O "Luzbô" é capaz de seguir a "luz" emitida por uma lanterna, permitindo assim o controle do seu movimento para frente, direita ou esquerda. A montagem deste robô é simples e agradará tanto aos leitores iniciantes como também os "avançados". O cérebro deste robô é o versátil Basic Step 1.
Nota: Este artigo saiu numa Mecatrônica Fácil de 2005. Links e sites indicados não mais estão ativos na época da recuperação em 2020.
O "Luzbô" possui dois "LDRs" (resistores dependentes de luz) para "medir" a intensidade luminosa de ambos os lados (voltados para a frente) do robô. Veja a figura 1.
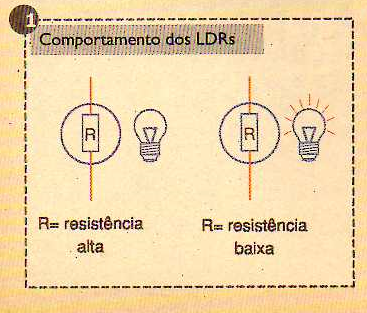
Um LDR opera da seguinte maneira: ao receber luz, sua resistência cai, sempre de acordo com a intensidade luminosa recebida. Quando o mesmo se encontra sem luz, sua resistência ôhmica é bastante elevada.
Ambos os LDRs são posicionados à frente no robô, voltados para baixo. Assim a luz captada será sempre a refletida no chão, emitida por uma lanterna (controle), e não a ambiente (lâmpadas que iluminam o local).
Ao "iluminarmos" um dos lados do robô, o LDR instalado neste lado recebe a luz refletida diminuindo sua resistência ôhmica. Assim, o nível lógico no pino de I/O do Basic Step é alterado. Este nível, quando o LDR não recebe luz mantém-se sempre no estado "1" (Vcc), devido ao "trimpot". Quando o LDR capta a "luz" refletida, o nível lógico é alterado, passando ao estado "0" (GND) devido à baixa resistência presente no LDR.
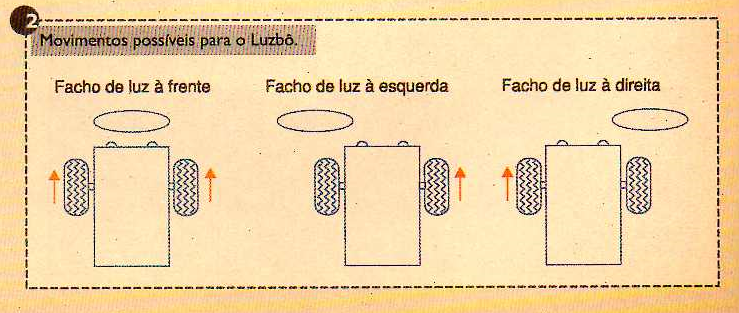
O microcontrolador pode assim, através do programa, perceber a "mudança" nos estados dos pinos de entrada onde os LDRs estão ligados e realizar os movimentos desejados. Ao iluminar a frente do robô, de maneira que ambos os LDRs captem esta "luz", o robô se moverá à frente. Ao iluminar apenas um dos lados, de maneira que apenas um LDR capte a luz e o outro não, o robô executará um movimento de busca com o motor no lado contrário ao LDR que estiver recebendo a luz refletida. Estes movimentos estão demonstrados na figura 2.
