









Leia este artigo e monte seu próprio controle remoto para barcos, carrinhos, robôs e outros veículos, usando componentes comuns e com um alcance de 50 a 200 metros. Damos versões que podem ter de 3 a 10 canais e são fáceis de ajustar, permitindo o acionamento de muitos dispositivos nos modelos controlados. O sistema é modulado em tom, com grande seletividade, e não utiliza bobinas especiais de difícil construção ou obtenção. Esta é a sua oportunidade de desenvolver um projeto de controle remoto realmente interessante.
Obs. O artigo é de 1988, mas utiliza componentes atuais.
Um dos projetos mais fascinantes do mundo da eletrônica é o que envolve o radiocontrole. Através de ondas eletromagnéticas emitidas por um simples transmissor em nossas mãos, podemos ter um controle total sobre o movimento de modelos distantes como barcos, aviões, carros ou mesmo robôs.
E é claro, saindo das aplicações recreativas, podemos abrir ou fechar portas de garagens, acionar lâmpadas ou outros dispositivos, tudo isso sem sair do lugar!
Já publicamos diversos projetos de controles usando ondas eletromagnéticas (ondas de rádio), mas sempre com alguma simplicidade, ou seja, envolvendo apenas um controle ou canal.
Com um único canal podemos controlar apenas um tipo de movimento do modelo, o que limita sua capacidade de ação e também o realismo que ele pode ter.
Atendendo à pedidos de leitores, passamos agora a uma versão mais avançada, que pode ser montada com 3 canais ou mais. O número máximo de canais é 10, dada a dificuldade de se ter um ajuste perfeito com número maior sem o uso de equipamentos especiais.
Com este número de canais teremos vários modos de atuação do modelo dirigido à distância. Com um canal podemos controlar o motor, com mais dois podemos dirigi-lo para a direita ou esquerda, com um quarto canal podemos reverter o motor para que ele vá para trás e finalmente com um quinto canal podemos acionar lâmpadas, buzinas, sirenes etc.
Não precisamos ir além dos 5 canais para que você perceba tudo o que pode ser feito com tal sistema.
O sistema que propomos se baseia na modulação de tom, sendo bastante simples de montar e ajustar, e possibilitando alcances de até 200 metros conforme os componentes usados.
Os poucos ajustes, tanto do transmissor como do receptor, fazem deste projeto algo ideal para os leitores que possuem alguma habilidade de montagem, mas não têm equipamento avançado à sua disposição para operações de calibração complicadas ou críticas.
As principais características do projeto são:
a) Transmissor
Tensão de alimentação: 6 a 9 V
Alcance: 6 V - BF494 = 50 metros
6 V - 2N2218 = 100 metros
9 V - 2N2218 = 200 metros
Tipo de modulação: por tom
Frequências de modulação: 300 a 8 000 Hz
Número de canais: 3 a 10
b) Receptor
Processo de recepção: super-regenerativo
Número de transistores: 3
Frequência de operação: 72 MHz
Tensão de alimentação: 6 V
Consumo de corrente em repouso: 20 mA (tip.)
c) Filtros
Tipo de filtro: PLL
Tensão de alimentação: 6 V
Consumo de corrente em repouso: 5 mA (tip.)
Corrente máxima por relé: 2 + 2 A
Sensibilidade de entrada: 250 mV (tip.)
Número de integrados para 2 canais: 3
Tecnologia usada: CMOS
O CIRCUITO
A ideia básica do sistema é simples: um transmissor emite um sinal modulado em tons de diversas frequências cada um selecionado de acordo com a função que se deseja para o modelo controlado.
O receptor recebe o sinal do transmissor e decodifica os tons que são aplicados a um filtro. O filtro reconhece a frequência do comando e aciona o relé correspondente, o qual é responsável pelo controle do dispositivo que se deseja ativar ou desativar (figura 1).

Tudo isso é muito simples quando analisado de uma forma geral, mas para termos os circuitos na prática, as explicações devem ir um pouco além e por partes, conforme fazemos a seguir.
TRANSMISSOR
O transmissor tem duas etapas: uma responsável pela produção do sinal de baixa frequência (sinal modulador) e outra pelo sinal de alta frequência (portadora), conforme observamos peio diagrama esquemático da fig. 2.

