Em nossa série sobre o microcontrolador PIC Microchip (*), discorremos sobre alguns dispositivos de controle encontrados no mundo da robótica e automação, como: motores DC, "leds", relés, "displays", motores de passo, servos e outros. Também prometemos que traríamos até o leitor a montagem de um robô com o PIC. E é exatamente isso que faremos neste artigo. Explicaremos a construção de uma placa com o microcontrolador PIC que controlará nosso Robô PIC e que, com pequenas modificações, poderá controlar outros processos em automação. Confira!
Nosso pequeno robô PIC utiliza reles para controlar dois peque-nos motores para sua movimentação e duas chaves como "Bumper's" (sensores de contato) para realizar o desvio dos obstáculos. A lógica é bem simples e foi escolhida por facilitar o entendimento da aplicação do microcontrolador PIC como "cérebro" de um pequeno robô.
O robô sempre se move para frente. Ao encontrar um obstáculo ele realiza um desvio, primeiro retrocedendo para ter espaço para o movimento e depois realizando um desvio para o lado contrário ao toque (chave). Um outro ponto muito interessante nesse robô é o reaproveitamento de materiais. Estamos falando do chassi do robô. Na edição n°11 (Julho/Agosto de 2003) da Mecatrônica Fácil, mostramos um outro robô: o Robô IR (figura 1). Sua montagem foi feita com a ideia do reaproveitamento de materiais. Essa ideia tem sua base fundamentada num conceito muito simples e bem conhecido da maioria dos estudantes e "hobistas" brasileiros na área de mecatrônica/robótica: a economia de recursos. Então, pensando nisso, reutilizaremos o chassi de nosso robô IR aqui neste artigo. Assim, o leitor' que montou o Robô IR terá um custo bem pequeno na montagem deste robô e, após os testes, se desejar ter ambos montados poderá realizar a montagem de mais um chassi.
