









Os motores de passo são elementos fundamentais para o controle de diversos tipos de equipamentos de uso industrial, eletrônica de consumo, informática, mecatrônica e muito mais. Para controlar os motores de passo existem diversas possibilidades que dependem da aplicação do tipo de controle desejado e da potência do motor. Neste artigo fornecemos algumas sugestões de circuitos de controle que podem ser bastante interessantes, se o leitor estiver fazendo algum projeto na área.
Nota: Artigo publicado na revista Eletrônica Total 148 de 2011
Os motores de passo mais comuns na maioria das aplicações são os motores de quatro fases, que têm o símbolo mostrado na figura 1.
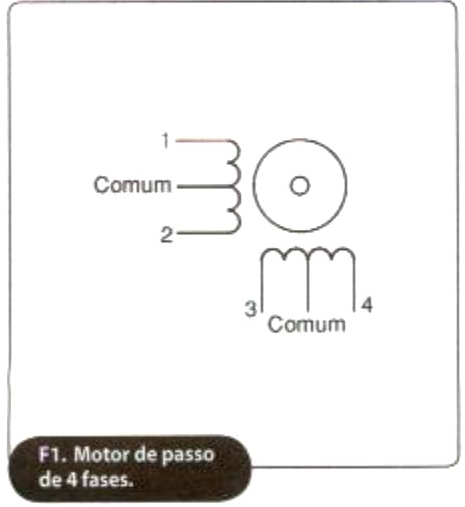
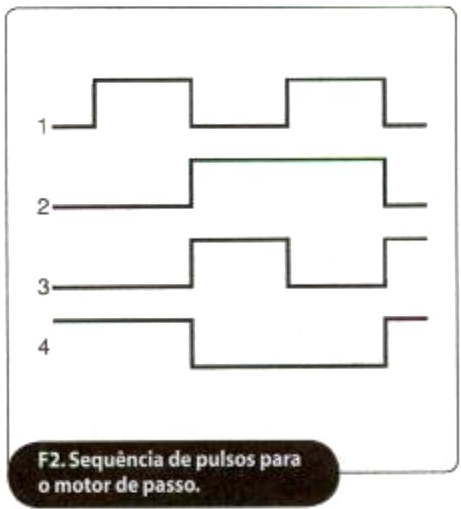
Este motor tem dois enrolamentos duplos que devem ser energizados a partir de uma sequência específica de pulsos para que ele rode, ou então, deve ter os enrolamentos energizados de forma que ele tenha seu rotor levado a uma posição desejada. Na figura 2 temos a sequência típica de pulsos que deve ser aplicada neste tipo de motor para que ele rode.
A maioria dos motores usados nas aplicações comuns de pequena potência tem uma corrente máxima de acionamento por enrolamento de 500 mA, o que leva à possibilidade de empregar nos projetos básicos circuitos integrados dedicados que já possuem "buffers" e lógica interna capaz de suportar diretamente esta corrente.
Estes circuitos integrados como o ULN2803 e UNL2003 podem, sozinhos, controlarem os 4 enrolamentos de um motor de passo até 500 mA sem a necessidade de radiadores de calor. É então com base nestes dois circuitos integrados, que damos quatro circuitos de aplicação de grande utilidade para os leitores que trabalham ou projetam circuitos com motores de passo.
Circuito 1: Comando de 4 entradas
O primeiro circuito, ilustrado na figura 3, consiste na aplicação direta do ULN2003 em que temos 4 entra das diretas para os buffers do circuito integrado.
