









O aparelho que descrevemos, pode ser a usado no carro com dupla finalidade: medir a aceleração ou então medir a inclinação lateral do veículo ou ainda de uma ladeira. O circuito pode ser usado em robôs também. O importante, dado seu efeito luminoso com 5 LEDs, é que ele pode constituir-se num elemento adicional de decoração do painel do seu carro.
O componente básico U267BE já não pode ser encontrado com facilidade em nosso mercado, mas os leitores podem adaptar o projeto para funcionar como o LM3914.
Um tacômetro num automóvel mede a aceleração do motor que na verdade não é a aceleração (variação de velocidade) do veículo em si. Uma vez engrenado, a mudança da velocidade vai depender do peso do veículo e eventualmente do fato dele a estar ou não em estrada plana.
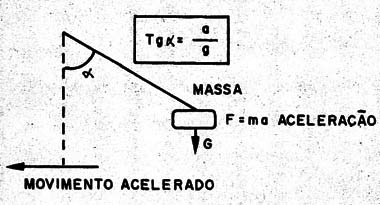
A medida da aceleração pode de uma maneira simples ser feita com um pêndulo conforme mostra a figura'1, onde a inclinação do fio determina a força que atua sobre o corpo na mudança de velocidade, o que sabemos corresponder à aceleração.
Para um ângulo de 45 graus, por exemplo, temos uma aceleração imprimida ao veículo igual à da gravidade.
Uma maneira simples de se medir a aceleração de um veículo, seria acoplar um pêndulo a um potenciômetro de modo a converter o ângulo que ele deflexiona em tensão, e depois aplicar esta tensão a um indicador qualquer, como um indicador de LEDs no nosso projeto.
É claro que, para um veículo parado, uma indicação da posição do pêndulo diferente de zero significa uma inclinação do terreno.
O circuito é bastante simples de montar e pode ser adaptado facilmente em qualquer veículo.
Características:
Tensão de alimentação: 12 V
Consumo: 20 mA
Número de LEDs: 5
COMO FUNCIONA
A base deste projeto é um indicador de barra móvel de 5 LEDs do tipo U267BE da SID Microeletrônica (ver observação no início do artigo), que não necessita de praticamente nenhum elemento externo a não ser a rede divisor de sinal e um capacitor de filtro de alimentação.
Contendo todos os elementos para acionamento dos LEDs com corrente constante, este componente garante brilho uniforme para a escala e pode funcionar com a alimentação de 12 V disponível da bateria de um carro.
No nosso projeto, um potenciômetro é o sensor. Acoplado a um pêndulo ele transforma variações de posição em variações de tensão.
O trimpot (P2) ligado em série com o sensor (P1), permite ajustar os limites da escala de modo que tenhamos uma faixa de atuação num ângulo menor do que todo o abrangido pelo giro do eixo do potenciômetro.
O capacitor C1 proporciona uma certa inércia ao circuito, evitando que os LEDs tremulem quando o pêndulo eventualmente oscilar em presença de irregularidades da pista. Este capacitor pode ser alterado, conforme o efeito desejado. Seus valores podem ficar entre 2,2 µF e 220 µF.
MONTAGEM
Na figura 2 temos o diagrama completo do aparelho.

Na figura 3 temos a disposição dos componentes numa placa de circuito impresso. Para o circuito integrado sugerimos a utilização de soquete DIL de 8 pinos.

Os resistores são de 1/8 W e os capacitores eletrolíticos devem ter uma tensão de trabalho de pelo menos 16 V.
Os LEDs podem ser de cores diferentes, por exemplo 2 verdes, 1 amarelo e 2 vermelhos.
O sensor consiste num potenciômetro a comum montado na posição mostrada na figura 4.

O pêndulo deve ter um peso que permita o movimento do eixo do potenciômetro com facilidade a qualquer mudança de velocidade do carro.
Prova e Uso
Para provar o aparelho, basta alimentá-lo. Girando o potenciômetro P1 e ajustando-se P2 deve-se obter uma faixa de posições em que temos de nenhum aos quatro LEDs acesos.
Na instalação os pontos de terra são ligados ao chassi do carro e a alimentação ode ser retirada de qualquer ponto da fiação do carro em que tenhamos 12 V.
O ajuste é feito de tal modo que na posição vertical do pêndulo não tenhamos nenhum LED aceso (ajuste a posição de P1 - corpo) para isso.
Depois, ajusta-se P2 para que tenhamos os quatro LEDs acesos com uma inclinação do pêndulo de aproximadamente 60 graus. Feito o ajuste é só usar o aparelho, lembrando que variações maiores de velocidade (acelerações) exigem mais potência do motor e portanto significam maior gasto de combustível.
Assim, usando sempre uma aceleração ponderada pode-se obter mais do motor com menor gasto de combustível.
Semicondutores:
Cl1 - U267BE - circuito integrado SID
LED1 a LEDS - LEDs comuns – ver texto
Resistores: (1/8 W, 5%)
R1 - 2,2 k Ω
R3 e R2 - 47 k Ω
P1 - 47 k Ω - potenciômetro
P2 - 47 k Ω - trimpot
Capacitores:
C1 - 2,2 µF - eletrolítico - ver texto
C2 - 1 000 µF - eletrolítico
Diversos:
F1 - 500 mA - fusível
Placa de circuito impresso, caixas para montagem, soquete para o integrado,
suporte de fusível, fios, solda etc.










