









Um problema que os projetistas de robôs, veículos mecatrônicos e automatismos que usam motores e caixas de redução encontram é medir suas características, principalmente a força que podem dispor. Veja neste artigo como descobrir estas características.
Diferentemente dos motores de corrente alternada, onde a velocidade é determinada pela frequência da tensão de alimentação, e eventualmente a forma máxima que mais ou menos constantes, os motores de corrente contínua se comportam de maneira diferente.
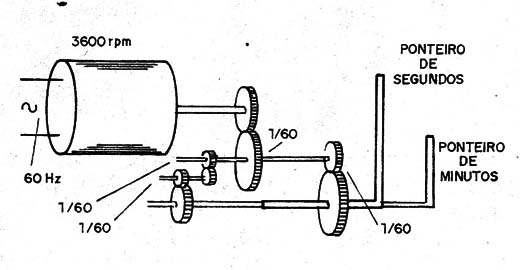
Num motor de corrente alternada a sincronização do rotor é feita pela frequência da rede de modo que podemos ter 1 800 rotações por minuto (meia volta por ciclo) ou 3 600 rotações por minuto (1 volta por ciclo).
É claro que existem outros tipos, dependendo do arranjo de suas bobinas.
Motores como estes, dada sua constância d velocidade, podem ser usados para movimentar o mecanismo de um relógio ou timer, bastando uma redução para acionar os ponteiros, conforme mostra a figura1.
Nos motores de corrente contínua, o princípio de funcionamento é outro.
Conforme mostra a figura 2, a alimentação da bobina é feita através de escovas, o que significa que a velocidade de comutação depende apenas da própria velocidade do motor.

Isso significa que não existe nenhum elemento para sincronizar o motor que terá a possibilidade de girar tanto mais rápido quanto maior cor a corrente circulante e mais liberdade encontrar o rotor para girar.
Evidentemente, existem limites para a velocidade que são dados pelo fato de que a impedância da bobina cresce com a velocidade, dificultando assim qualquer aumento adicional da corrente além de certo limite.
Da mesma forma, se a corrente for muito intensa ocorre o aquecimento excessivo da bobina com a possibilidade de queima.
Na figura 3 temos as curvas que mostram como a força e a velocidade variam com a corrente.

Obrigando um peque no motor de corrente contínua a fazer força, vemos que a sua velocidade diminui e ao mesmo tempo, a intensidade da corrente aumenta, ou seja, temos o desenvolvimento de maior potência que deve ser entregue pelo gerador externo.
O leitor pode facilmente verificar isso na prática com o arranjo mostrado na figura 4.

Com o motor girando livremente, a corrente drenada é menor, o que é indicado pelo multímetro numa escala apropriada de correntes ou pela lâmpada brilhando menos.
Segurando o eixo do motor de modo que ele seja obrigado a fazer mais força, vemos que a corrente aumenta, tanto pela indicação do multímetro como pelo aumento do brilho da lâmpada.
Por este motivo é comum que os fabricantes dos motores não indiquem exatamente a tensão de operação do motor e nem a velocidade exata de rotações.
Os fabricantes indicam então uma faixa de tensões de operação e uma faixa de rotações.
O único cuidado a ser tomado ao se utilizar estes motores é que, para tensões mais altas, fazendo muita força com a redução da rotação, esses motores não se aqueçam podendo queimar.
A faixa de rotações também não podem ser estreita e normalmente os fabricantes dão valores que podem ir de 1 000 a 5 000 rpm.
Momento
A “força” que um pequeno motor pode fazer numa aplicação não depende exclusivamente da potência, ou seja, da tensão aplicada multiplicada pela corrente drenada.
O fator mais importante no modo de aplicação da força de um pequeno motor a um sistema mecânico é a maneira como isso é feito.
Normalmente, estes pequenos motores são dotados de eixos que são acoplados aos dispositivos que devem ser movimentados.
Verificamos então, através de uma experiência simples, que o diâmetro deste eixo influi bastante na força que motor pode disponilizar.
Conforme mostra a figura 5, verificamos que, tendo dois motores exatamente com as mesmas características elétrico, o motor que tem o eixo mais fino “fa mais força”.
Explicação para este fato pode ser dada pelo que denominamos em física ”momento”.

Podemos comparar o eixo do motor a uma alavanca do tipo mostrado na figura 6.

Um eixo fino equivale a uma alavanca curta e um eixo grosso, equivale a uma alavanca mais comprida.
Assim, o eixo curto pode fazer mais força e o eixo longo faz menos força.
O torque do motor expressa justamente estas condições, sendo uma medida que independe da grossura do eixo do motor.
Por exemplo, se um motor tiver um torque de 200 g.cm (gramas x centímetro), isso significa que, se o raio do motor for de 1 cm a força que ele faz é de 200 g.
Se o raio for de 2 cm a força será d 100 g.
A figura 7 mostra o que ocorre.

Observamos que o torque também é expresso em Newton x Metros (N/m) que é a unidade de força multiplicada por distância no SI, Sistema Internacional de Unidades.
Por esses motivos, a melhor maneira de se especificar quanto de força um motor pode fazer é indicando seu torque.
É claro que este torque deve ser especificado para uma determinada tensão e corrente que também nos levam à rotação em que isso ocorre.
Para pequenos motores, sem indicação alguma, podemos determinar o torque através de medições.
Para isso,colocamos um peso correspondente à força que o motor pode fazer num arranjo em que o motor deva elevá-lo medindo então sua rotação, conforme mostra a figura 8.

Caixas de Redução
Se acoplarmos dois motores diretamente à duas rodas propulsoras de diâmetros diferentes,conforme mostra a figura 9, veremos que os movimentos realizados são diferentes.

Para o caso da roda propulsora de menor diâmetro teremos um deslocamento menor, mas uma força maior num determinado intervalo de tempo, enquanto que no mesmo intervalo, teremos um deslocamento maior, mas menos força para a roda de maior diâmetro.
O trabalho realizado pelo motor, nos dois casos, entretanto, é o mesmo.
Assim, se precisarmos de maior força, devemos sacrificar a capacidade d deslocamento, ou seja, a velocidade.
Nos casos em que precisamos de muita força, e onde o deslocamento necessário pode ser feito em baixa velocidade, uma solução importante consiste no uso de sistemas de engrenagens redutoras ou caixas de redução.
Na figura 10 temos um exemplo de caixa de redução comercial.

Analisemos o funcionamento de uma dessas caixas de redução.
Na figura 11 mostramos que existem duas possibilidades de arranjos de engrenagens e polias.

No primeiro caso usamos duas polias e uma correia.
Como o diâmetro da polia maior é 10 vezes o da polia menor, temos uma redução da velocidade de 10 vezes e um aumento do torque na mesma proporção.
No segundo caso temos duas engrenagens.
Como a primeira é 10 vezes menor que a segunda temos o mesmo comportamento do caso da polia.
Na figura 12 mostramos como é possível chegar a reduções muito grandes utilizando diversas engrenagens.

Na figura 13 temos um procedimento simples para medir a força de um caixa de redução.

Colocando pesos diferentes para que a caixa levante medimos a corrente no motor, mantendo-a dentro da faixa especificada pelo fabricante.
Podemos também determinar a velocidade com que o motor gira e outros fatores importantes para um projeto.










