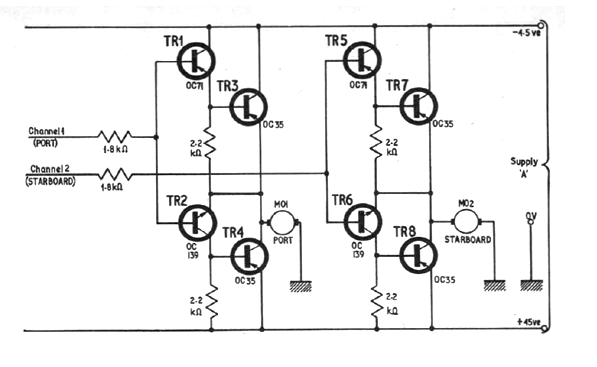
Este controle de motor para robôs é de uma documentação inglesa de 1968. Os transistores originais são de germânio, mas podemos usar equivalentes de silício e a tensão deve ser de acordo com os motores usados.



![]()







Este controle de motor para robôs é de uma documentação inglesa de 1968. Os transistores originais são de germânio, mas podemos usar equivalentes de silício e a tensão deve ser de acordo com os motores usados.