O CIRCUITO
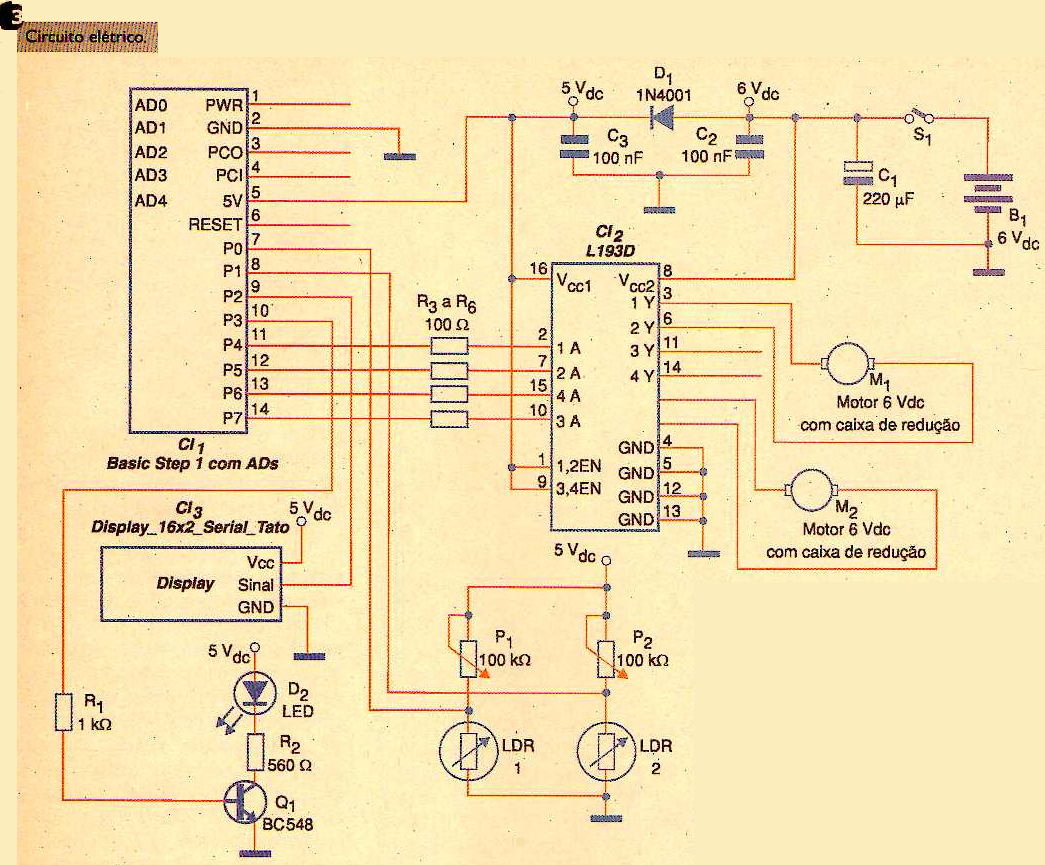
Na figura 3, o leitor tem o circuito elétrico do robô "Luzbô". Apesar de termos utilizados em nosso protótipo um microcontrolador "Basic Step 1" com canais analógicos (C11) para o controle do robô, preferimos adotar uma configuração que não utilizasse tais canais. Assim, os leitores que possuem "Basic Step's" mais antigos (sem a presença dos canais analó-gicos) poderão também experimentar esta montagem.
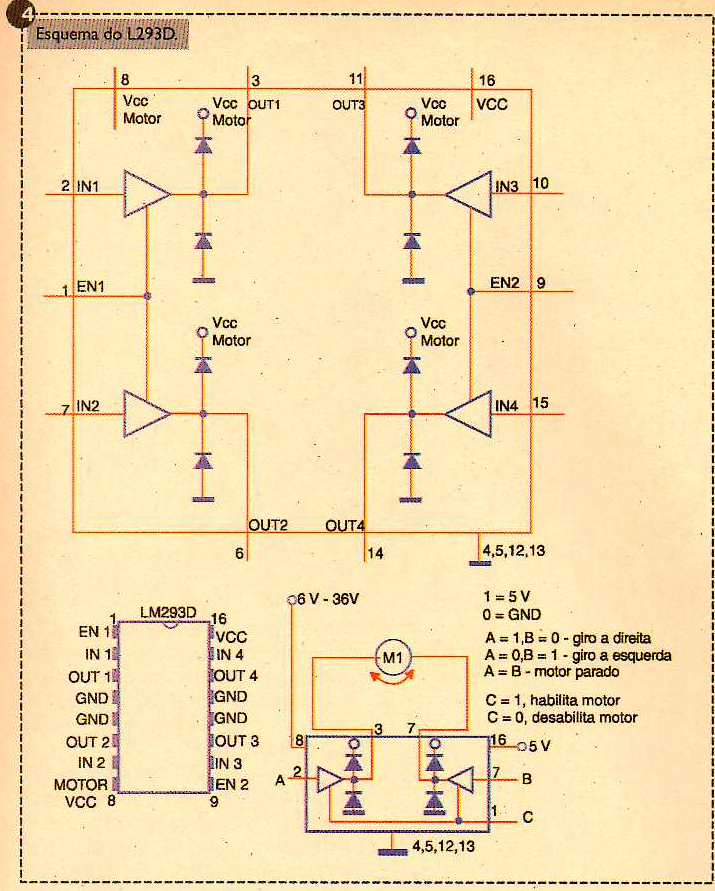
Cl2 (L293D) é um "drive de quatro canais tipo push-pull". A diferença básica entre este componente e o L293 (sem sufixo D), já utilizado em outras montagens, é a presença de diodos internos na versão "D". Aconselhamos aos leitores o uso da versão "D" nesta montagem, pois a mesma não prevê o uso de diodos externos. Na figura 4 temos o esquema do L293D.