O sinal de alta frequência que dá origem às ondas de rádio é produzido por um oscilador que tem um único transistor operando em torno de 72 MHz.
Quem determina esta frequência é a bobina L1, que em conjunto com o trimmer CV permite o ajuste para operação num ponto do espectro em que não exista nenhuma estação que possa causar interferência e, muito mais que isso, permite ajustar a operação de modo que ela seja na mesma frequência que o receptor pode captar.
O receptor também tem seu ajuste, permitindo que ambos “fujam" das frequências que possam estar ocupadas ou sujeitas a interferências.
No projeto final damos três opções para a montagem desta etapa, que é quem determina o alcance do transmissor. Usando um BF494 e alimentação de 6 V, que é o modo mais simples, temos aproximadamente 50 metros de alcance, o que nos permite operar tranquilamente dentro de uma sala ou mesmo num quintal pequeno.
Para maior alcance podemos utilizar um 2N2218 alimentado com 6 V, que chega aos 100 metros, ou então com 9 V, chegando a mais de 200 metros, o que seria necessário para um barco num pequeno lago ou então um carrinho ou robô num quintal de maiores dimensões.
Uma potência maior também é importante para os locais sujeitos a interferências.
O sinal da etapa de alta frequência é modulado por um tom de baixa frequência gerado por um integrado 555.
Conforme o número de canais, temos a quantidade de frequências que o oscilador produz. Cada frequência é obtida ajustando-se um trimpot e apertando-se um interruptor de pressão que o coloca no circuito.
Há, entretanto, uma frequência que está constantemente sendo transmitida e que tem por finalidade manter um relé no receptor em permanente acionamento, o que é necessário conforme o tipo de aplicação. Assim, no caso de um barco ou veículo terrestre é interessante manter o motor em funcionamento durante as suas manobras.
Como só podemos transmitir um tom de cada vez, ou seja, um comando, em condições normais o motor teria que ser desligado por um momento para que pudéssemos virar para direita, virar para a esquerda ou então fazer o acionamento de qualquer outro dispositivo.
Com o recurso de um relé de tom permanente, não ligado a filtros, mesmo com a mudança de comando, ele ainda permanece acionado atuando sobre o motor.
No entanto, desligando o transmissor o motor para, já que este relé deixará de ser energizado. Veja que, com isso temos um controle perfeito sobre o motor, sem precisar interromper sua alimentação durante os demais comandos.
Na figura 3 temos os gráficos que ilustram essas operações.

Um ponto importante a ser observado no projeto de transmissores de controle remoto que funcionam por tons, é que os filtros são sensíveis a harmônicas, ou seja, podem disparar não só com um sinal de determinada frequência como também com seus múltiplos.
Assim, se transmitirmos um sinal de 200 Hz para acionar o primeiro filtro de um sistema que possua também um. filtro para 800 Hz, estaremos correndo o risco de acionar os dois canais ao mesmo tempo.
Isso significa que deveremos escolher as frequências dos filtros de tal modo que uma não seja múltipla da outra. Esta precaução ”enche" o espectro de frequências, dificultando bastante a operação com mais de 10 canais, conforme salientamos no início no artigo.
O número ideal de canais, para não haver muita dificuldade de ajuste, está em torno de 5.
O jumper cotocado no transmissor (J) serve para a função de tom permanente, para acionamento do relé de motor no caso de pequenos modelos.
Se você quiser desativar esta função ou usar um canal suplementar bastará substituir esse jumper por um interruptor de pressão ou simplesmente eliminá-lo.
RECEPTOR
Para termos um receptor simples e sensível, com a possibilidade de captar os sinais nas distâncias previstas, a melhor solução é a que faz uso de etapas super-regenerativas.
Com este tipo de circuito a seletividade é pobre, o que significa que devemos ter cuidado para não ajustar a operação para frequências em que existam estações próximas ou em que haja congestionamento de operadores de controle remoto.
Por outro lado a sensibilidade é enorme, bastando dizer que durante o ajuste do protótipo, em que fizemos uso de um fone de ouvido ou pequeno amplificador captamos com clareza o chamado de um avião a mais de 50 quilômetros do local em que nos encontrávamos e ouvimos a resposta da torre de controle do aeroporto a aproximadamente 7 quilômetros de distância.
Durante o ajuste, você poderá captar as estações de FM no extremo superior da banda prevista, mostrando a sensibilidade do sistema.
Na figura 4 temos o diagrama esquemático do receptor, por onde observamos que ele conta com uma etapa super-regenerativa com o transistor BF494, que oferece excelente ganho na faixa sintonizada.

