de cabeça futuras!
Após "aquela verificação", você já pode ligar o transmissor e o receptor. A "ordem dos fatores" aqui não altera o produto! O robô deverá ficar parado. Aperte um dos botões e observe se o robô faz o movimento correto. Se não fizer, verifique se as chaves não estão trocadas de posição.
O uso de pilhas médias ou grandes é melhor que pequenas. Aumenta-se assim o tempo que o robô pode operar. Pilhas alcalinas também podem aumentar ainda mais o tempo de operação.
CONCLUSÃO
Neste artigo, o leitor aprendeu a montar um robô controlado através de sinais de rádio. Estamos vivendo um momento histórico com os robôs "Spitit e Oportunit" (da NASA) que estão em Marte, e são controlados por "Radiofrequência". Guardando as devidas proporções, o leitor pode pensar em alguma aplicação parecida para o seu Robô RF. Nas próximas edições abordaremos um pouco mais os "Robôs Comandados à Distância" e demonstraremos ao leitor como "ir mais longe" com seu Robô RF! Boa montagem e até lá!