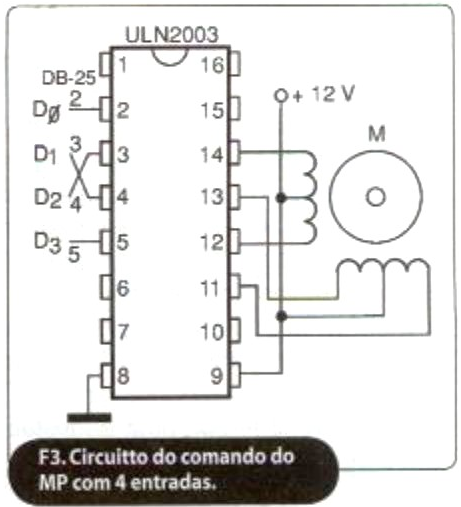
Nesta aplicação as entradas podem ser obtidas de lógica digital TTL ou CMOS, ou diretamente da porta paralela de um PC.
Cada enrolamento do motor de passo é energizado quando a entrada corresponde é levada ao nível alto. Assim, no software que será utilizado deve-se prever tanto o tempo de acionamento de cada saída quanto sua sequência, ou ainda posição para a aplicação desejada.
Observe que há uma alimentação independente de 12 V para o motor de passo, que operará com uma corrente máxima de 500 mA. No diagrama temos as cores dos fios com a identificação para um motor de passo convencional.
Circuito 2: Comando de Duas Entradas
Este circuito consiste em uma variação do anterior, com a diferença de que temos apenas duas entradas usadas. (figura 4).
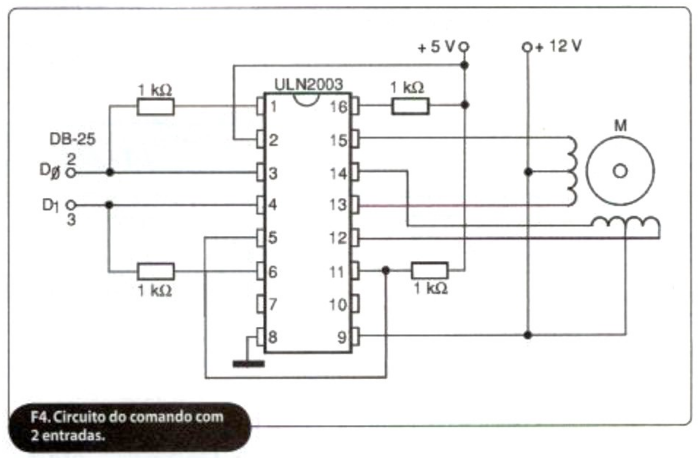
Assim, as bobinas são energizadas com a seguinte sequência de comandos de entrada que podem vir direta- mente da porta paralela de um PC ou de lógica digital TTL (ou CMOS).
Bobina 1 – 00
Bobina 2 – 01
Bobina 3 – 10
Bobina 4 – 11
Neste caso, a corrente máxima que o circuito integrado ULN2003 pode fornecer é de 500 mA por enrolamento. Veja que aqui temos uma fonte de alimentação dupla que deve ter 5 V para a lógica interna e 12 V para a alimentação do motor.
É importante observar que o terra do Cl no pino 8 deve ser comum ao PC ou circuito de acionamento digital, e também aos circuitos de 12 V e 5 V.
Circuito 3: Comando por sensores ou manual
Nesta aplicação utilizamos um circuito adicional de entrada para possibilitar o comando lógico com chaves, sensores ou outros recursos (figura 5).
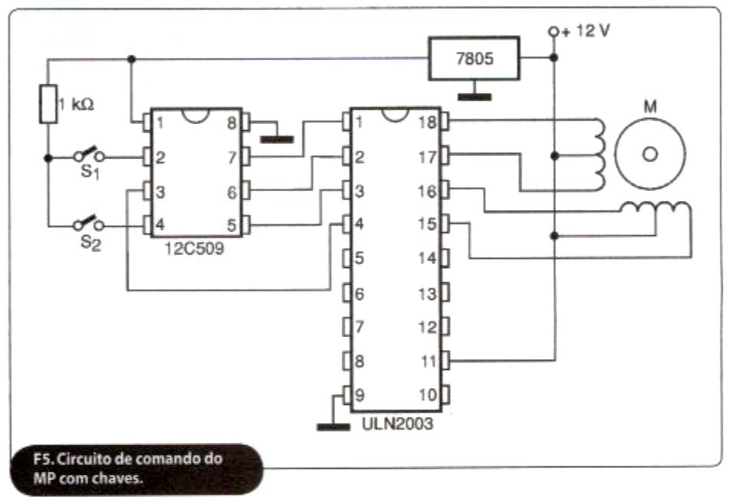
O acionamento de cada bobina do motor vai depender da combinação de níveis fornecida pelos sensores de entrada, conforme tabela semelhante à do circuito anterior. O circuito integrado usado é o ULN2803, que também pode controlar motores de até 500 mA por enrolamento.
