O sistema Polaroid 6500 é um Sonar Ultrassônico que mede a distância ou presença de objetos, enviando ondas de som pulsadas para o objeto e medindo o tempo de retorno do eco. Assim, conhecendo a velocidade do som conseguimos determinar a distância em que o objeto se encontra.
Nota: O artigo é de 1997. Os conceitos básicos são válidos para versões mais modernas do PIC. Outros artigos sobre Basic Stamp e PIC publicados pelo autor são encontrados no site.
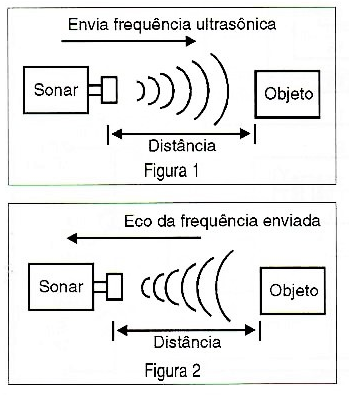
A grande vantagem de utilizar um sistema do tipo sonar é de termos um sensor que consegue medir a distância ou a presença de um objeto sem a necessidade de contato. Na figura 1 é mostrado como são enviadas as ondas de som no sentido do objeto. Na figura 2, como as ondas são refletidas na forma de eco. Conhecendo a velocidade do som e o tempo da chegada do eco, podemos calcular a distância do objeto.
Como a velocidade do som é de 1130 pés por segundo (aprox. 344 metros por segundo) uma polegada (25,4 milímetros) é percorrida pelo som em um período de 73,746 microssegundos. Na figura 1 o tempo para que a onda de som chegue ao objeto a uma distância de 254 milímetros (10 polegadas) é de 737,46 microssegundos, o mesmo tempo para que o eco volte ao sonar.
Vantagens do sensor de ultrassom:
- Mede a distância do objeto, não somente a sua presença.