O sinal é selecionado em CV e L1, que são os componentes mais críticos da montagem.
A bobina L1 deve ser enrolada de modo que tenha exatamente as mesmas características da bobina do transmissor, para que fique sintonizada na mesma frequência; sem essa precaução o receptor não conseguirá captar o sinal do transmissor e o sistema não funcionará.
O trimmer CV consegue compensar pequenas diferenças, servindo para um "ajuste fino”.
O trimpot P1 é o ajuste de sensibilidade (ganho) dessa etapa.
O sinal captado, que é detectado de modo a ficar apenas com o tom de áudio, é amplificado por um transistor (Q2) e daí tem dois rumos: o primeiro é para o relé de acionamento permanente (que fica na mesma placa), e o segundo para os filtros de tom, que correspondem aos canais de controle e ficam numa placa à parte.
Veja que se utilizarmos apenas a primeira placa já teremos um controle remoto de um canal.
FILTROS
Passamos então ao terceiro bloco do projeto, que consiste em filtros PLL com o integrado CMOS 4046 e tem seu diagrama esquemático para dois canais mostrado na figura 5.

No site o leitor encontrará o princípio de funcionamento deste PLL e de outros equivalentes, pois se trata de assunto relativamente longo e que encontra outras aplicações interessantes.
O que podemos dizer é que, em função dos valores de C3 e C4, o circuito é "'amarrado" de modo a produzir uma oscilação em sua saída apenas para uma determinada frequência de entrada; para outras frequências o circuito permanece inoperante.
O sinal de saída, depois de detectado por um diodo e amplificado por um transistor, é usado para acionar um relé.
Os valores para os capacitores que determinam a frequência de operação dos filtros são escolhidos dentro da faixa do espectro em que podemos operar.
Na tabela a seguir relacionamos algumas frequências e os correspondentes valores de C3 e C4.
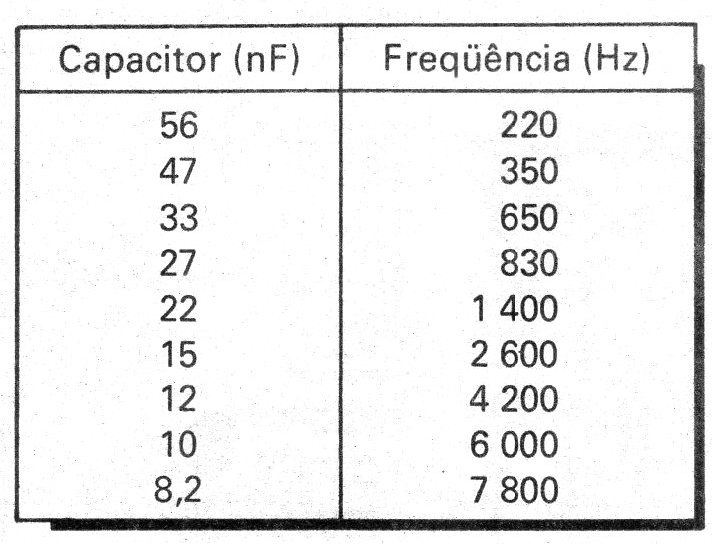
Podemos associar capacitores de modo a obter valores intermediários.
MONTAGEM
A placa de circuito impresso para o transmissor (versão de 3 canais) é mostrada na figura 6.

Para este circuito temos 3 opções:
a) Uso do BF494 e alimentação de 6 V, com 56 ohms para R5 - caso em que temos um alcance de 50 metros.
b) Uso do 2N22187 e alimentação de 6 V, com 27 ou 33 ohms para R5 – caso em que obtemos 100 metros de alcance. Nesta versão R3 passará a ter 6k8 e R4 5k6.
c) Uso do 2N2218 e alimentação de 9 V, com 27 ou 33 ohms para R5 e demais componentes inalterados - caso em que temos 200 metros ou mais de alcance. Com uso de dissipador em Q1 podemos alimentar o circuito com 12 V, obtendo um alcance ainda maior.
Os resistores são de 1/8 ou ¼ W e todos os capacitores são cerâmicos, exceto C1 que também pode ser de poliéster.
A antena é do tipo telescópico com pelo menos 30 cm de comprimento e a bobina L1 é formada por 4 espiras de fio rígido com diâmetro de1cm.
Para a alimentação sugerimos o uso de pilhas pequenas ou médias.
Não é interessante empregar bateria, pois dado o consumo de corrente, sua durabilidade será reduzida.
A placa de circuito impresso para o receptor é mostrada na figura 7.

