Este projeto tem como função escanear uma distância máxima de 70 cm referente a alterações no ambiente caso existam alterações de distância, ou seja, movimentações, onde o robô deverá apontar a direção e aproximar-se do objeto, e em seguida fazer uma nova varredura no ambiente de busca de novas alterações.
Frederico Pazeto - Jean Carlos Araújo - Moises Augusto Marangoni Rellen - Cássio F. Benedito Ricardo David
Nota: Publicado na revista Eletrônica Total 146 de 2010.
Base para funcionamento
Este projeto irá usar a base de desenvolvimento do Arduino. (www.arduino.cc)
O Arduino é um projeto open source de protótipos de eletrônica baseados numa plataforma de hardware e software flexível e fácil de utilizar. O microcontrolador é programável usando a linguagem Arduino Processing (base- ada em C/C++).
Esse robô inicialmente terá apenas um sensor de distância, que é o Sharp GP2D12, onde o mesmo possui uma saída analógica proporcional à sua distância de medida. Esse sensor será anexado a um servomotor que irá varrer o ambiente em um ângulo de 180 graus.
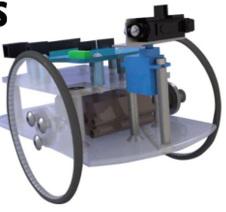
Esse sistema será instalado em uma base acrílica onde ela terá dois motores DC controlados por PWM através do Arduino, que permitirá a movimentação do robô.
Esquema elétrico
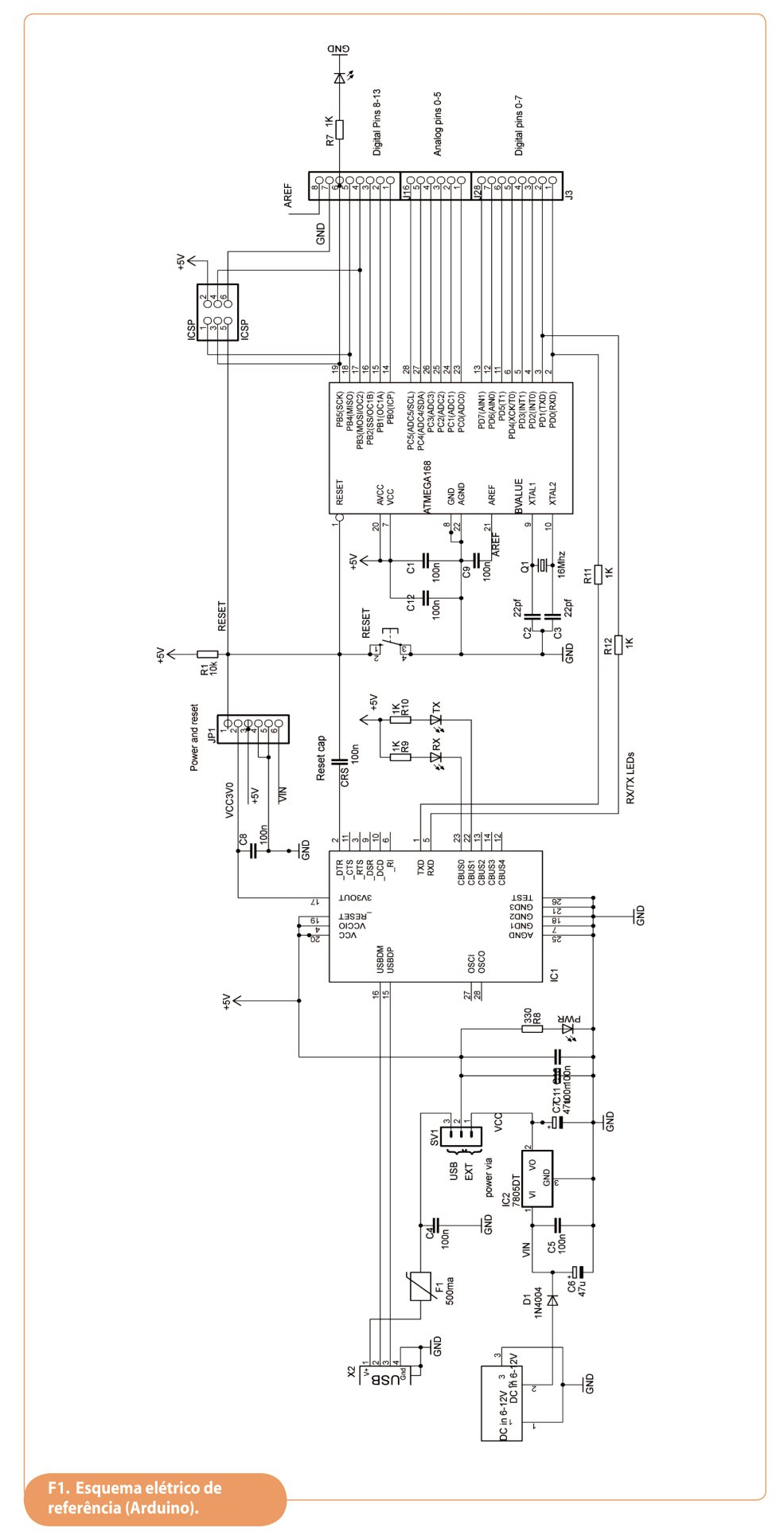
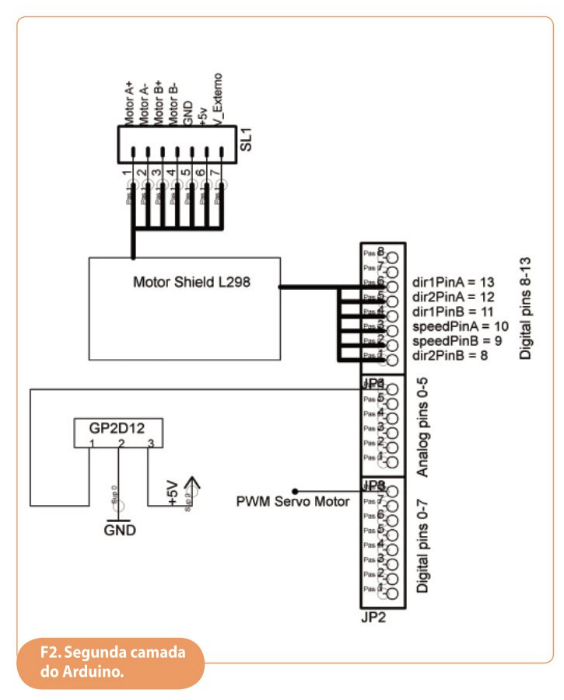
A seguir podemos visualizar o esquema elétrico do Arduino na figura 1 e na figura 2 temos a segunda camada que abrange o L298N, ligação dos motores DC, servomotor e o sensor de distância.
Estrutura da base
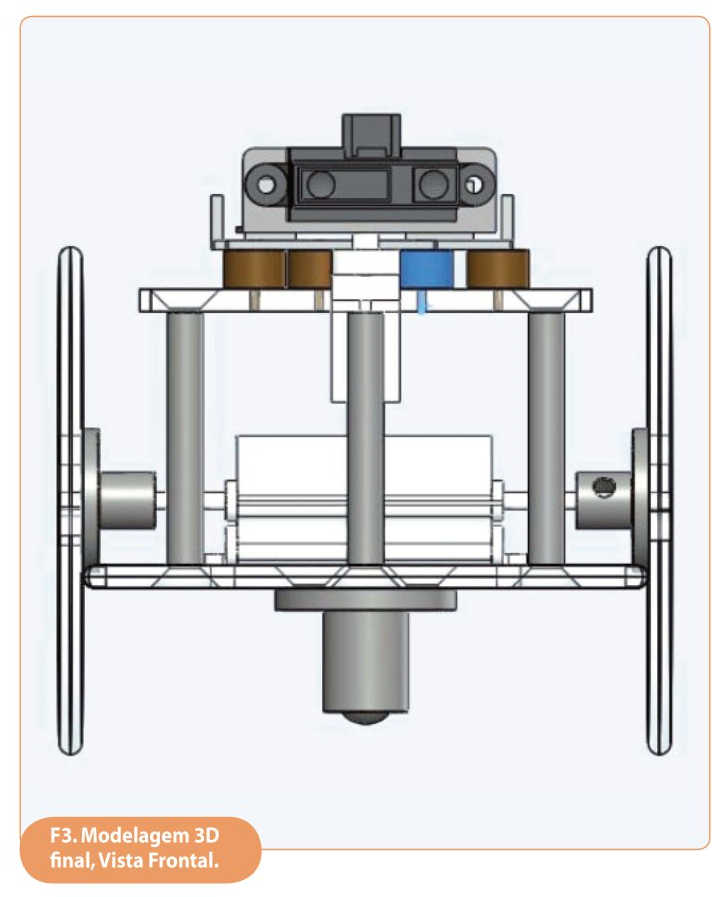
