









Este artigo mostra como construir e programar um robô simples, seu objetivo principal é ampliar a discussão sobre Robótica e incentivar a participação dos leitores na elaboração de alterações e novas implementações no ROBÔ COP8.
Este artigo faz parte de uma antiga série que o autor publicou a partir de 1997. Na seção de microcontroladores o leitor poderá ter mais informações sobre o COP8 em artigos do autor.
Mais uma vez estamos envolvidos na elaboração de um artigo sobre robôs. Quando publicamos o artigo do STAMP BUG (Saber n° 302), dissemos do fascínio que o robô representa para o ser humano. Comprovamos isso através do sucesso do robô inseto, com vários leitores entrando em contato com a redação da revista. Assim, resolvemos fazer um projeto de um robô simples, que permitisse ao leitor confeccioná-lo todo, inclusive a parte lógica que utiliza um microcontrolador COP8.
Mas o objetivo do artigo é ampliar a discussão sobre Robótica e incentivar os leitores a colaborarem com envio de sugestões de modificações e implementações no ROBÔ COP8. Essa discussão já começou na Internet no Fórum da revista (www.edsaber.com.br), onde vários leitores estão trocando ideias e experiências e devido a este sucesso, vamos reservar um espaço na Internet dedicado à Robótica. Na revista, reservaremos um espaço especial para mostrar colaborações, sugestões e toda a movimentação em torno do assunto.
Pessoalmente, acredito que conseguiremos concentrar muitas pessoas e instituições. E futuramente teremos condição de organizar um grande evento com palestras, exibições e competições! Por isso não deixe de enviar suas sugestões, colaborações e ideias!
O ROBÔ COP8
Na figura 1 observamos o ROBÔ COP8 montado e operacional, que é basicamente composto de:
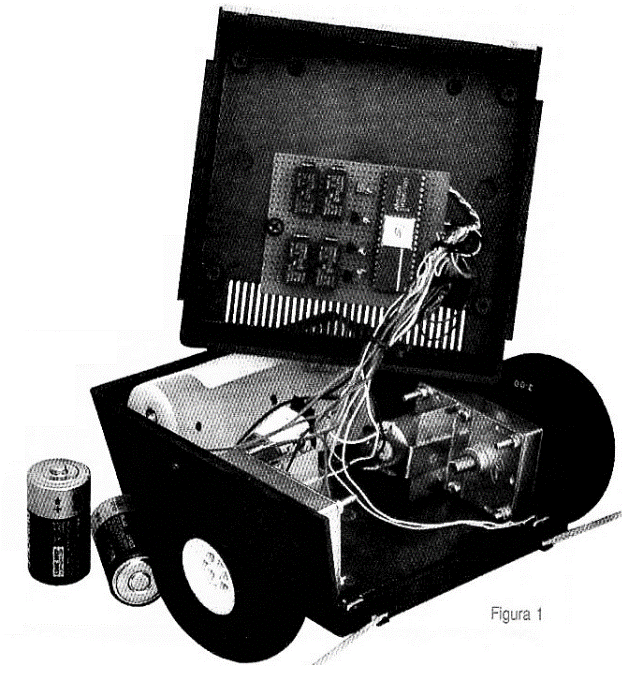
1 - Base
2 - Motores
3 - Sistema Lógico de Acionamento
4 - Sensores
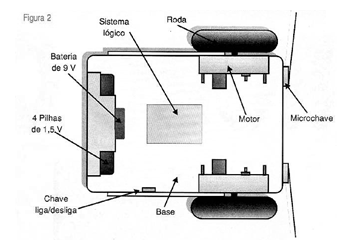
Na figura 2 temos a visualização dos módulos.
BASE
Para a base utilizamos uma caixa Patola, modelo PB-211, foram feitos cortes e furos necessários à fixação dos motores, chaves, suporte de bateria e placa de circuito. O leitor pode optar por qualquer outra base que julgue mais conveniente. A nossa opção por essa caixa se deve à facilidade de acondicionar todos os elementos e ser facilmente encontrada em lojas especializadas em Eletrônica.