Esse chassi foi construído com material alternativo barato e facilmente encontrado em papelarias: uma prancheta "plástica" (figura 2). É claro que dependendo da região talvez uma prancheta plástica não possa ser encontrada, porém qualquer outra pode ser utilizada. O leitor pode, por exemplo, usar uma em acrílico ou mesmo em madeira para substituir a de tipo plástico. Mais à frente, o leitor encontrará o esquema e medidas para a montagem do chassi.

A PLACA
Para o controle do Robô PIC, desenvolvemos uma pequena placa com quatro relés independentes e duas chaves também independentes. Isso foi feito para permitir, futuramente, o reaproveitamento desta placa em outros projetos tais como:
- Alarmes
- Pequenos CLPs
- Automação residencial com LOGO
- Entre outras aplicações.
Como o leitor, pode ver, a placa permite muitas outras aplicações, além do controle do nosso robô (em futuras edições trataremos mais a respeito).
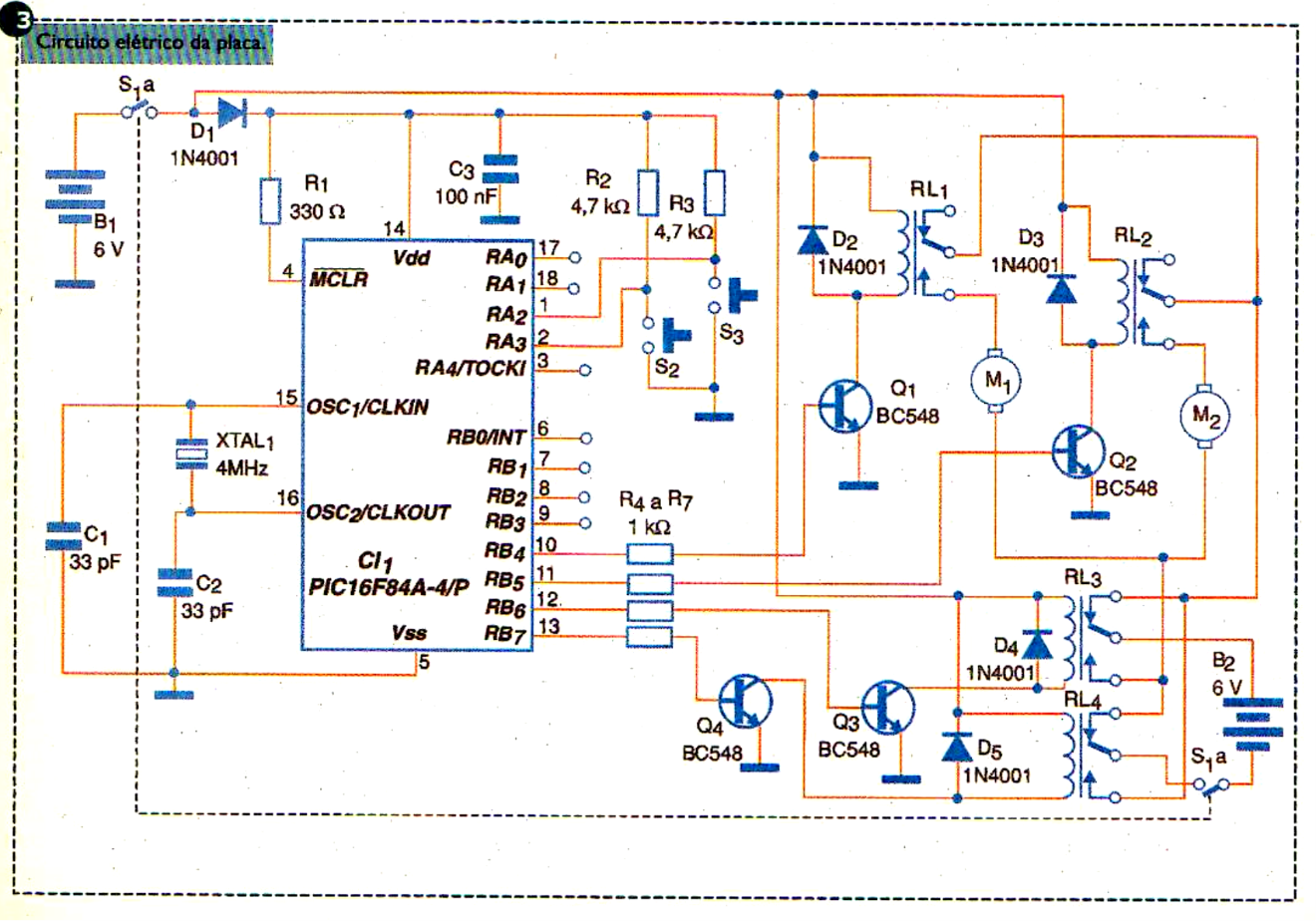
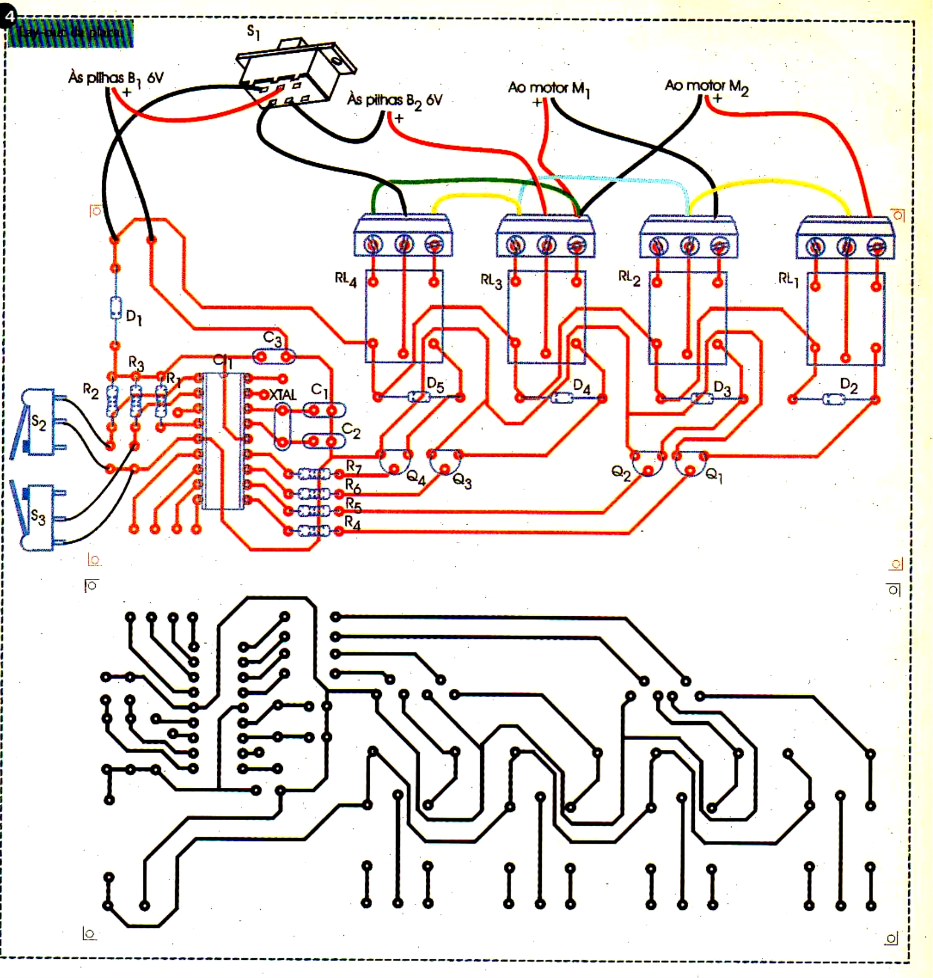
Na figura 3, o leitor tem o circuito elétrico da placa de controle do nosso Robô PIC. Ela não traz novidade alguma para aqueles que estão acompanhando nossa série. Podemos ver o PIC16F84A como "cérebro" do nosso circuito e ligado a este, duas pequenas chaves (S2 e S3), utilizadas como sensores de contatos, além de quatro relés (RL1 a RL4) que realizam o controle sobre os motores.
Os relés RL1 e RL2 executam o "ligar/desligar" dos dois motores do robô. Os relés RL3 e RL4 realizam juntos a inversão da polaridade da bateria para os motores, permitindo assim a reversão dos mesmos.