O diodo D1 ajuda na queda de tensão necessária para o microcontrolador. A alimentação do circuito é feita por quatro pilhas.
Quatro pilhas ligadas em série "somam" um total de 6 VDC (1,5V x 4). Porém nosso microcontrolador requer uma tensão máxima de 5VDC +/- 10% no pino 5 (entrada para 5 VDC). Assim, ao ligarmos um diodo em série com a alimentação de 6 VDC, este proporcionará uma queda de tensão de 0,7V aproximadamente, colocando a tensão de alimentação nos níveis adequados ao microcontrolador.
Os capacitores C1, C2 e C3 formam os filtros necessários para a operação de Cl1 e Cl2. Os resistores R3 a R6 são resistores limitadores e ajudam a proteger Cl1.
O conjunto R1, R2, D2 e Q1 forma uma "alegoria" visual para o robô. Q1 age como um drive de corrente e tensão para Cl1. Adotamos esta configuração, pois assim o LED a ser utilizado poderá ter um consumo de corrente superior a 20 mA, que é máxima corrente admitida por pino de I/0 do Basic Step.
O display (LCD) é do tipo serial, comercializado pela Tato Equipamentos Eletrônicos (maiores informações no fim do artigo). Este display é opcional no projeto. Ele permite verificar o estado atual de cada um dos LDRs, durante a operação do robô. O leitor com alguma experiência na programação do Basic Step poderá alterar o programa, inserindo outras mensagens que ache relevantes.
Os motores adotados têm tensão de alimentação 6 VDC com caixas de redução. No site da Saber Marketing, wvww.sabermarketing,corn.br, o leitor poderá encontrar as caixas de redução utilizadas em nosso protótipo. Porém, o uso de outras como as retiradas de brinquedos fora de uso, ou mesmo adquiridos especificamente para este fim poderão ser utilizados.
MONTAGEM ELÉTRICA
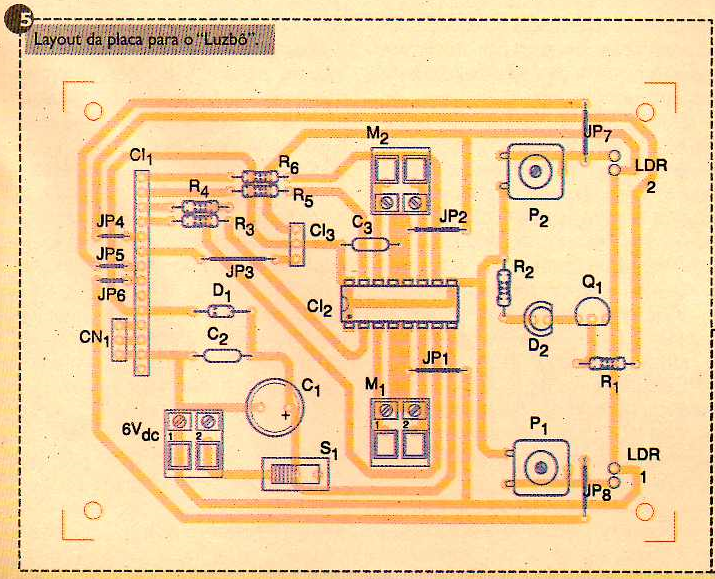
Na figura 5 demonstramos o lay-out para confecção da placa de circuito impresso usada em nosso protótipo. O leitor poderá também realizar a montagem em uma placa padrão ou mesmo matriz de contatos, neste caso apenas para testes do robô ou mesmo para uma rápida demonstração.
Importante
Ao longo de nossas publicações muitas informações foram passadas. Foram dadas dicas "preciosas" de eletrônica, informática e mecânica nas várias montagens sugeridas. Muitas destas dicas dizem respeito ao uso de materiais alternativos mais baratos. Infelizmente, não poderemos repassá-las a cada novo artigo. Aconselhamos, na medida do possível, que nosso leitor complete sua coleção, para poder ter em mãos todas estas importantes dicas e informações. A Saber Marketing comercializa os números atrasados, que não se encontram mais em bancas de jornais.
