









Este circuito por nós proposto é um ótimo controlador para motores DC que pode ser empregado em rádio controle ou em pequenos robôs controlados por computador.
Com este driver você poderá controlar facilmente o giro de um pequeno motor, fazendo-o parar, girar num sentido ou em outro, com dois simples sinais de controle aplicados à entrada do dispositivo.
Devido a utilização de um circuito integrado CMOS como decodificador, podemos contar com três características importantes cm aplicações deste tipo, que são:
- Alta sensibilidade e impedância de entrada
- Alta imunidade a ruídos
- Ampla faixa de tensões de alimentação
Como podemos notar na figura 1, o controle do motor é feito por quatro transistores de potência, constituindo assim uma ligação em ponte muito interessante pois permite o controle do motor em duplo sentido sem a necessidade da utilização de uma fonte simétrica.

Os transistores usados nesta etapa podem ser os BD135/BD136 para motores de menor consumo (até 500 mA) ou o par TIP 31/ TIP 32 para motores mais passantes.
Na configuração Darlington com estes transistores podem ser usados qualquer transistor de uso geral, como os BC 548/BC558.
Formando a lógica de controle da etapa de potência utilizamos um circuito integrado CMOS tipo 4030 (quatro portas EXCLUSIVE OR) sendo que as portas G1 e G2 do chip funcionam como simples inversores para manter a polarização simétrica correta entre os transistores.
As portas G3 e G4 além de isolarem a etapa de potência da entrada do driver fornecendo a corrente necessária para excitação dos transistores constituem a ponte principal da lógica de controle que aciona os motores quando se aplicam as entradas C1 e C2 os sinais de controle conforme a tabela abaixo:
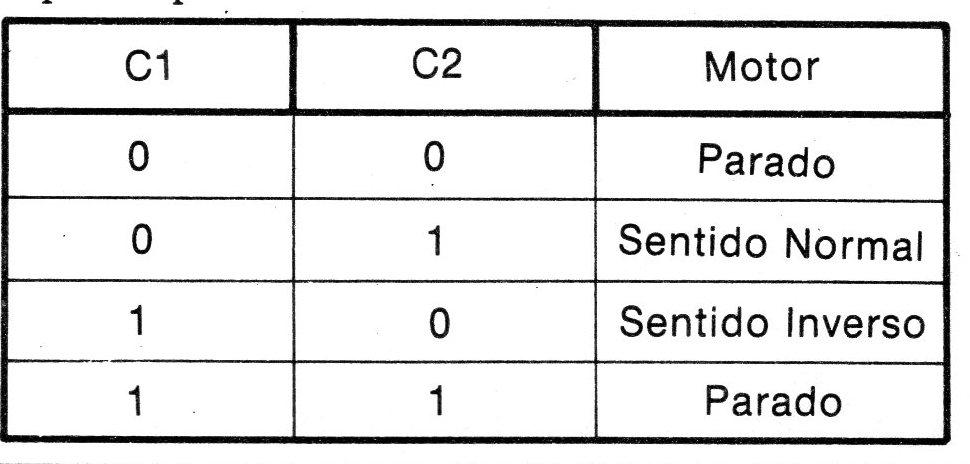
Vale a pena notar que as portas G3 e G4 tem a função importante de evitar que todos os transistores, por um acidente qualquer, venham a conduzir ao mesmo tempo o que poderia causar a queima de toda a ponte.
Os sinais de controle devem ser compatíveis Com os circuitos CMOS, podendo vir de uma interfase de saída para computador ou de filtros de rádio controle.
Na figura 2 temos o desenho da placa de circuito impresso bem como a disposição dos componentes sobre a mesma; por se tratar de um circuito simples por demais, não julgamos necessário tecer mais nenhum comentário sobre sua realização.