Para a alimentação do circuito optamos por dois conjuntos de pilhas independentes, um para o microcontrolador e outro para os motores. Assim isolamos totalmente nosso circuito dos motores, evitando possíveis interferências geradas pelos mesmos.
O leitor deve ter notado o diodo D1. Este diodo está presente no circuito para realizar uma queda de tensão para que o valor se aproxime dos 5 V requeridos pelo microcontrolador PIC. Este diodo não deve ser omitido do circuito e nem substituído por outro, que não o indicado na lista de materiais.
MONTAGEM ELÉTRICA
Na figura 4 damos uma sugestão para o "lay-out" da placa de circuito impresso. O leitor também poderá construir o circuito em uma placa padrão se achar mais conveniente, ou mesmo realizar a montagem em uma matriz de contatos. A escolha é livre e para as duas últimas alternativas, os procedimentos necessários ficam por conta de cada um.
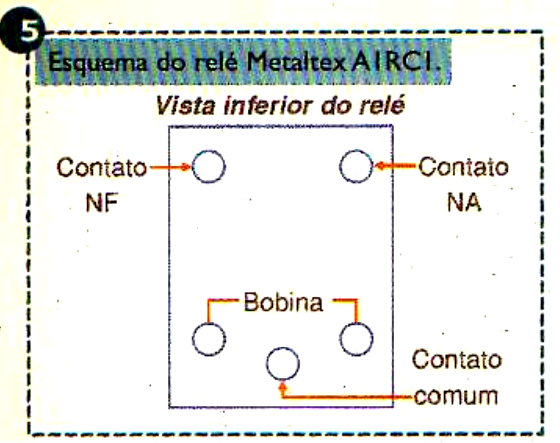
Os relés utilizados são da Metaltex, código A1RC1 - 6V, com tensão de bobina para 6 volts. Porém o mercado oferece muitos outros relés, de outros fabricantes, também com tensão de bobina de 6 V com pinagem exatamente igual. Na figura 5 oferecemos o diagrama do relé usado para que o leitor possa comparar com outros, caso não seja possível encontrar o recomendado no mercado local. Comece por soldar os resistores e capacitores cerâmicos. Tome cuidado para não trocar os capacitores C1, C2 e C3. Eles possuem valores diferentes (C2 é igual a C3, mas ambos são diferentes de C1). Atenção ao soldá-los. Solde os transistores de acordo com o "lay-out" oferecido. Estes componentes são polarizados e não devem ser ligados de forma invertida, caso contrário o robô não funcionará. Use um soquete de Cl para o PIC.
