









Quase tudo hoje em dia é sem fio. As redes de telecomunicações se expandem e com elas aumenta o número de tecnologias utilizadas. O resultado dessa expansão e diversificação é inevitável: uma dificuldade maior em se fazer seu sincronismo para garantir a integridade dos dados, fundamental para se atingir as metas de Qualidade de Serviço (QoS) tão almejadas por todos. (2006)
A necessidade de se sincronizar as redes na transmissão de diversos tipos de dados é fundamental em vista da sua diversidade. De fato as redes telefônicas podem usar diversas tecnologias como, Plesiochronous Digital Hierarchy (PHD), Synchronous Optical Netowrk (SONET), Synchronous Digital Hierarchy (SDH) e Asynchronous Transfer Mode (ATM).
Um ponto fundamental para os implementadores é saber como sincronizar os diversos tipos de redes de modo a atender as exigências internacionais para a manutenção da qualidade do sinal.
Para que o leitor entenda como isso pode ser feito, partimos da estrutura básica de uma rede.
Normalmente elas são estruturadas na forma mostrada na figura 1 em que existem diversos nodos.
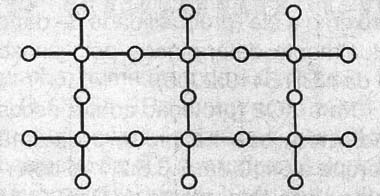
Cada nodo pode ser um ou mais sistemas conectados em conjunto. Por exemplo, uma estação radio base (ERB) ou uma estação de comutação telefônica ou centro de transmissão de dados consistem em nodos.
A operação de cada nodo é controlada por um clock que consiste no seu coração.
Esse clock pode estar dentro do próprio sistema de telecomunicações como no caso do sistema Digital Cross Connect (DCC) ou Stand ALine Synchronization Equipment (SASE).
O clock do nodo também é chamado Building Integrated Timing Supply (BITS) ou Sinchronization Supply Unit (SSU).
A Finalidade da Sincronização
Se considerarmos que cada nodo de um sistema de telecomunicações possui seu próprio clock, durante o processo de transmissão pode perfeitamente ocorrer pequenas diferenças de velocidade de funcionamento, afetando assim o sincronismo na transmissão.
Essa diferença de freqüências faz com que os buffers de entrada do sistema de telecomunicações sejam constantemente levados a estados de overflow e underflow (transbordamento ou falta), causando erros de transmissão de dados.
Esses pequenos erros são denominados “slips”, na terminologia técnica de telecomunicações.
Esses slips, conforme veremos mais adiante se traduzem em “cliques” audíveis num sistema de voz sem compressão, mas em outros sistemas eles podem ter sérias conseqüências, conforme mostra a tabela abaixo.
| Tipo de Serviço | Efeito dos Slips |
| Voz (sem compressão) | 5% dos slips serão ouvidos na forma de cliques na transmissão |
| Voz (comprimida) | Um slip produz um clique audível |
| Facsimile (fax) | Um slip pode fazer com que sejam saltadas várias linhas |
| Modem | Um slip causa uma interrupção de funcionamento de vários segundos |
| Vídeo Comprimido | Um slip faz com que sejam perdidas várias linhas da imagem. Vários slips podem congelar os frames por vários segundos. |
| Protocolo da dados encriptados | A capacidade de transmissão ficará reduzida por um slip. |
Por esse motivo, é preciso cuidar da sincronização de modo a minimizar os “slips” havendo para isso diversas técnicas a serem empregadas.
Existem meios de se calcular com precisão o número de slips que ocorrem em função da variação da freqüência do clock, ou da diferença de sincronização.
A tabela dada a seguir, obtida a partir desses cálculos nos mostra o número de slips esperados em função da diferença de freqüências entre os sistemas.
$
Diferença de frequência entre os sistemasTaxa de slips para sinais de 8k frames por segundo0010-111 slip a cada 4,8 meses10-101 slip a cada 14,5 dias10-91 slip a cada 1,45 dias10-86,9 slips por dia10-72,9 slips por hora10-628,8 slips por hora10-54,8 slips por minuto
Lembramos também que não apenas as diferenças de freqüência causam slips, mas também as tolerâncias de entrada dos sistemas de comunicações.
Variações de tempo de propagação dos sinais podem incluir neste caso como, por exemplo, a contração e dilatação de cabos do sistema, devido às variações de temperatura.
Os próprios clocks dos nodos podem gerar variações imprevisíveis como, por exemplo, as variações de freqüência devido ao envelhecimento dos cristais.
O que fazer?
A ITU (International Telecommunications Union) possui diversas normas em que recomendações são feitas no sentido de se melhorar a sincronização das redes e com isso atender as exigências de melhor qualidade de serviço.
Basicamente, essas normas podem ser atendidas com alguns cuidados que vamos analisar a seguir.
Centralizar a sincronização através de um clock mestre, conforme mostra a figura 2.
