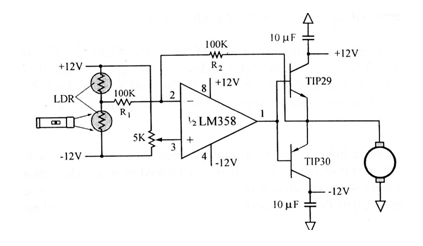
Este circuito foi encontrado numa publicação americana dos anos 90. Operacionais equivalentes mais modernos podem ser usados. Os sensores são LDRs e os transistores de acordo com o motor controlado, devem ser dotados de dissipadores de calor. O circuito serve como um controle de direção (segue a linha) para robôs.