Um controle sem tios de velocidade ou ainda brilho e temperatura é o interessante projeto que levamos aos nossos leitores. Operando tanto com cargas de corrente contínua, bem como, cargas de corrente alternada, ele encontra uma enorme gama de aplicações interessantes que vão desde o simples controle de velocidade de um pequeno motor de corrente contínua (caixa de redução) até do brilho de uma lâmpada. Simples de montar, este projeto usa componentes comuns em nosso mercado.

Controles remotos podem ser elaborados de inúmeras formas com desempenhos dos mais diversos, que depende de como e do que se pretende comandar a distância. Para os meios de transmissão, podemos ter: desde os sistemas por sinais de rádio até aqueles que usam ultrassons ou mesmo luz.
Para os tipos de controle temos desde o simples liga-desliga até a inversão de rotação de um motor ou ainda uma variação de velocidade. O nosso sistema é do tipo óptico e tem 10 graus de controle de velocidade ou intensidade.
Outra característica importante está no fato de podermos comandar cargas de baixa tensão em corrente contínua e alta tensão alternada. Isso nos leva as seguintes possibilidades de aplicação prática:
* Controle de velocidade de um motor num automatismo de baixa tensão, como abertura de janelas, movimentação de cortinas ou ainda robôs.
* Controle de brilho para pequenas lâmpadas
* Controle de velocidade para pequenos barcos comandados à distância.
* Dimmer para lâmpadas comuns de um quarto ou sala, controlando a partir de sua poltrona.
* Controle de velocidade para motores universais, como por exemplo: um ventilador.
CARACTERÍSTICAS:
• Tensão de alimentação: 6 a 12 V - setor de baixa tensão 6 a 12 V p/ a carga 110 ou 220 VCA p/ maiores potências
• Sistema de controle: por pulsos
• Número de passos de potência: 10
• Alcance: 10 a 20 metros
COMO FUNCIONA
Na figura 1 temos um diagrama em blocos para nosso controle remoto de potência.

O bloco de entrada consiste num monoestável feito em torno de um 555 que tem a finalidade de produzir um pulso único de curta duração independentemente das variações que o sinal emitido pelo transistor possa sofrer. Na entrada do 555 ligamos um sensor, que no caso é um LDR cuja finalidade é receber os sinais do transmissor. O transmissor pode ser unia pequena lanterna ou qualquer outra fonte de luz que possa ser dirigida para o receptor, conforme mostra a figura 2.

Em série com o sensor existe um controle de sensibilidade. Montando o sensor num tubo com uma lente convergente, podemos obter grande sensibilidade e diretividade. Na verdade, se houve linha direta entre o receptor e o transmissor, sem qualquer obstáculo o alcance poderá facilmente superar os 20 metros. Veja que o sensor não pode sofrer a ação da iluminação ambiente daí a necessidade de o focalizarmos na direção de onde vem o pulso de luz do transmissor.
Os pulsos enviados pelo transmissor e que são convertidos em sinais retangulares de duração constante são aplicados no bloco seguinte de nosso projeto que consiste num contador até 10 com o circuito integrado 4017. No nosso projeto não há necessidade de, partirmos de uma posição de mínima potência daí não termos um Reset automático na hora de ligação. Isso, no entanto pode ser acrescentado com a ligação mostrada na figura 3.

Neste contador, o nível alto avança por cada saída com os pulsos de saída do 555. Em cada saída ligamos um resistor de valor diferente, formando assim um sistema escalonado de acionamento do circuito seguinte. Cada resistor aplicará na etapa seguinte (SCR ou transistor) urna corrente diferente que determinará a velocidade ou potência do dispositivo controlado. Os valores dos resistores dependerão do tipo de controle desejado. Damos duas tabelas para esta finalidade:


