









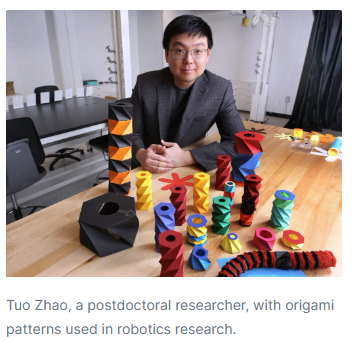
Um robô em forma de verme foi criado a partir de uma técnica origami foi desenvolvido por pesquisadores da Universidade de Princeton. O robô é formado por segmentos macios independes que podem produzir um movimento semelhante ao de uma lagarta. Associados os segmentos formam o robô que tem então um movimento coordenado. A ideia é de que no futuro os robôs possam crescer, autorreparar e desenvolver novas funções. Assim, os segmentos podem se separar em determinados momentos e funcionar de maneira independente. Para o pesquisador Tuo Zhao o maior desafio foi desenvolver o controle do movimento para os segmentos que operam por um sistema eletrotérmico que acreditamos se com base em SMA shape Memory Alloys O artigo original se encontra no link abaixo.
Notícia original: Caterbot? Robotapillar? It crawls with ease through loops and bends - Princeton Engineering

Assista mais em : https://www.youtube.com/watch?v=mJtlEwxQj2E