Note que temos um circuito regulador de tensão de 5 V que reduz os 12 V da fonte do motor para os 5 V necessários à alimentação do circuito lógico 12C509. As entradas não usadas deste circuito devem ser aterradas através de um resistor de 10k ohms para que as instabilidades de funcionamento sejam evitadas. O circuito integrado 7805 não precisará de radiador de calor, dada a baixa corrente que deve fornecer.
O 12C509 é um PIC que deve ser programado para esta função. Mais informações de como usar este componente nesta aplicação poderão ser obtidas em: www.beowulf.demon. co.uk/stepper.html e em www.phanderson.com/PIC12C509/overview.html
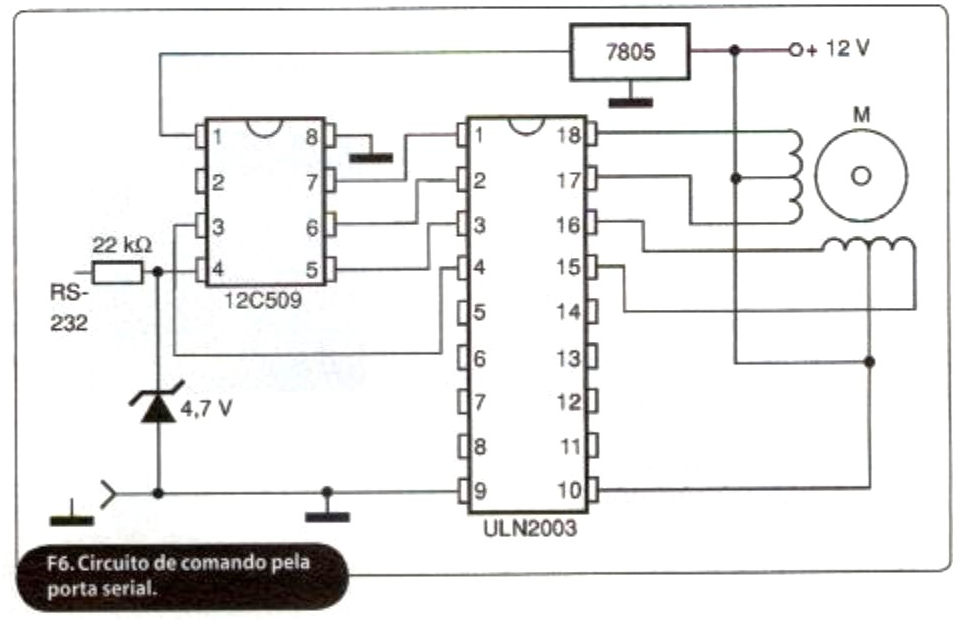
Circuito 4: Comando pela porta serial
O circuito exibido na figura 6 possibilita o controle de um motor de passo pela porta serial de um PC (RS-232). Nesta aplicação temos a utilização do circuito integrado ULN2803 para o controle de potência com a capacidade de fornecer correntes de até 500 mA ao motor controlado.
O circuito integrado 7805 reduz a tensão de 12 V da alimentação do motor para os 4 V necessários à lógica formada pelo circuito integrado 12C509.
O diodo zener de 4V7 x 400 mW serve como filtro para desviar eventuais pulsos de maior tensão que estejam na linha de dados e possam causar problemas de funcionamento ao circuito.