- O objeto pode estar a poucos centímetros ou até alguns metros (11 metros ou mais)
- À luz ambiental não afeta a medição.
- Alta sensibilidade mesmo com objetos pequenos ou grandes.
Aplicações:
- Controle de movimento
- Controle de nível de líquidos ou sólidos granulados
- Sensores de dimensão ou distância
- Robótica
Sonar Polaroid 6500
O Sonar Polaroid 6500 é um módulo que gerencia um transdutor que emite som na frequência de ultrassom e recebe o eco do som emitido. Faz toda a filtragem e o tratamento de sinal necessário e gera um sinal lógico, no qual o período de duração reflete o tempo em que a transmissão de 16 pulsos a 49,4 KHz demora para chegar ao objeto e ser refletida de volta (eco) ao Sonar.
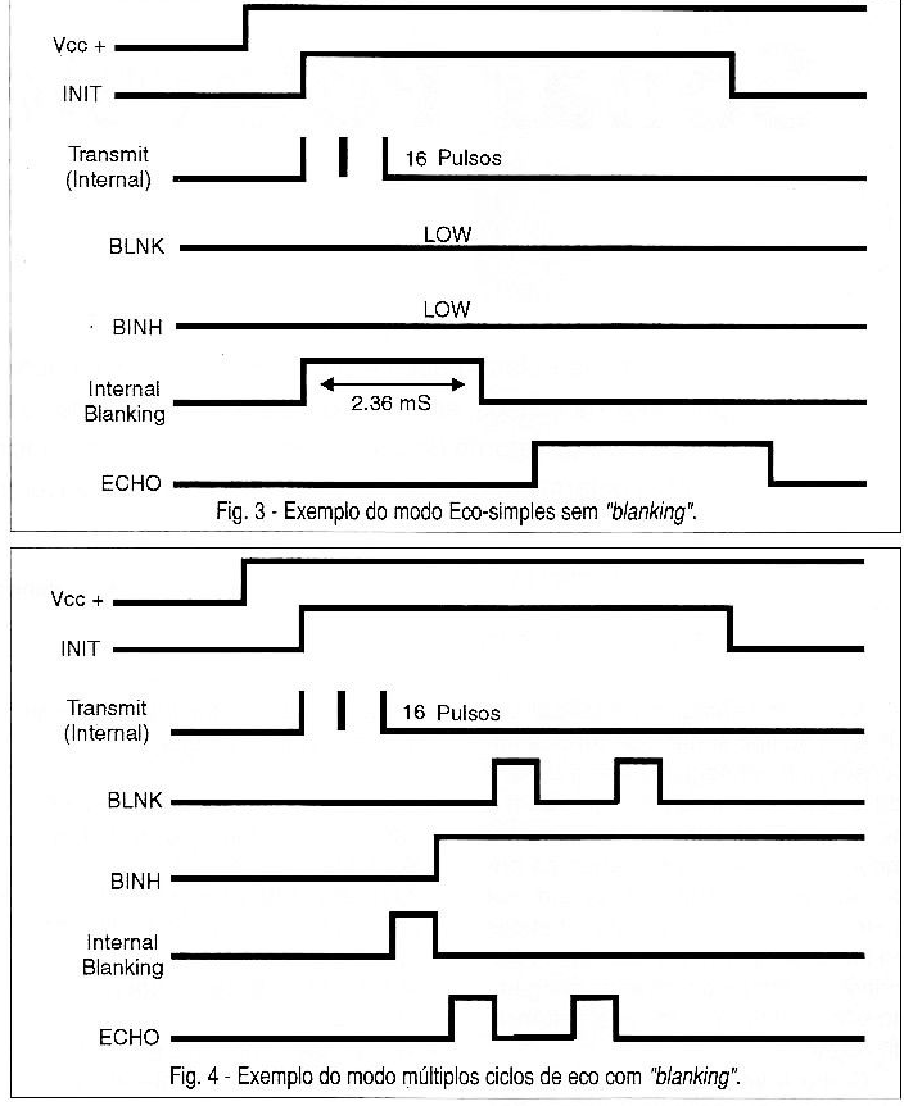
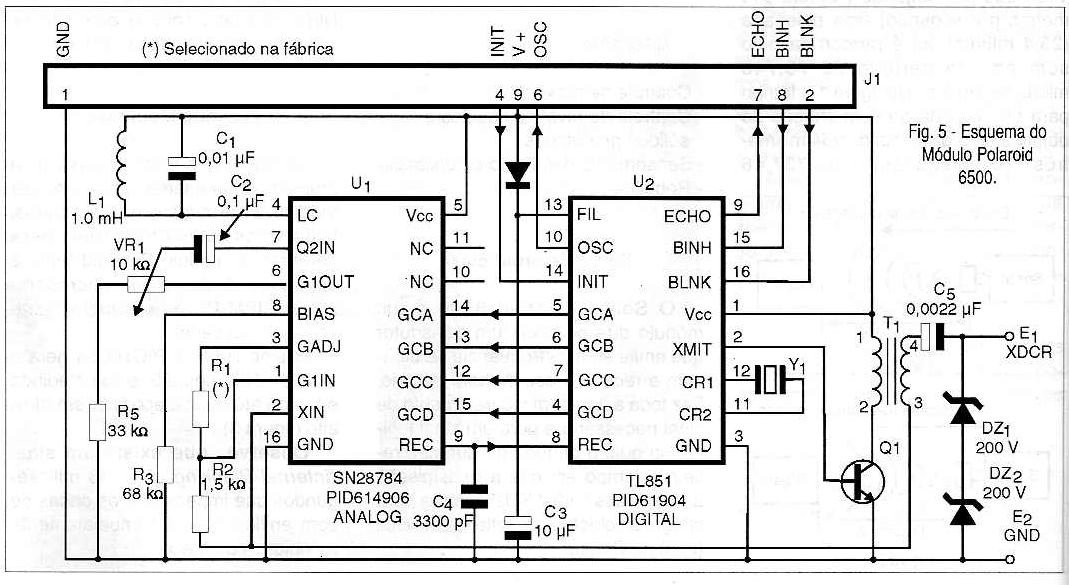
O módulo pode trabalhar em dois modos de funcionamento “Eco Simples” (figura 3) ou “Múltiplos Ecos” (figura 4). No modo “Eco Simples" são feitas medições simples, já no modo “Múltiplos Ecos” é possível selecionar o cancelamento de ecos para medidas de múltiplos objetos.
O esquema elétrico do Módulo Polaroid 6500 pode ser analisado no esquema da figura 5 com destaque para os Cls, um Analógico que faz todo o tratamento do Eco recebido e um Digital que faz o controle do módulo e a interface através do conector J1.