MOTORES
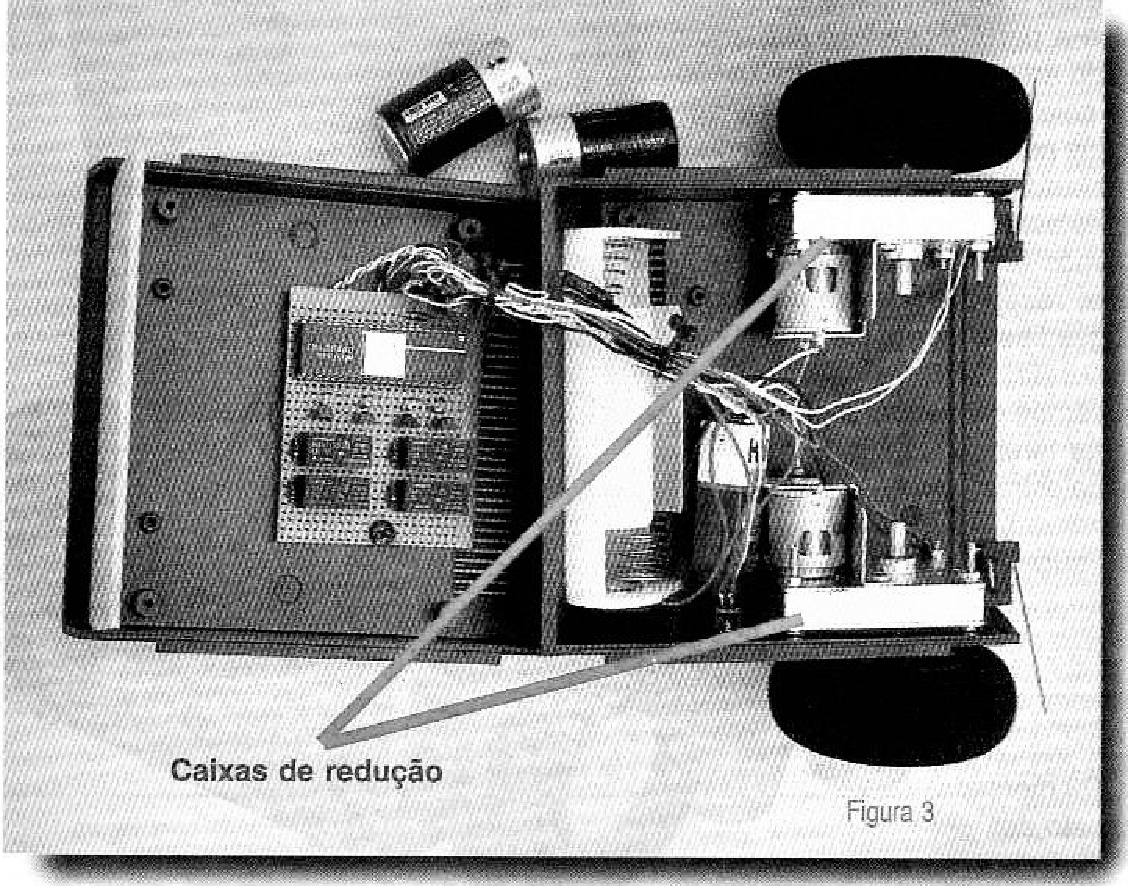
Os motores foram escolhidos com caixa de redução (veja figura 3), facilitando assim a construção da mecânica. Foram colocados internamente à Base para que ficassem totalmente embutidos. A única alteração foi a inversão dos 4 parafusos de fixação da caixa de redução.
As rodas utilizadas foram de aeromodelos, com 3 polegadas de diâmetro, facilmente encontradas em lojas especializadas. A alteração necessária exigir uma nova furação no centro das rodas para rosquear no eixo do motor.
SISTEMA DE ACIONAMENTO
Decidimos utilizar relés devido a sua facilidade de implementação. O ideal seria uma ponte em ''H" com transistores, mas deixaremos essa modificação por contados leitores. Os reles são de 5 V com contatos duplos, seu acionamento é feito através de um transistor NPN (BC337). O Controle Lógico ficou a cargo de um microcontrolador COP8, que dá nome ao Robô, o modelo escolhido foi o COP8SAC740 de 40 pinos, que vem como amostra na EPU (Evoluation Programming Unit).