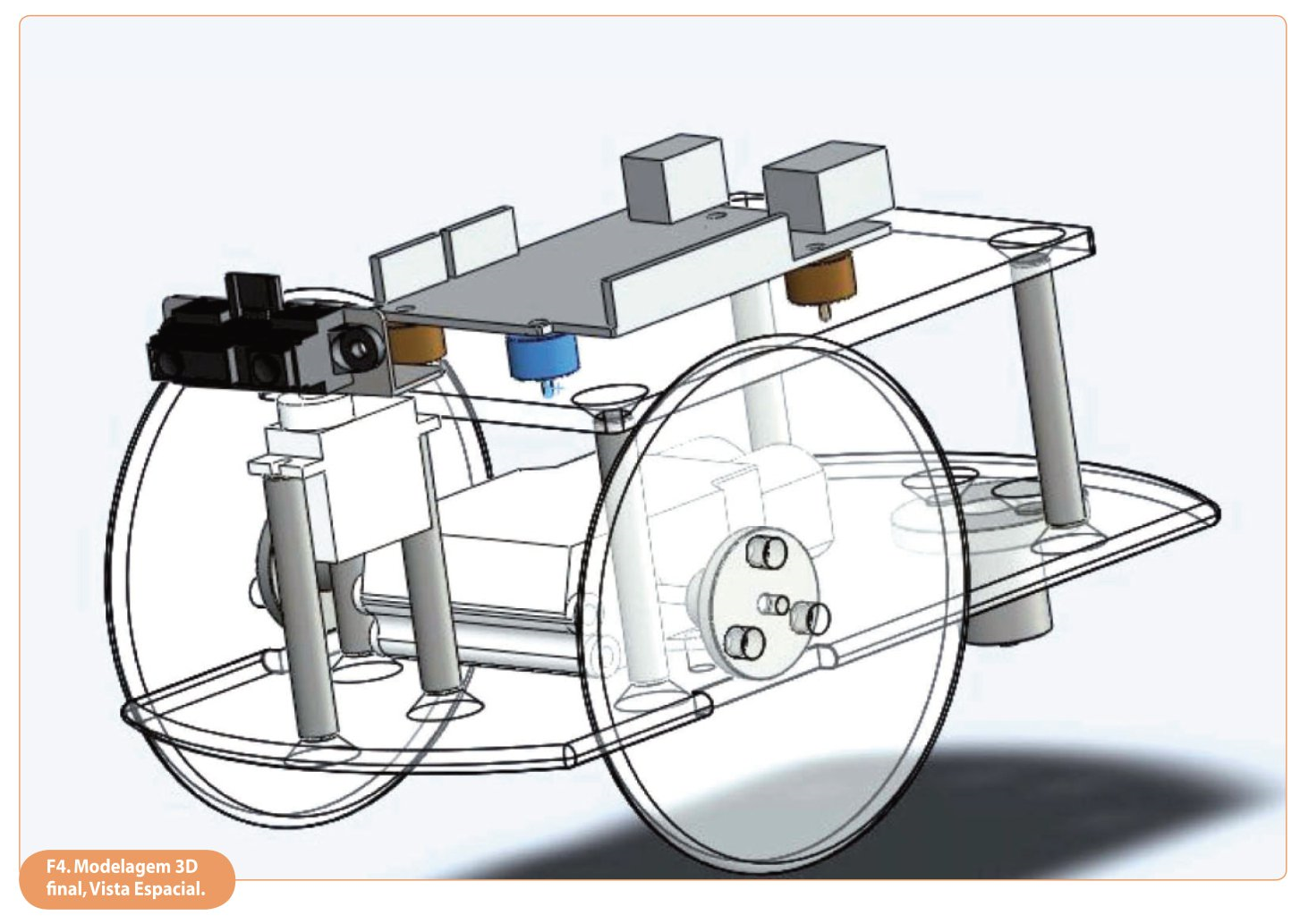
Para se projetar a estrutura da base do robô, foi utilizado o software apropriado para este tipo de desenvolvimento de peças, chamado Solid Works. Figuras 3 e 4.
Carregador de bateria
A melhor opção para se adotar um meio de alimentação do robô, por maior praticidade e maior durabilidade, foi pelo uso das baterias de polímero de lítio de 8,4 V com capacidade de 900 mAh.
Diante desse cenário, surgiu a necessidade de fazer um carregador para essa bateria. As baterias de Lithium Polymero só podem ser carregadas em carregadores específicos para tal, por causa de suas características especiais que diferem completamente das demais baterias, lembrando que usar um carregador que não esteja preparado para esse tipo de bateria pode danificar a bateria além de causar acidentes.