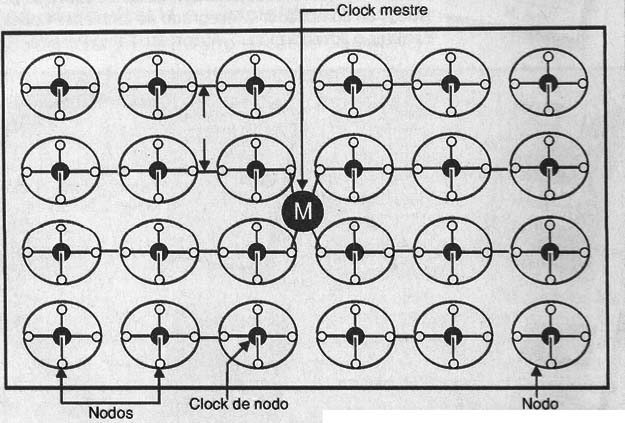
O clock mestre ficará localizado no centro da rede de modo que todos os sinais cheguem ao mesmo tempo nos dispositivos sincronizados.
Como os dispositivos são sincronizados pelo mesmo clock não existem problemas na troca de sinais entre eles. Deve-se apenas cuidar para que os links não estejam sujeitos a problemas que possam afetar a sincronização.
Nesse caso incluímos os cabos longos que podem sofrer variações de características com a temperatura. Da mesma forma conexões SONET e SDH não devem ser usadas como links de sincronização.
Se a diferença de tempos de sincronização em algum elemento da rede for maior que 18 us, esse elemento deve ser sincronizado de outra forma, ou fazer parte de uma outra partição (controlada por outro clock).
Uma outra forma de se fazer a sincronização é através de clocks mestres distribuídos, conforme mostra a figura 3.
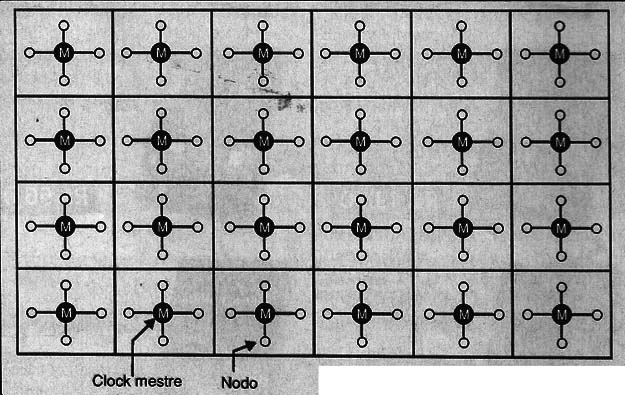
Nesse caso, o que se faz é dotar a rede de um certo número de pseudo clocks mestres, conforme mostrou a figura anterior. Existem portanto ilhas de sincronização n a rede.
A grande vantagem em se adotar esse sistema é que além de mais fácil de implantar, como os dispositivos sincronizados podem ficar mais perto dos clocks existem menos problemas de slips.
O melhor desempenho de um sistema que tenha esse tipo de sincronização é obtido com o uso de clocks de césio. No entanto, esses dispositivos são muito caros, sendo necessários em número elevado, conforme sugere a própria estrutura do sistema.
Um método econômico de se gerar um sinal mestre de clock é através de um receptor GPS (Global Positioning System).
Os receptores GPS sã pequenos e relativamente baratos, mas para gerar a performance PRC necessária, eles devem ser conectados a um SASE.
Para se obter uma operação segura podem ser usados dois receptores GPS em conjunto em cada nodo.
O uso do GPS tem, entretanto, uma desvantagem, pois trata-se de dispositivo sensível sujeito tanto à interferência como à problemas de dano com descargas elétricas.
Uma outra forma de se obter uma sincronização com pouco gasto é a mostrada na figura 4.
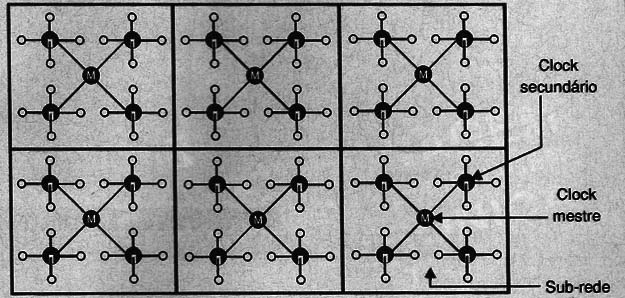
Nesse caso, existem clocks separados, controlados por dispositivos centralizados de sincronização ou clocks mestres de sincronização. Cada clock mestre controla um certo número de clocks secundários ou regionais
Também é possível obter sinais de clock a partir de redes cooperadoras, conforme mostra a figura 5.