SENSORES
São microchaves (microswitchs) com hastes longas, posicionadas de tal maneira (figura 4) que estando o ROBÔ COPE em movimento, ao encontrar um obstáculo, estas são acionadas, fazendo com que o robô realize uma manobra de desvio.
O CIRCUITO
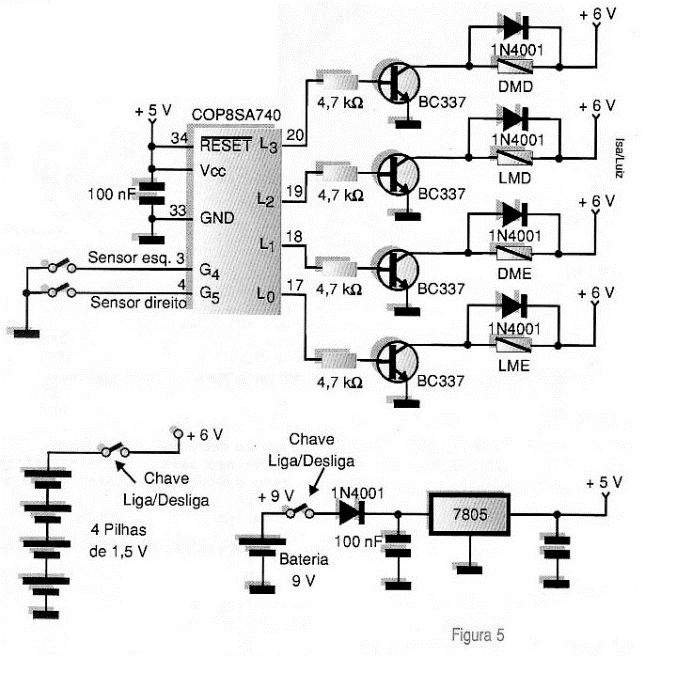
Podemos observar a simplicidade do circuito mostrado na figura 5 (esquema elétrico). Notar que o COP8 está configurado para utilizar clock interno (aproximadamente 5 MHz com ciclo de instrução de 2 microssegundos).
A alimentação do COP8 é feita através de um regulador de tensão e uma bateria de 9 V, deixando as 4 pilhas de 1,5 V somente para a parte de potência (motores e reles).
Essa configuração foi escolhida para isolar as alimentações, sendo que a parte de potência não afeta a parte de controle da CPU. Notar que as micro chaves estão conectadas diretamente no COP8 sem a necessidade de pull ups, uma vez que no programa, o Port de I/O é configurado para entrada com pull up interno.
MONTAGEM E TESTE DO CONJUNTO
Monte o conjunto, iniciando pelas furações para fixação dos motores e micro chaves na caixa Patola, fixe os motores e as micro chaves. Após montar a placa de circuito, usando uma placa padrão, faça as ligações restantes para os motores, micro chaves e baterias, conforme ilustrado também no esquema elétrico (figura 5).
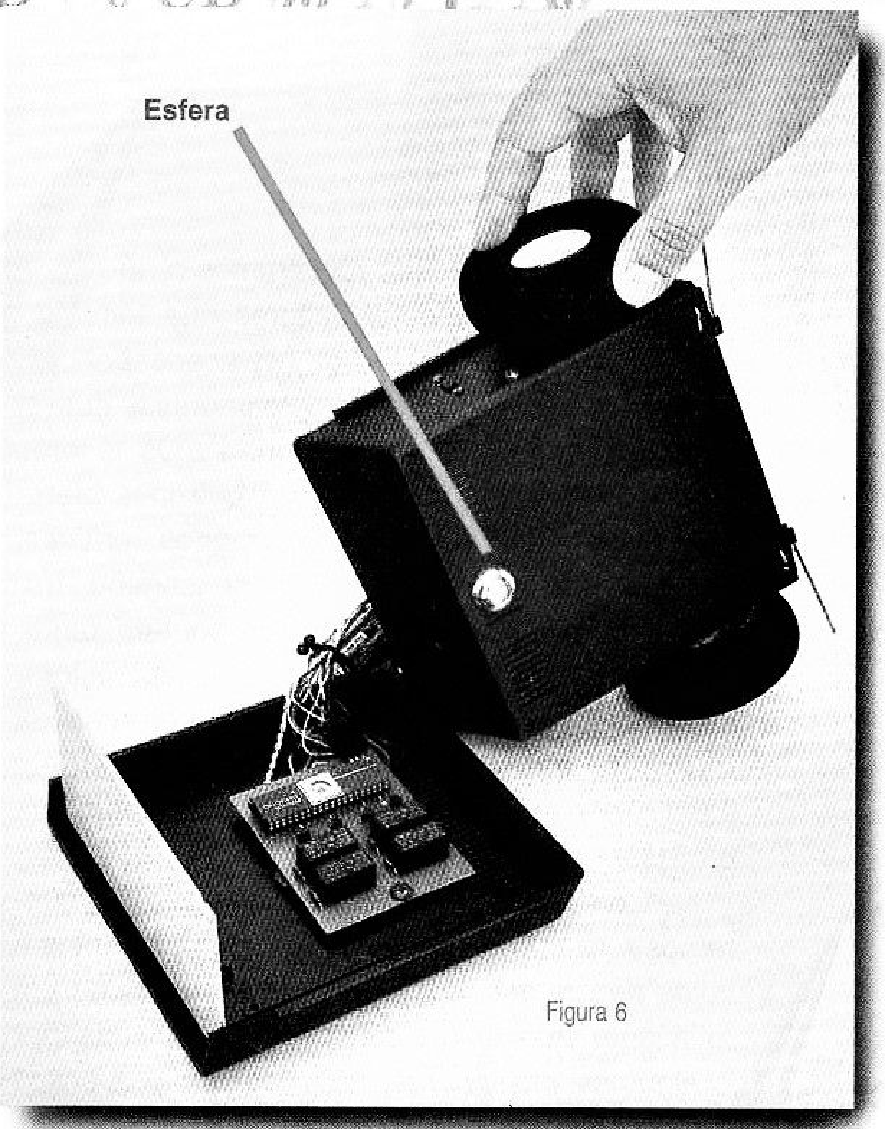