Tenha cuidado ao soldar os componentes polarizados como capacitores eletrolíticos, diodos, LEDs, transistores, Cls e outros. Qualquer inversão pode ser fatal para o componente e fazer com que o circuito não funcione. Tenha atenção durante a montagem. Use a figura como referência para sua montagem.
Lembre-se de utilizar soquetes para os Cls. Ao montar o microcontrolador, use a metade de um soquete para Cl de 28 pinos. Evite soldar o microcontrolador a placa, pois o mesmo poderá ser utilizado em muitas outras montagens, apenas alterando o programa interno no mesmo.
Os LDRs não são componentes polarizados. Apenas recomendamos que eles não sejam soldados junto à placa. Mantenha os terminais "compridos". Assim será possível voltá-los para baixo, para a detecção da luz refletida no chão.
O LED utilizado em nosso protótipo tem 10 mm de diâmetro e em muitas lojas é conhecido como "LEDÃO". O leitor também poderá utilizar outros LEDs que desejar como um LED azul, branco ou qualquer outro. Apenas tenha em mente que a corrente lc do transistor Q1 é de 500 mA máximos. Seja qual for o LED adotado, a corrente de trabalho do mesmo não deve ultrapassar essa corrente.
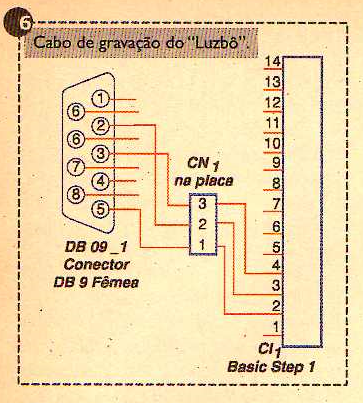
Na placa temos o conector CN1. Ele foi inserido para facilitar a gravação do robô, na própria placa. Para isso o leitor deverá construir o cabo da figura 6.
Os conectores "parafusáveis" adotados em nosso protótipo podem ser ignorados e, neste caso, os fios de alimentação e dos motores deverão ser soldados diretamente na placa.
A chave S1 pode ser soldada diretamente na placa, ou pode-se também utilizar fios para a sua instalação no chassi. Aconselhamos que o "layout" para o chassi seja idealizado antes da ligação de S1 à placa.
O suporte de pilhas a ser adotado dependerá exclusivamente do tamanho das mesmas. Pilhas pequenas do tipo "AA", médias ou grandes (tipo "D") podem ser empregadas.
Os trimpots de 100 kΩ podem ser do tipo vertical com dois terminais ou mesmo horizontal com três terminais. Em nosso protótipo adotamos o do tipo vertical com dois terminais.
MONTAGEM MECÂNICA
O chassi do "Luzbô" foi construído em madeira com as seguintes dimensões: 180 mm de comprimento x 110 mm de largura. Sua configuração -é clássica, com um motor de cada lado. e uma roda "boba" de apoio na parte traseira (ou mesmo à frente). O uso de outros materiais como plástico, ou alumínio ou ainda um outro qualquer, é livre.
Como "adorno" para nosso chassi, utilizamos uma embalagem plástica destas que multas indústrias usam para embalar seus produtos. A aplicação deste "complemento" é opcional.
Caso o leitor vá utilizar as caixas de redução comercializadas pela Saber Marketing, chamamos a atenção para o fato do eixo onde será ligado à roda não ser posicionado de forma centralizada na caixa de redução. Esse detalhe pode ser contornado com o posicionamento das mesmas sob o robô, criando um eixo imaginário para que os eixos fiquem em uma linha única (centralizados). Veja a figura 7.