Fazendo Medições
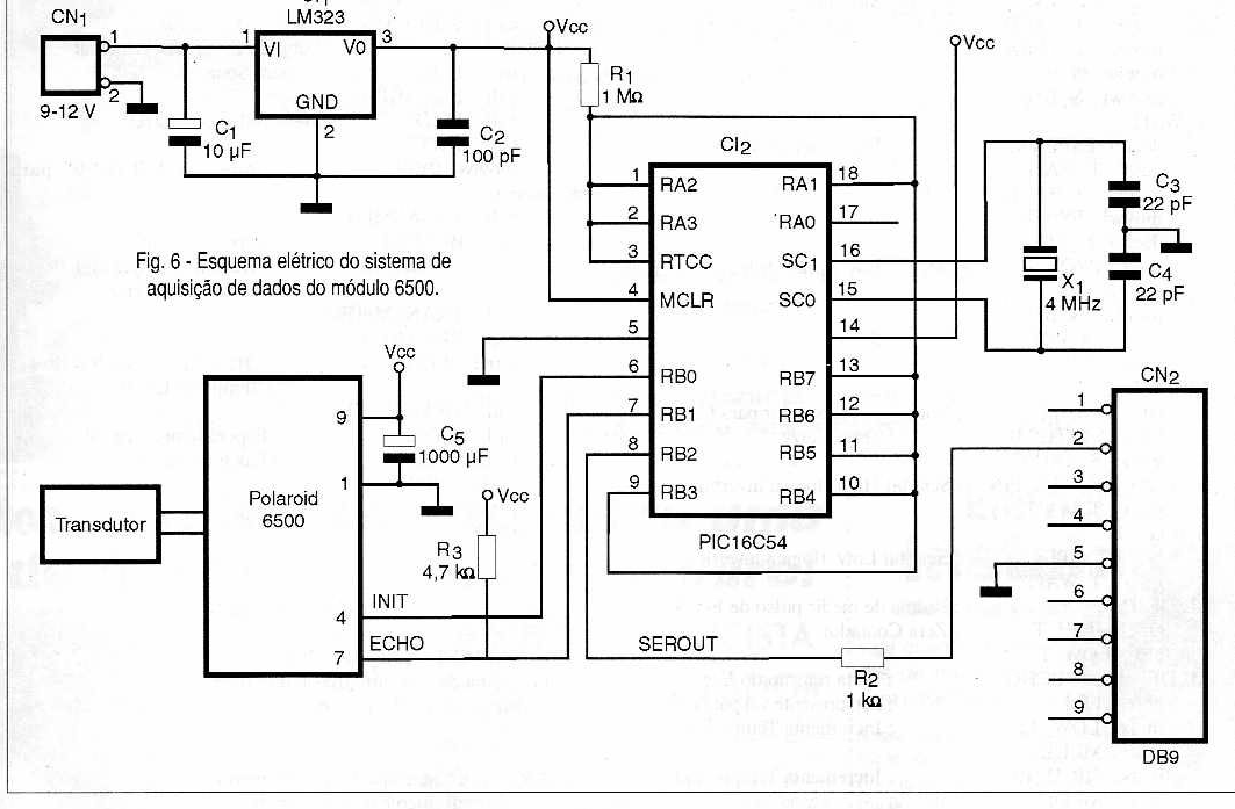
Na figura 6 o leitor observa uma proposta de montagem para executar medições de distâncias de objetos. Utilizamos um PIC16C54 para gerenciar o módulo Polaroid 6500 e enviar os dados a um microcomputador IBM PC ou compatível através da porta serial.
O pino RBO do PIC16C54 gera o sinal de INIT (figura 3) e fica medindo o tempo até o sinal eco ficar em nível alto (figura 3).
Observe que existe um sinal “Internal Blanking” de 2,38 milissegundos que impede que as ondas de som enviadas sejam imediatamente recebidas como eco.
O programa do PIC
O programa é muito simples e pode ser analisado na listagem. Como a estrutura do PIC é de 8 bits, para gerar contagens superiores a 255 temos que gerenciá-las por programação. O leitor poderá observar as técnicas utilizadas e aproveitar em outras aplicações. Basicamente o que o programa faz é mensurar o tempo após INIT alto até ECHO ficar alto, após isso transmite o valor (em hexadecimal) para o PC.
O programa no PC
Foi elaborado em QBASIC e tem como objetivo transformar o tempo obtido pelo PIC em distância. O algoritmo utilizado pode ser analisado através dos comentários. Caso o leitor queira, poderá sofisticar mais o programa e inclusive utilizar outras linguagens de programação.
Adaptando para usar o BASIC Stamp.
Em vez de utilizar o PC, poderemos fazer a aquisição de dados através de um BASIC Stamp, basta configurar o pino do Stamp para receber o dado serialmente.
Uma aplicação interessante é conseguida se pusermos o sistema em um robô, assim o mesmo conseguirá “visualizar” obstáculos.
Conclusão
A proposta do artigo foi apresentar alguns conceitos básicos de Sonar e o funcionamento do Módulo Polaroid 6500.
O hardware proposto tem a finalidade de mostrar uma maneira simples e didática de se mensurar a distância do objeto.