Programe o COP8 com o programa da listagem anexa, coloque-o no circuito. Coloque as baterias e ligue o sistema, de início, os reles que ligam os motores deverão ser acionados e esses conduzirão o robô para frente. Se estiver com a rotação invertida, altere as ligações dos motores. Agora teste as micros chaves. Acionando a da esquerda, o robô deverá fazer uma manobra de desvio para a direita e vice-versa. Se estiver fazendo o contrário, troque as ligações das chaves. Antes de fechar o robô, devemos colocar um apoio na traseira do mesmo, para facilitar as manobras. Colocamos uma semiesfera (ver detalhe na figura 6), mas o leitor poderá utilizar uma roda do tipo rodízio igual às de carrinho de supermercado.
O PROGRAMA
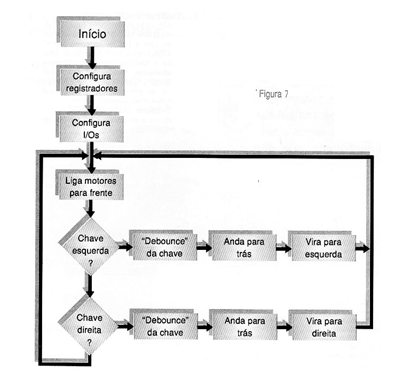
Na figura 7 temos o fluxograma simplificado do programa gravado no COP8. Basicamente, ele faz com que o ROBÔ COP8 ande para frente e se encontrar um obstáculo (acionamento das micros chaves), faça uma manobra de recuo e vire para o lado oposto. Observar na listagem do programa que o tempo da manobra para virar à esquerda é três vezes maior que para virar à direita. As manobras de 'VOLTA", "VIRA À ESQUERDA" e "VIRA À DIREITA" foram colocadas em sub-rotinas, facilitando assim uma eventual mudança na programação.
ALTERANDO O ROBÔ COP8
A partir desse modelo simples, o leitor poderá sofisticar o robô, mudando o sistema de alimentação, acionamento de motores, colocando mais sensores (ultrassom, infravermelho), fazendo comunicação sem fio (RF) com uma central de controle (PC), entre outras alterações.
CONCLUSÃO
Esperamos ter atingido o objetivo de despertar o interesse do leitor para a discussão sobre Robótica e mostrar como podemos fazer um robô simples. Aguardamos sugestões e ideias!