Na verdade, dependendo da faixa de controle desejada estes valores podem ser alterados.
Os blocos de acionamento são dois.
Para o caso de um SCR o resistor de saída do 4017 em conjunto com sua capacidade determina a frequência de operação de um oscilador com transistor unijunção. Uma característica que deve ser levada em conta em algumas aplicações é que este oscilador pode combinar seu sinal com a frequência da rede que resulta num batimento de muito baixa frequência capaz de fazer a lâmpada cintilar.
Este problema pode ser resolvido com pequenas alterações de ajustes ou de valores do capacitor no emissor do transistor unijunção. Para o caso do circuito de corrente contínua, não temos esse possível problema.
Dois transistores são ligados como amplificador Darlington e no coletor de segundo temos a carga a ser controlada que tanto pode ser o motor de uma caixa de redução como uma pequena lâmpada incandescente.
Tanto no caso do SCR como do controle de corrente contínua podem ser feitas alterações dos resistores para que tenhamos uma variação segundo a faixa desejada. Uma possibilidade interessante para os que desejarem sofisticar o projeto consiste na troca dos resistores por trimpots.
Veja que em nossas tabelas temos 10 passos de ida e volta, ou seja, a potência aplicada sobe de um mínimo até um máximo para depois voltar suavemente até zero. Se o leitor quiser pode ter 10 passos de subida com um retorno rápido ao mínimo no final, (figura 4).

A alimentação do setor de controle pode ser feita com pilhas comuns ou fonte. No entanto, recomendamos que a etapa de controle de motores seja alimentada por fonte independente. Isso é importante para se evitar que a comutação do motor cause disparo errático do 4017 mudando de forma imprevisível a velocidade. Um capacitor em paralelo com o motor, conforme sugerido no projeto ajuda a evitar este problema, mas dependendo do tipo de motor, não pode ser suficiente para eliminá-lo.
MONTAGEM
Na figura 5 temos o diagrama básico do módulo receptor.

A placa de circuito impresso para este setor é mostrada na figura 6.

Para os circuitos integrados sugerimos a utilização de soquetes DIL e o LED1, detector de acionamento é opcional. Os resistores são todos de 1/8 W com 5 a 20% de tolerância e o capacitor C1 pode ser de poliéster ou cerâmico.
O LDR é comum como o FR-27 ou equivalente. O capacitor C2 é um eletrolítico com tensão de trabalho da mesma ordem que a tensão usada na alimentação ou maior. Os diodos são de uso geral. Para acionamento de um motor de corrente contínua ou ainda uma lâmpada temos blocos de acionamento da figura 7.

A placa de circuito impresso para este módulo é mostrada na figura 8.
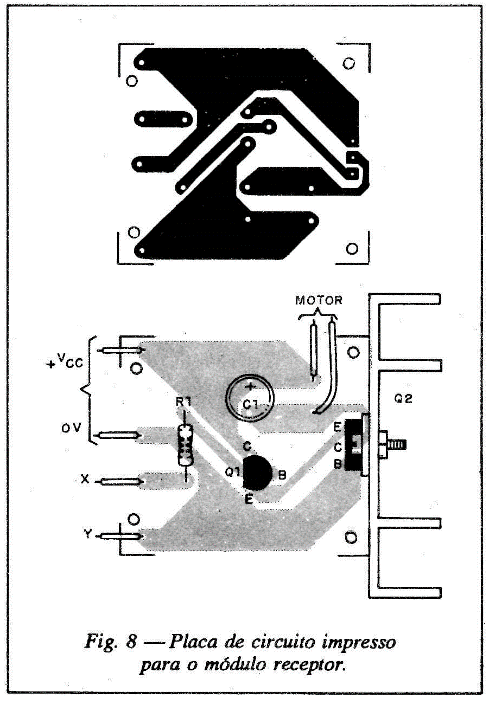
O transistor TIP31 deve ser dotado de um radiador de calor. Motores de 3 a 12 V com corrente até 1 ampères podem ser controlados por este circuito.
O capacitor C1 pode ter valores entre 47 µF e 470 µF e visa eliminar os transistores de comutação do motor. Em série com R1 pode ser ligado um trimpot de 47 Ict-2 para permitir o ajuste da faixa de acionamento.