Para melhores resultados, foi usado um carregador "Corrente Contínua/Voltagem Contínua" (CC/CV). Esse carregador inicialmente carrega em 8.4 V com amperagem de 1A, e depois diminui a amperagem até perto da carga máxima, sendo que as baterias estão quase 90% carregadas em uma hora. A tensão máxima permitida por célula da bateria é de 8,40 V, quando as células chegam a 4,2 V elas estão completamente carregadas, a amperagem máxima permitida para baterias de Lithium Polymero é de 1 A. A indústria recomenda que as bate- rias de Lithium sejam carregadas a 70% da sua capacidade máxima, ou seja, no nosso caso onde a bateria tem a capacidade de 900 mAh, ela deve ser carregada a no máximo em 630 mA.
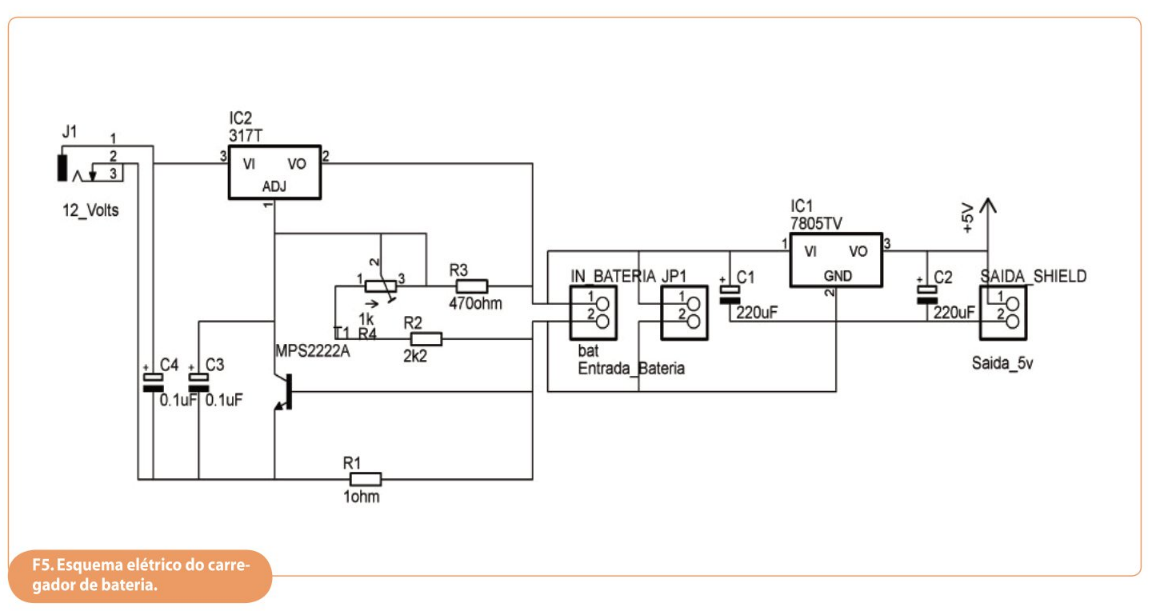
Na figura 5 temos o esquema elétrico que se utilizou. O mesmo foi retirado do site http://shdesigns.org/lionchg.html.
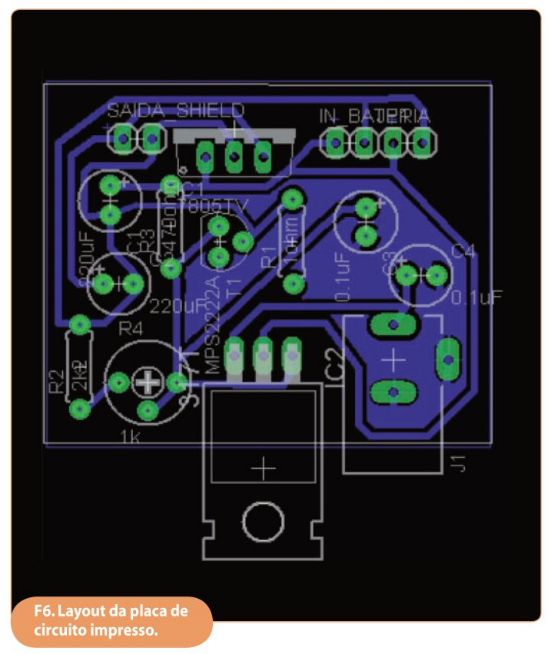
O trimpot R4 é para regular com precisão os 8,4 volts. Veja o layout da placa na figura 6 e a montagem final do carregador na figura 7.