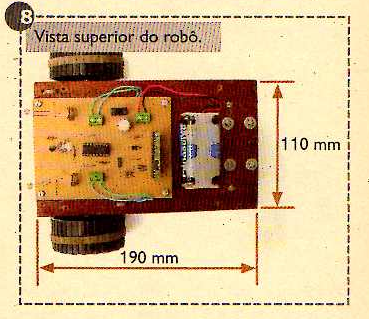
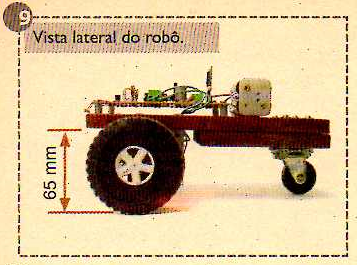
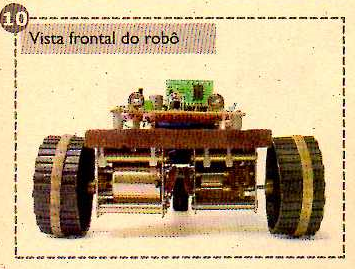
Para auxiliar nosso leitor na montagem do "Luzbô", de acordo com nosso protótipo, o mesmo poderá se basear nas figuras 8, 9 e 10. Nestas figuras temos a vista superior, lateral e frontal do nosso protótipo com as principais medidas.
As rodas aplicadas em nosso protótipo foram "extraídas" de um carrinho de plástico. Acrescentamos um elástico com 5 mm de largura (que pode ser adquirido em qualquer papelaria) para melhorar a aderência do robô ao chão. Este elástico foi colado com "cianocrilato" (adesivo tipo instantâneo).
A montagem da placa no chassi deve ser feita de maneira que os LDRs fiquem na frente do robô e possam ser
Dica
Pilhas, chuveiros, ventoinhas de computadores (utilizamos a embalagem de uma em nosso protótipo), e muitos outros produtos são embalados dessa forma. Ao comprar um produto embalado desta forma, se puder, guarde a embalagem para usá-la posteriormente em seus robôs. As formas mais inusitadas podem ser obtidas com o uso das mesmas voltados para baixo. Veja as figuras deste artigo para compreender como posicionar os LDRs.
Caso o leitor adote um outro tipo de chassi, onde a colocação da placa seja inviável à frente' no robô, aconselhamos o uso de fios para ligar os LDRs a placa. Assim, a montagem dos mesmos ficará independente da montagem da placa no chassi.
O PROGRAMA
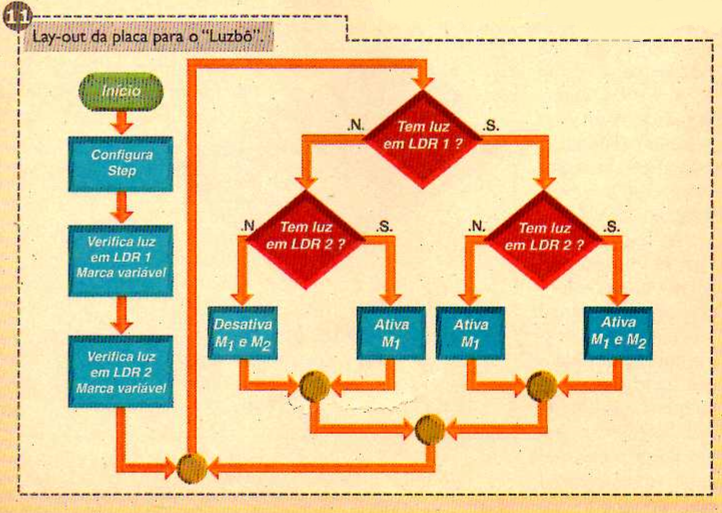
Na figura 11 o leitor tem o fluxograma do programa de controle do robô "Luzbô". O programa encontra-se disponível em nosso site para download. Veja, no final deste artigo, o endereço para fazer o download.
O programa foi ricamente comentado para facilitar a sua compreensão. O leitor notará que existem duas versões para o mesmo programa. Uma versão foi desenvolvida para ser executada em Basic Steps com firmware 2.6 ou superior (versões do Basic Step 1 com cinco canais ADs) e uma outra para ser executada em versões com firmware inferior a 2.6 (versões sem canal AD).
Observando o fluxograma e o programa (é aconselhável fazer o download do mesmo e abri-lo no compilador indicado, antes de prosseguir com a leitura das linhas a seguir), fica fácil compreender seu funcionamento.
O programa inicia algumas variáveis, configura os pinos de I/O para entrada ou saída. Em seguida o nome do robô será mostrado no display. Após isto, o programa passa a analisar as entradas onde os LDRs estão ligados. Primeiro P1 e depois P2. Se a entrada P1 informar um valor lógico igual a "1" (Vcc) o microcontrolador considera que o LDR não está recebendo luz e "anota" isto em uma variável. Caso contrário, a informação é trocada na variável. Logo em seguida o microcontrolador analisa a porta P2. A mesma operação realizada anteriormente é feita, e uma outra variável recebe o estado do pino de I/O.