Evite soldá-lo diretamente na placa mesmo após a sua gravação. Esta não é uma prática recomendável. Os diodos também são polarizados e para soldá-los corretamente basta seguir a figura 4 na "vista dos componentes".
Solde os relés e o cristal. Solde os conectores tipo "borneiras" para os relés. Estes conectores facilitam a ligação de fios pois permitem que os mesmos sejam parafusados nestes.
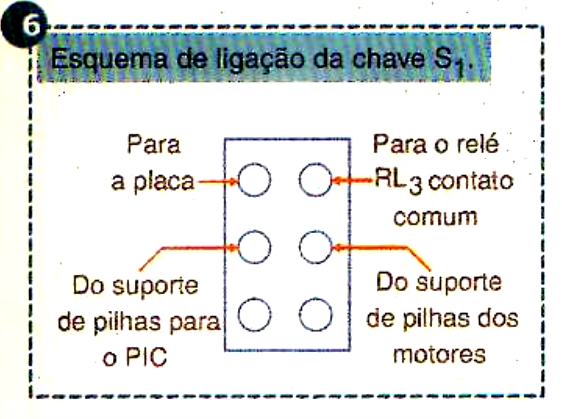
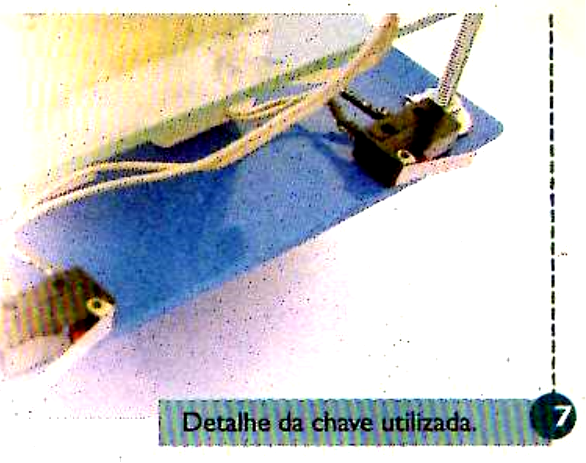
A chave S1 é uma chave do tipo "H-H" dupla e a figura 6 demonstra como ligá-la corretamente. As chaves S2 e S3 (sensores de contato) são do tipo "push-buttons" normalmente abertos. Em nosso protótipo optamos por usar duas chaves com alavanca utilizadas em alarmes. O leitor pode ver a mesma na figura 7 com mais detalhes.
Após finalizar a montagem, revise todas as ligações, não tenha pressa. É preferível perder alguns minutos agora do que a paciência ao ver seu projeto não funcionar. Verifique se todas as soldas foram feitas, se nenhum componente foi trocado e se não houve qualquer inversão daqueles que são polarizados (diodos, transistores, PIC, etc).