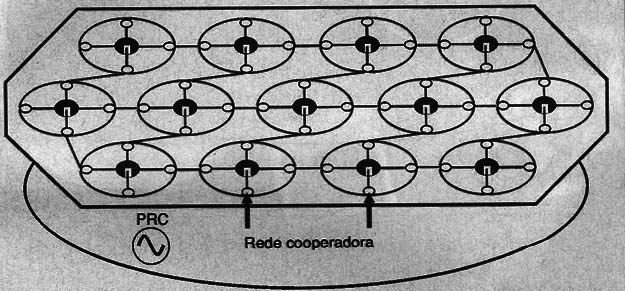
Se uma rede próxima possui sinais de clock disponíveis, eles podem ser “emprestados” para fazer a sincronização dos dispositivos de uma outra rede.
Nesse caso, é preciso que as redes sejam capazes de operar na mesma freqüência. A vantagem está no fato de que, as duas redes sendo sincronizadas pelo mesmo clock, não apresentam problemas de slips.
A desvantagem do sistema está no fato de que um distúrbio no clock mestre afeta as duas redes.
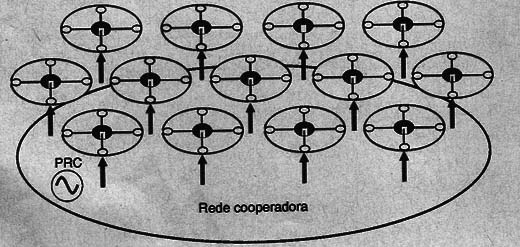
Conforme mostra a figura 6, os sinais de clocks podem ser retirados de diversos pontos da rede cooperadora.
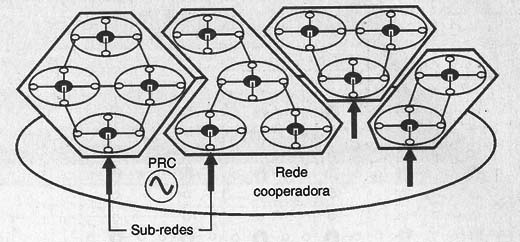
É preciso levar em conta que a rede cooperadora pode cobrar pelo uso do sinal de clock. Esse custo deve ser analisado, pois pode ser maior do que o envolvido na implantação de um clock próprio.
Assim, esse sistema é interessante quando se pretende sincronizar um pequeno número de sub-redes a partir de um sinal de uma rede cooperadora. A figura 7 mostra esse caso.
A Escolha do Método
Na tabela dada a seguir temos as principais características dos métodos de sincronização que podem ser utilizado. Analisando o seu caso, o leitor pode fazer a escolha certa obtendo o melhor desempenho ao menor custo.
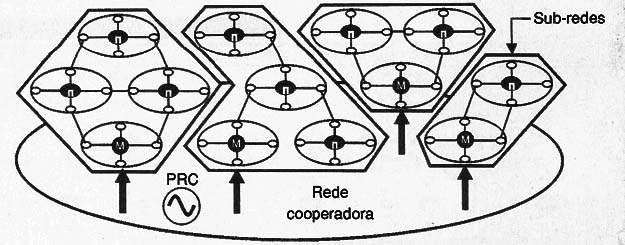
É claro que existe a solução híbrida, em que diversos métodos são usados ao mesmo tempo, cada qual para um setor, conforme suas características, conforme mostra a figura 8.
| Método de sincronização | Planejamento | Probabilidade de falhas | Links de sincronização necessários | Tamanho máximo da rede para melhor custo |
| Clock mestre centralizado | Relativamente difícil | Grande para redes que cubram grandes áreas | SONET ou SDH | >40 nodos |
| Clocks mestres totalmente distribuídos | Muito fácil | Muito baixa | Nenhum | |
| Clocks mestres parcialmente distribuídos | Fácil | Baixa para subredes pequenas | SONET ou SDH | |
| Sinais de Clock totalmente distribuídos de rede cooperadora | Muito fácil | Depende da rede cooperadora | Nenhum | Depende do custo dos sinais usados |
| Sinais de clock parcialmente distribuídos de uma rede cooperadora | Fácil | Depende da rede cooperadora | SONET ou SDH | Depende do custo dos sinais usados |
Conclusão
Cada método de sincronização tem suas vantagens e desvantagens, o que significa que não se pode indicar uma solução genérica para o problema da sincronização.
Algumas recomendações podem ser dadas em função de alguns casos especiais:
Se a rede possui seu próprio link PDH, SONET ou SDH então qualquer método pode ser usado, dependendo apenas da relação custo/benefício.
Se são usados tributários SONET ou SDH para sincronização os sinais de clocks podem ser distribuídos por uma rede cooperadora.
Se um clock mestre centralizado é usado para sincronização, é preciso analisar os níveis de falhas para se verificar qual a melhor estratégia a ser usada.
Boa parte da informação contida neste artigo está em documentação da Oscilloquartz, empresa Suíça especializada em fabricar osciladores de precisão para sistemas de telecomunicações.