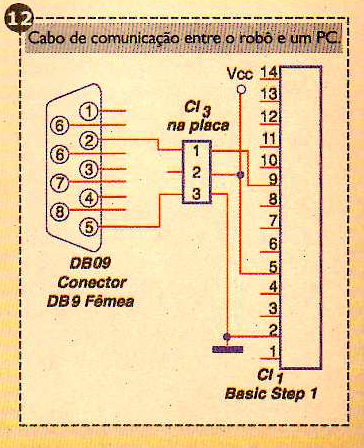
A presença ou não de luz em ambos os LDRs são informados no display. O uso deste, como dito anteriormente é opcional. Porém seu uso poderá ajudar na regulagem do robô. Caso o leitor não disponha do display ou não queira utilizar um neste projeto, poderá visualizar os dados enviados pelo microcontrolador em um PC com o auxílio de um cabo a ser montado, de acordo com a figura 12. Mais à frente detalharemos como proceder com a regulagem do robô através de um PC.
Após marcar as duas variáveis e informar a situação dos LDRs no display, o programa realiza a análise das variáveis já descritas. Se ambos os LDRs estiverem recebendo a luz refletida no chão, o robô se moverá para frente. Se apenas um dos LDRs receber luz, o robô se moverá para o lado do LDR que está recebendo luz no intuito de equilibrar o sistema (ambos os LDR com luz). Neste momento apenas um dos motores é colocado em movimento.
Caso nenhum dos LDRs receba luz, o robô se manterá parado até que um facho de luz seja colocado à frente do robô.
O programa também inverte o estado da porta P3, onde está ligado o transistor Q1. Assim o mesmo é levado ao corte e a saturação a cada ciclo (leitura dos LDRs). Dessa forma, podemos observar o "piscar" do LED (efeito visual do robô).
Importante: É importante que o leitor "leia" atentamente os comentários no início de cada programa por nós fornecidos, pois eles trazem informações importantes sobre o tipo e a versão do microcontrolador, o tipo e versão do compilador; além de outras informações importantes. Muitos leitores desatentos a isto têm encontrado problemas ao usar os programas fornecidos, simplesmente por não "darem a devida atenção" a estas linhas internas em cada programa.
Obs: O leitor iniciante no mundo dos microcontroladores deve ter notado que o estudo do esquema elétrico, junto ao estudo do programa conferem a máxima compreensão do funcionamento geral do projeto. Procure, sempre que possível, estudar o circuito e o programa juntos. Um auxiliará na compreensão do outro.
TESTE E USO
Recomendamos sempre ao final de cada montagem, que seja feito uma "verificação" na mesma. Isso é de suma importância. Não tenha pressa em colocar "tudo funcionando". Um erro não observado pode comprometer um componente qualquer. Verifique tudo com cuidado e atenção. Desenho da placa, soldas, posição dos componentes, polaridades, etc. É melhor perder alguns minutos em uma simples verificação a ganhar uma bela dor de cabeça!
Grave o programa no microcontrolador, insira as pilhas no suporte, e ligue o robô (S1). Caso o leitor tenha utilizado o display poderá ver o nome do robô escrito no mesmo. Em seguida o LED começará a piscar. Dependendo da quantidade de luz recebida nos LDRs (que devem estar voltados para baixo) um ou outro, ou ainda ambos os motores poderão girar. Ajuste P1 e P2 para que os motores fiquem parados. Este ajuste deve ser feito com o robô no chão. Este ajuste também pode variar de acordo com cada piso (cor e nível de reflexão de cada um).
Com o auxílio de uma lanterna, aponte o facho de luz da mesma para o chão' à frente de um dos LDRs e observe a reação do robô. Se o mesmo se movimentar para a frente é sinal que ambos os LDRs estão recebendo luz. Neste caso, afaste um pouco os LDRs e/ou aponte-os um pouco para fora. Se mesmo assim o problema persistir, observe se sua lanterna não tem um facho de luz muito largo. As melhores lanternas para o controle do "Luzbô" são justamente as que possuem o facho mais estreito e mais dirigido.