MONTAGEM MECÂNICA
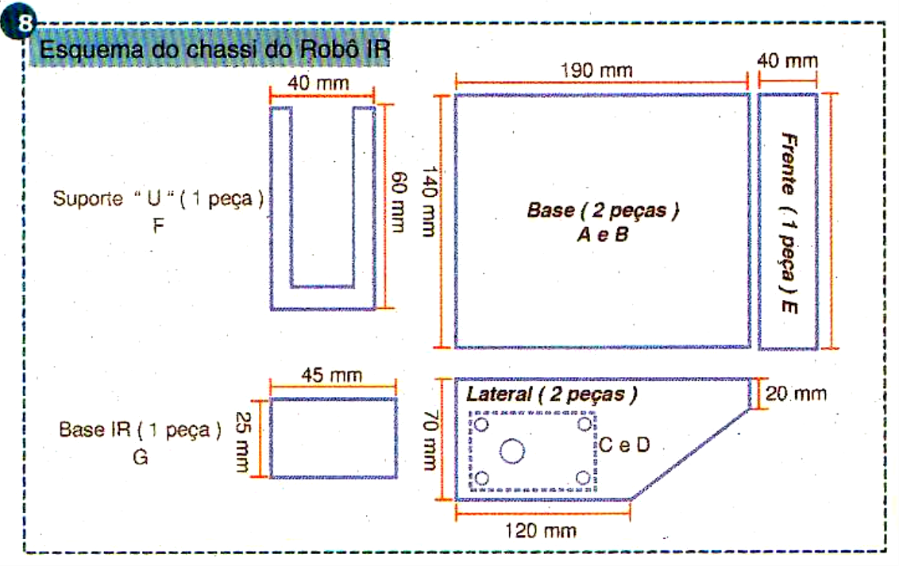
Como dissemos mais atrás, nosso chassi foi reaproveitado de um outro robô. Porém, na figura 8 o leitor tem o esquema e medidas do chassi original. As peças "C" e "D" são necessárias apenas se o leitor for utilizar em seu projeto caixas de redução que são presas de forma "lateral". A peça "E" vai à frente do robô e ajuda a dar firmeza ao conjunto "AB"+"C"+"D". As outras peças não serão usadas, pois fazem parte da montagem do Robô IR (maior informação vide artigo na edição n°11)
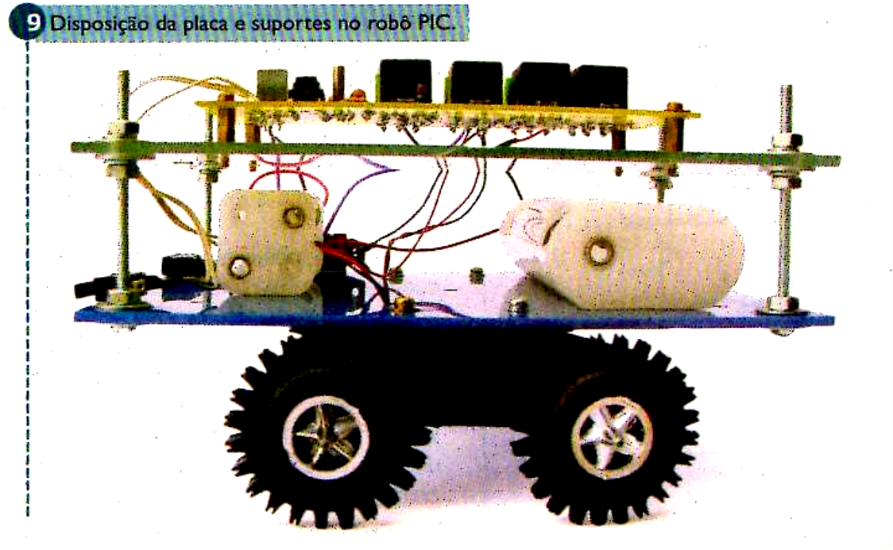
No Robô IR empregamos dois suportes para quatro pilhas pequenas alotados na parte de baixo do chassi, pois tínhamos uma placa de controle para o motor na primeira base (azul) e a placa "cérebro" na segunda base (transparente). Como nosso Robô PIC possui apenas uma única placa para o controle dos motores e o cérebro, podemos alojar os dois suportes de pilhas na primeira base (azul) e a placa de controle na base superior (transparente). Observe a figura 9, ela demonstra a disposição da placa e suportes de pilha. A chave Si foi presa ao chassi com auxílio de "cola quente", porém o leitor poderá utilizar outro tipo de adesivo qualquer a sua disposição.
O uso de parafusos também é possível. As chaves S2 e S3 também foram presas com o adesivo mencionado e as mesmas devem ser fixadas à frente do chassi de maneira a permitir o contato com os obstáculos. Sem isso, o robô não realizará os desvios necessários. A altura das mesmas no chassi deve ser feita de acordo com o ambiente em que o robô será testado. Verifique a altura dos obstáculos para saber se a altura escolhida para as chaves permitirá a atuação destas.