Os relés são micro relés para 6 V, que por seu tamanho e peso reduzidos, são ideais para montagens compactas.
O trimmer é comum de base de porcelana ou equivalente e a bobina é idêntica à do transmissor.
Os resistores são todos de 1/8 ou ¼ W e os capacitores são de acordo com a lista de material. Sugerimos não substituir os tipos indicados como cerâmicos por outros, principalmente na etapa de recepção, pois isso poderá acarretar sérios problemas de funcionamento e até a inoperância.
Os transistores são comuns e admitem equivalentes, exceto Q1, que deve ser o BF494 ou BF495.
XRF é um choque de filtro que admite duas opções: pode ser um microchoque comercial de 47 uH ou 100 uH ou então feito em casa, enrolando-se de 40 a 60 voltas de fio esmaltado 32 num resistor de 1ook x1/8 W e ligando seus terminais em paralelo com o resistor depois de raspar bem o fio esmaltado.
Os eletrolíticos são para 6 V ou mais.
Finalmente temos, na figura 8, a placa de filtros para dois canais.

Veja que podemos ampliar o sistema aos pares, o que quer dizer que para cada placa que acrescentamos aumentamos o número de canais em 2 unidades.
Muito cuidado deve ser tomado no manuseio dos integrados, que podem facilmente danificar-se pelo contato com pontos de alta tensão, pelo aquecimento, ou simplesmente por um toque acidental em seus terminais em determinadas condições.
Por esse motivo, recomendamos que se utilizem soquetes e só instalem os integrados na placa depois de completa toda a montagem.
Os capacitores podem ser cerâmicos, de poliéster ou styroflex, já que não se trata de etapa crítica em relação à frequência.
Os resistores são de 1/8 ou ¼ W e os diodos admitem equivalentes como o 1N914.
Será interessante soldar os capacitores C3 e C4 provisoriamente com terminais longos, antes de se fazer os testes de operação. Somente depois de verificar que são os valores ideais para a aplicação é que deve ser feita sua soldagem definitiva.
PROVA E USO
Na figura 9 temos o modo de ligação do sistema para a operação com 3 canais (2 de atuação momentânea e um permanente).

Podemos ligar LEDs em todas as saídas para facilitar o ajuste, conforme mostra a mesma figura.
O procedimento para ajuste é o seguinte:
a) Ligamos na saída indicada um fone de cristal (não serve outro tipo), ou a entrada de um amplificador e a alimentamos o circuito com 6 V (receptor).
b) Ajustamos em primeiro lugar P1 e CV para obter chiado ou mesmo a captação de sinais de estações locais.
O ajuste deve ser tal que se elimine qualquer apito de regeneração.
Normalmente se obtém maior sensibilidade quando o trimpot está posicionado um pouco antes de começar o apito.
c) Depois, ligamos o transmissor (com o jumper J no circuito) e ajustamos CV do transmissor e do receptor, assim como P3 do transmissor até captar no fone ou amplificador um apito com máxima intensidade. O transmissor deve ficar pelo menos a 2 metros do receptor.
d) Com a captação do sinal com máxima intensidade, o relé do receptor (permanente) deve ser ativado.
Podemos ajustar P2 para máxima sensibilidade do relé, afastando o transmissor o máximo possível. O ajuste de P1 do receptor deve ser feito para a posição de maior resistência (tom mais grave) que feche o relé permanente (K1) do receptor.
e) A seguir, desligamos J e passamos a ajustar a placa do transmissor em relação ao filtro. Ajustamos então P1 do transmissor para que um dos relés do filtro seja ativado (S1 deve estar apertado), o que será indicado pelo acendimento de um dos LEDs.
f) O próximo passo consiste em apertar S2 e ajustar P2 no transmissor para que o segundo relé do filtro seja ativado e acenda o LED correspondente.
g) Retoque todos os ajustes para obter o máximo de sensibilidade e alcance.
h) Se captar estações próximas no fone ou amplificador, procure afastar a frequência do sistema mudando ao mesmo tempo os ajustes de CV do receptor e do transmissor.
INSTALANDO O SISTEMA
Podemos tomar como exemplo um barco que serviu de modelo para aplicação deste sistema de controle remoto. Para cada tipo de modelo deve haver um procedimento específico de instalação da parte mecânica.
Na figura 10 temos uma sugestão de controle para barco, onde 0orelé permanente é usado para o motor e os relés dos filtros usados para o leme.

Para a parte de movimentação do leme sugerimos o mecanismo mostrado na figura 11, que consiste no emprego de um motor com redução a elástica.

