









Este artigo é de 2002. Serve como base para projetos semelhantes com versões mais modernas do LEGO para mecatrônica. O autor, Luiz Henrique Corrêa Duarte, descreve a montagem de um interessante robô com o LEGO disponível na época e que hoje pode ser feita com mais recursos.
Competição! Palavra chave para estimular o aprendizado em Mecatrônica e, nesse quesito, o Kit 9790 Robolab da LEGO Dacta dá um show em termos didáticos e facilidade de uso. O objetivo deste artigo é mostrar como funciona em linhas gerais este kit, construindo um robô capaz de detectar um obstáculo através de suas “antenas” e desviar-se do mesmo. O ponto forte deste material e' a simplicidade em projetar e desenvolver os programas para controle do robô.
Luiz Henrique Corrêa Bernardes
Essa facilidade está fazendo com que o kit seja adotado em diversas escolas do pais (2002).
A atividade mais comum exercitada nas escolas com este kit, proposta pela própria LEGO, é a competição chamada “Enlatado”. Nela se definem vários grupos que têm como meta montar e programar um robô que possa retirar latas de um campo específico, conforme ilustra a figura 1.
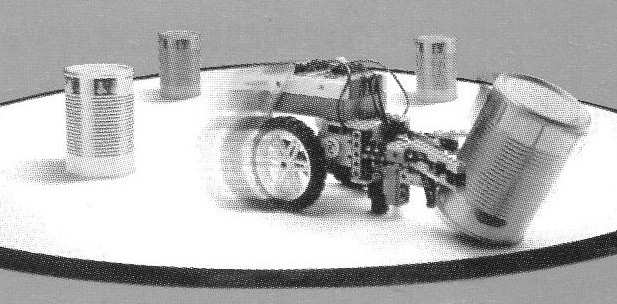
Ganha a competição o grupo cujo robô retire o maior numero de latas em dois minutos.
Um Guia de Atividades chamado “Notas do Professor“, inclui informações detalhadas sobre a competição “Enlatado”, bem como a descrição e especificação para nove competições (desafios) adicionais.
O interessante no material é que nada vem “pronto”, ou seja, tudo está desmontado e os manuais dão apenas sugestões de como fazer alguns tipos de acionamento e de programação. Portanto, a criatividade e a percepção são exigidas ao máximo. Como o ambiente é de disputa, existe, naturalmente, a união do grupo, e o material do professor orienta como montar essa equipe e aproveitar o máximo de cada elemento do grupo, delegando tarefas e responsabilidades.
Como exemplo, temos o especialista em “comunicação”, que é o encarregado por promover a equipe e o evento. Essa pessoa terá que utilizar e desenvolver outros conhecimentos, além daqueles que estão relacionados à Mecatrônica.
Para os alunos pode ser uma experiência muito gratificante, pois eles vão, de certa forma, gerenciar um projeto complexo do começo ao fim, além de lidar com dificuldades técnicas e de relacionamento com pessoas, sem contar que tudo isso tem uma “pitada” de competição, considerando-se que todas as equipes querem vencer. Qualquer semelhança com a vida real dentro de uma empresa é mera coincidência!
A figura 2 mostra alunos do SENAI de Sorocaba em plena competição do “Enlatado” (em 2002), um grande evento feito na escola que movimentou todo o corpo discente e docente além da sociedade próxima da escola (parentes, vizinhos e amigos dos alunos).

O conjunto Desafio em Grupos é composto por aproximadamente 700 peças (figura 3). A seguir, detalharemos as principais:

É A figura 4 exibe o Tijolo RCX, que é o “cérebro” do sistema. Nele, armazenamos os programas que serão executados. Ele tem os drivers de acionamento dos motores, gerencia os sensores e também toca música.

A figura 5 apresenta a torre de transmissão. Ela é ligada ao PC (ou Macintosh) através de um cabo serial.

Os dados são transmitidos e recebidos do Tijolo RCX por meio de luz infravermelha (como nos controle remotos de TV). A figura 6 ilustra em detalhes onde fica o transceiver tanto da Torre como do tijolo RCX.

A figura 7 detalha os conjuntos de engrenagens disponíveis, com as quais conseguimos até montar um eixo com diferencial (figura 8).


Essas engrenagens são facilmente montadas em conjunto com os dois motores disponíveis (figura 9).

Além dos tradicionais blocos do LEGO (figura 10), temos até alguns elementos com requintes para enfeitar as montagens (figura 11).


O software ROBOLAB que foi desenvolvido em conjunto com a National Instruments, é um poderoso ambiente de programação visual de fácil aprendizagem e utilização. Uma vez instalado o ambiente ROBOLAB, podemos assistir a um pequeno filme que ensina como fazer a comunicação com o RCX e a conexão com sensores e motores (figura 12).

A figura 13 anuncia o ambiente de programação do ROBOLAB com um programa que gerencia o robô “bate-volta”, que construiremos a seguir (MEC292).

Podemos notar que a programação é totalmente visual onde temos vários blocos de funções interligados. A figura 14 ilustra a paleta de funções junto com a janela de ajuda explicando a função reverter.

A tabela 1 mostra as funções utilizadas no nosso programa.

Na sequência, vamos mostrar como construir um robô utilizando este programa. (Veja artigo MEC292)