O leitor poderá também aumentar a área de atuação ou mesmo distância com o acréscimo de um arame de aço, por exemplo, nas alavancas das chaves. Assim o robô poderá detectar melhor os obstáculos, ou mesmo a uma distância maior. Uma outra ideia é reaproveitar o que já demonstramos aqui nesta revista. O Robô ADR – 1 (MEC530), utilizava um arame torcido em forma de arco (figura 10) para realizar a detecção dos obstáculos. O leitor poderá então, utilizar um arame neste formato ligado as chaves S2 e S3. Use cola quente ou outro adesivo para a fixação.
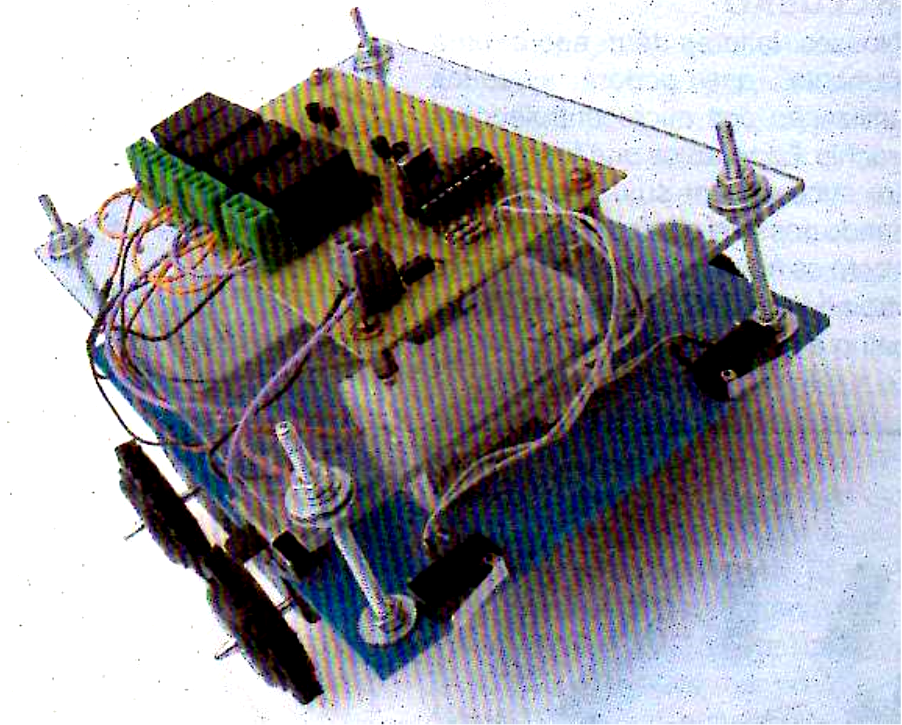
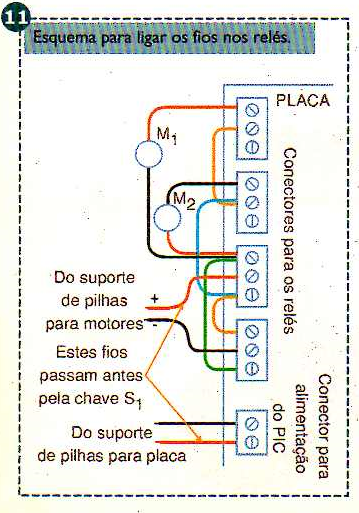
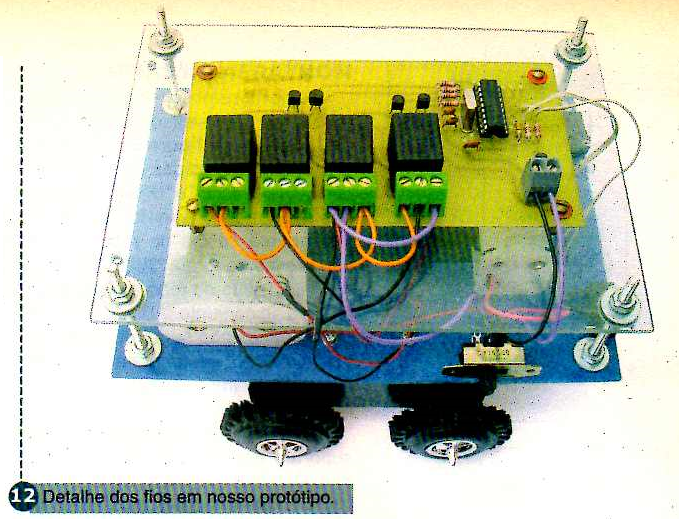
Fixe a placa com parafusos. O emprego de espaçadores é recomendado. Estes espaçadores podem ser construídos com tubo de caneta ou mesmo comprados no mercado especializado. Não use cola quente ou outro adesivo para fixar a placa. De preferência a fixação com parafusos. Agora é possível ligar os fios de conexão dos relés, motores e suporte de pilhas para os motores. Na figura 11 temos um esquema para as ligações e na figura 12 uma foto com o detalhe das ligações de nosso protótipo. Para facilitar os contatos, estanhe as pontas dos fios, antes de parafusá-los nas "borneiras tipo parafuso" (conectares).