Este motor atua sobre o leme podendo girar em dois sentidos; um sentido é dado pela ativação de um dos relés (canal 1) e o outro sentido é dado pela ativação do outro canal (canal 2), que inverte a polaridade do motor.
Com suficiente folga no sistema de transmissão, não temos problema de fim de curso para o leme, pois o eixo do motor simplesmente patinará.
Para outros tipos de veículos temos na seção de mecatrônica do site diversos artigos com soluções práticas de controle.
a) Transmissor
CI-1 - 555 - circuito integrado
Ql1- BF494 ou 2N2218 - ver texto - transistores de RF
L1 - bobina (ver texto)
CV - trimmer comum 2 – 20 pF ou equivalente
P1, P2, P3 - trimpots de 100 k
S1, S2 - interruptores de pressão
S3 - interruptor simples
B1 – 6 V ou 9 V - ver texto – pilhas pequenas ou médias
A - antena telescópica de 30 a 70 cm
R1 - 4k7 x 1/8 W - resistor (amarelo, violeta, vermelho)
R2 – 22 k x 1/8 W - resistor (vermelho, vermelho, laranja)
R3 – 10 k x 1/ 8 W - resistor (marrom, preto, laranja)
R4 - 8k2 x 1/ 8 W - resistor (cinza, vermelho, vermelho)
R5 - 56 ohms x 1/8 W - resistor (verde, azul, preto) - ver texto
C1 – 22 nF - capacitor cerâmico ou de poliéster
C2 – 100 nF - capacitor cerâmico ou de poliéster
C3 - 1OnF - capacitor cerâmico ou de poliéster
C4 - 4n7 - capacitor cerâmico
C5 - 8p2 - capacitor cerâmico
Diversos: placa de circuito impresso, suporte de pilhas, caixa para montagem, fios, solda etc.
b) Receptor
Q1 - BF494 - transistor de RF
Q2, Q3, Q4 - BC548 ou equivalentes - transistores NPN de uso geral
D1 - 1N34 ou 1N60 - diodos de germânio
D2 - 1N4148 ou 1N914 - diodo de silício
Kl - relé de 6 V
S1 - interruptor simples
P1- 47 k - trimpot
P2 – 100 k - trimpot
XRF - choque de RF - ver texto
CV - trimmer comum 2-20 pF ou equivalente
L1 - bobina de antena - ver texto
B1 – 6 V - 4 pilhas ou bateria
R1 – 47 k x 1/8 W - resistor (amarelo, violeta, laranja)
R2 – 10 k x 1/ 8 W - resistor (marrom, preto, laranja)
R3, R4 - 3k3 x 1/8 W - resistores (laranja, laranja, vermelho)
R5 - 2M2 x 1/8 W - resistor (vermelho, vermelho, verde)
R6 – 22 k x 1/ 8 W - resistor (vermelho, vermelho, laranja)
R7 – 120 k x 1/8 W - resistor (marrom, vermelho, amarelo)
R8 - 5k6 x 1/8 W - resistor (verde, azul, vermelho)
C1 - 22 uF x 6 V - capacitor eletrolítico
C2, C4 – 1n2 - capacitores cerâmicos
C3 - 4,7 pF ou 5,6 pF - capacitor cerâmico
C5, C7, C8 – 100 nF ~ capacitores cerâmicos
C6 – 33 nF - capacitor cerâmico
C9 - 47 uF x 6 V - Capacitor eletrolítico
A - antena telescópica ou fio esticado de 20 a 50 cm
Diversos: suporte para pilhas ou conector, fios, solda, placa de circuito impresso etc.
c) Filtro (2 canais)
CII-1, CI-2 - 40467- PLL CMOS - circuitos integrados
CI-3 - 4001 - circuito integrado CMOS (4 portas NOR)
Q1, Q2 - BC548 ou equivalentes - transistores NPN
D1, D2, D3, D4 - 1N4148 ou equivalentes - diodos de silício
K1, K2 – microrrelés para 6 V
R1, R3, R5, R6, R7, R8 – 100 k - resistores (marrom, preto, amarelo)
R2, R4 – 120 k - resistores (marrom, vermelho, amarelo)
R9, R10 – 1 k - resistores (marrom, preto, vermelho)
C1, C2, C4 - 10 nF - capacitores de poliéster ou cerâmica
C3 – 22 nF - capacitor cerâmico ou poliéster
C5, C6, C9 – 100 nF - capacitores cerâmicos ou de poliéster
C7, C8 – 150 nF ou 220 nF - capacitores cerâmicos ou de poliéster
C1O – 10 uF x 6 V - capacitor eletrolítico
Diversos: placa de circuito impresso, soquetes DIL de 14 e 16 pinos para os integrados, fios, solda etc.