A alimentação +Vcc não precisa ser necessariamente a mesma de bloco receptor. Na figura 9 temos o diagrama de bloco para o controle a partir da rede de alimentação, no caso X1 uma lâmpada incandescente. A placa de circuito impresso para este módulo com potências até 300 W na rede de 110 V e 600 W na rede de 220 V é mostrada na figura 10. O SCR deve ser dotado de um radiador de calor. Lembramos que os SCRs são controles de meia onda e que, portanto, o controle de 0 a 50% no máximo da potência do aparelho a ele ligado.
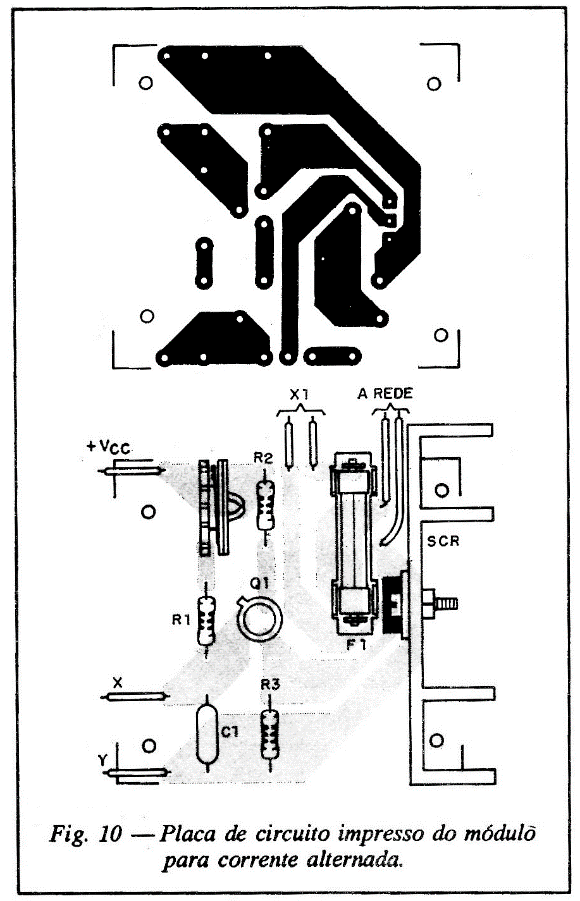
Não devem ser ligadas cargas indutivas ou aparelhos eletrônicos a este controle. Para termos um sistema de onda completa podemos usar o circuito da figura 11.

Os diodos devem ter correntes da mesma ordem que a máxima exigida pela carga controlada. Os resistores são de 1/8 W e o capacitor C1 pode ser cerâmico ou de poliéster. P1 é um trimpot comum que serve para ajustar o limiar do disparo ou a operação em condições do mínimo.
PROVA E USO
O transmissor pode ser uma pequena lanterna de uma ou duas pilhas pequenas. Ligue o receptor com uma carga qualquer e ajuste a sensibilidade do sistema em P1 para que o LED indicador (LED1) pulse atendendo ao controle do transmissor.
Pulse em sequência para verificar o acionamento da carga. Se houver alguma falha ele pode ser devido a problemas de inversão dos diodos ou então do próprio CI-2. Se não obtiver a faixa desejada de velocidades ou potências altere os resistores das saídas dos 4017. Os valores destes resistores podem variar sensivelmente em função da tensão de alimentação do setor de potência e também do ganho dos transistores. Se usar fonte separada para a carga, as duas fontes devem ter um terra comum conforme mostra a figura 12.

Para a versão de alta tensão observe que existe um setor comum de terra de alta e de baixa tensão. Comprovado o funcionamento é só fazer a instalação definitiva do aparelho.