O PROGRAMA
No site http://www.arnerobotics.com.br/eletronica/robotica/robo_pic.htm , é possível fazer o "download" do programa para o Robô PIC para gravar seu microcontrolador. O leitor que ainda não tem um gravador para microcontroladores PIC, poderá realizar a montagem do PROGPIC II proposto nesta edição (maiores detalhes no referido artigo).
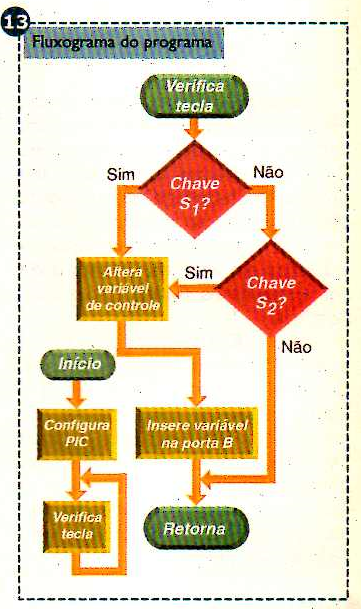
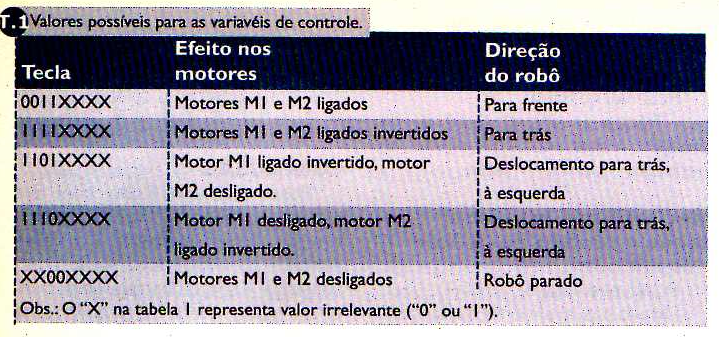
Na figura 13 temos o fluxograma do programa e acompanhando o código-fonte do mesmo, é possível entender seu funcionamento. O programa foi extensamente comentado para facilitar a sua compreensão. O programa inicia as diretrizes de pré-compilação e variáveis. Em seguida o microcontrolador é configurado (direção dos pinos, interrupções, etc). Na rotina "LOOP" o programa realiza a leitura das teclas. Se qualquer tecla for pressionada, é inserida a variável de controle na parte mais significativa da porta B. Esta variável de controle é composta por RL1 a RL4 no programa. A tabela 1 descreve como isso é feito.
Assim, quando uma chave é pressionada o robô pode realizar o movimento necessário. Aconselhamos um estudo atento ao programa para a compreensão máxima de seu funcionamento.
TESTE E USO
Insira as pilhas em seus respectivos suportes. Ligue o robô através de S1. Dê um toque em uma das chaves. Repare como estão os movimentos. Se tocar a chave esquerda, o desvio deverá ser: ré e para a direita. Se tocar a chave direita o desvio será: ré e para a esquerda. Somente após executar os movimentos de desvio que ele continuará movendo-se sempre à frente buscando novos obstáculos.