Caso o movimento seja justamente para o lado do LDR que está "percebendo” a luz, o movimento está correto. Caso contrário, troque as ligações de M1 e M2 na placa.
Faça o mesmo com o outro lado do robô. Retoque o ajuste em P1 e P2 para obter a melhor sensibilidade nos LDRs em relação ao facho de sua lanterna e ao tipo de piso.
Aponte o facho para a frente do robô, posicionando-o bem no meio. O robô deverá andar a frente.
Se os movimentos estiverem corretos, seu robô estará pronto para uso. Lembre-se que, dependendo da quantidade de luz presentes no ambiente e também do tipo de piso onde o robô será demonstrado, um novo ajuste em P1 e P2 pode se fazer necessário.
Dica
Lembre-se que o display do robô mostra a situação de cada LDR (presença ou não de luz). A observação deste poderá ajudai- o leitor na regulagem e montagem final do robô. Para aqueles que não têm um display, detalhamos anteriormente um cabo que poderá ser utilizado em conjunto com um PC, durante a regulagem. Mais à frente damos as dicas de como utilizar este cabo.
AJUDA COM PROBLEMAS
A seguir, listamos alguns pontos observados em nosso laboratório e que com certeza ajudarão o leitor na busca de problemas, se estes existirem:
Meu robô parece não funcionar, o LEO não pisca, os motores não giram, nada funciona!
Possíveis soluções:
- Verifique a alimentação: pilhas e a ligação do suporte das mesmas na placa.
- Cheque se S1 está ligado.
- Confirme a gravação do programa no microcontrolador Basic Step 1.
O LED pisca, mas ao apontar o facho da lanterna conforme descrito, nada acontece!
Possíveis soluções:
- Verifique a ligação dos motores ao circuito.
- Cheque se os motores não têm um dreno de corrente excessivo. Tente ligá-los fora do robô com um conjunto de 4 pilhas idênticas as utilizadas no robô e veja se os mesmos se movimentam adequadamente.
- Confirme se os LDRs estão apontados para o chão de maneira a receberem a luz refletida no chão.
- Observe se o facho de luz não é fraco demais. Troque a lanterna utilizada nos testes.
- Reajuste P1 e P2.
- Troque o local de testes, escolhendo um piso mais claro em relação ao utilizado nos primeiros testes. Evite carpetes e tapetes. O nível de reflexão destes não é dos melhores.
Meu robô gira apenas para um lado. Ao que parece apenas um LIDA está recebendo luz!
Possíveis soluções:
- Refaça o ajuste no trimpot no lado que parece não funcionar.
- Verifique se o LDR está apontado para baixo e se sua inclinação é a mesma que o do lado que funciona adequadamente.
- Cheque a trilha que liga o LDR ao microcontrolador.
- Retire o LDR do circuito e verifique se o mesmo está funcionamento adequadamente. Use um multímetro na posição de leitura de resistências. Ao receber a luz, o LDR deve apresentar baixa resistência. Sem luz (impeça a incidência desta com a mão ou algo opaco e de cor escura) a resistência deve ser alta.
Meu robô funciona, mas move-se sempre à frente!
Possíveis soluções:
- Verifique a largura do facho da lanterna utilizada. Se for muito largo, ambos os LDRs receberão luz e o robô se movimentará sempre à frente. Troque a lanterna ou afaste ao máximo os LDRs, de maneira a que os mesmos recebam apenas as extremidades do facho de luz, quando este for posicionado a frente do robô.
Eu não tenho um display serial instalado no robô! É possível ver as mensagens enviadas ao display de uma outra maneira, para auxiliar na regulagem do robô?!
- Sim, é possível. Monte o cabo proposto na figura 12 e ligue-o a um PC, em um canal serial livre. Não serve se o mesmo já estiver sendo utilizado! (pelo mouse, por exemplo). Com o auxílio de um programa terminal como o Hiper Terminal do Windows, é possível ver os dados passados pelo microcontrolador ao display. A configuração para o uso deste programa está em nosso site.
CONCLUSÃO
A montagem proposta neste artigo é relativamente simples. Procuraremos sempre que possível, trazer montagens que possam contemplar os vários "níveis" em que se encontram nossos leitores. Esperamos assim ajudar o leitor "iniciante" como também o "avançado". E lembre-se que estamos sempre abertos a suas críticas e sugestões, afinal, a Revista espera atender a todos! Boa montagem e até a próxima!