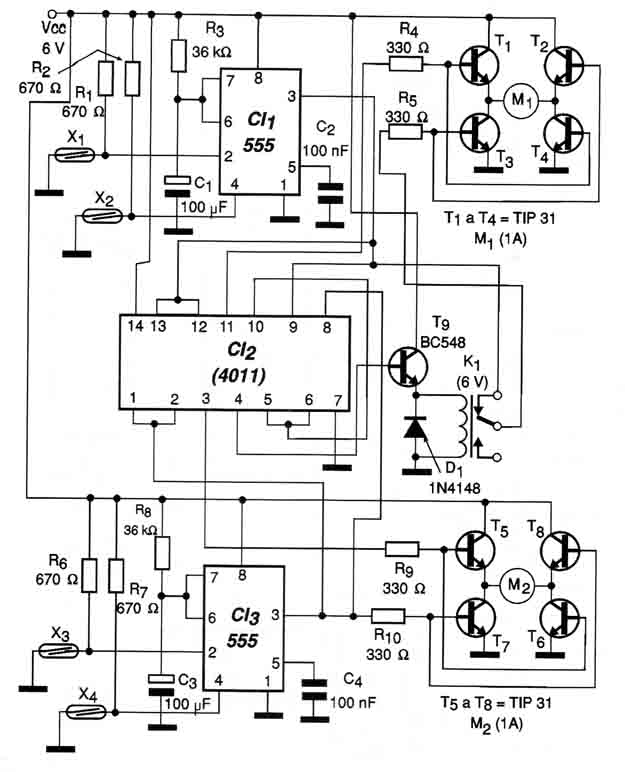
Este circuito de uma documentação de 2002 aciona os dois motores de um robô de modo diferencial baseado em informações obtidas pelos sensores de X1 a X4. Os motores são do tipo com redução e os transistores que os controla devem ser dotados de pequenos dissipadores de calor. A alimentação deve ser de acordo com os motores e o relé.