Se seu robô parece não se comportar bem, mais à frente o leitor encontrará uma "ajuda com problemas". Procure ler esse item atentamente.
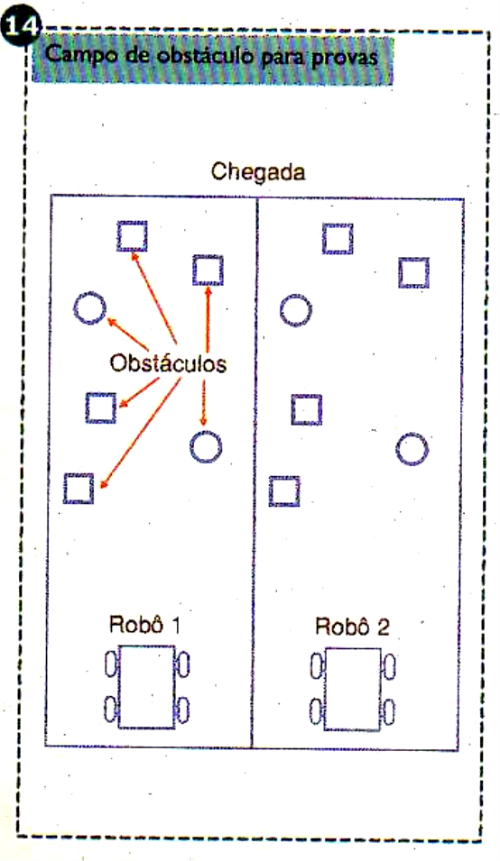
Uma sugestão de uso pode ser uma prova entre duas ou mais equipes, conforme a figura 14. Prepara-se um "campo de obstáculos", dividido ao meio (os obstáculos devem ser iguais). Os robôs são ligados juntos em um dos lados do "campo de obstáculos". Vence o que chegar primeiro ao outro lado do campo. As equipes poderão definir motores iguais e permitir a alteração nos programas de maneira a fazer com que seu Robô PIC responda mais rápido ou execute desvios diferentes dos demonstrados neste artigo. O que vale mesmo é o desafio e a criatividade de cada um.
AJUDA COM PROBLEMAS
Abaixo listamos alguns pontos observados em nosso laboratório e que, com certeza, ajudarão na busca de problemas:
O robô não se move para a frente. Parece não funcionar.
Possíveis soluções:
- O programa pode não estar instalado no PIC. Procure gravá-lo novamente e execute novos testes.
- As pilhas podem estar invertidas. Verifique. - A ligação da chave S1 pode não estar correta. Verifique.
- A ligação dos reles pode não ter sido realizada corretamente. Reveja a figura e fotos presentes nesse artigo e verifique suas ligações.
- Os transistores Q1 a Q4 podem estar invertidos. Verifique.
Quando ligo o robô ele anda para trás, e não para frente.
Possível solução:
- Inverta a ligação de ambos os motores. Troque o positivo pelo negativo em ambos.
No meu robô, ao ligá-lo, um motor se move para frente e outro para.
Possível solução:
- Inverta as ligações do motor que parece se mover para trás. Troque o fio do positivo pelo negativo e vice-versa neste motor.
Ao tocar uma chave, ele parece realizar o desvio para o mesmo lado.
Possível solução:
- Troque as chaves S2 e S3 de posição. A que estava na direita vai para esquerda e vice-versa.
Meu robô não está invertendo o sentido de rotação dos motores.
Possível solução:
- Muito provavelmente as ligações entre os reles não estão corretas. Veja as ilustrações e fotos referentes a estas ligações nesse artigo e verifique as ligações de seu robô.
Todos os testes acima só podem ser considerados válidos se todas as etapas da montagem elétrica e mecânica foram feitas com cuidada .
CONCLUSÃO
Nosso primeiro Robô com um microcontrolador PIC Microchip é bem simples, porém muitas ideias novas surgirão e outros robôs serão apresentados. Esperemos que esta montagem tenha atendido aos anseios da grande maioria de nossos leitores, que desejavam um robô com microcontrolador a um custo baixo. Boa montagem e até a próxima.