









Este artigo tem como intenção, mostrar noções básicas ao leitor que deseja utilizar o microcontrolador PIC da família PIC1605X. Utilizaremos o PlC16C54A por ser o mais simples e um dos mais utilizados. Recomendamos ao leitor que leia o artigo Microcontroladores PIC dessa edição para que possa entender melhoro que iremos expor a seguir. Foi escolhida uma aplicação extremamente simples, um LED pisca-pisca, na qual o leitor poderá compreender algumas funções básicas no microcontrolador.
Analise o esquema, e veja que o LED está ligado no Port A bit 0. A saída do PIC fornece até 25 mA, o suficiente para acender um LED diretamente. O leitor observa também que foi utilizado como clock do PIC um oscilador RC, poderia ter sido usado um cristal, no PIC essa definição é feita na hora da programação do componente.
Este oscilador RC gerará uma frequência aproximada de 4 MHz o que resultará em um tempo de instrução de 1 microssegundo. O pino de reset (-MCLR), está colocado diretamente no +5 V, neste caso não necessitando de um circuito de “Power on Reset”, pois existe um interno componente.
A montagem fica extremamente fácil e pode ser feita em protoboard ou em placa padrão.
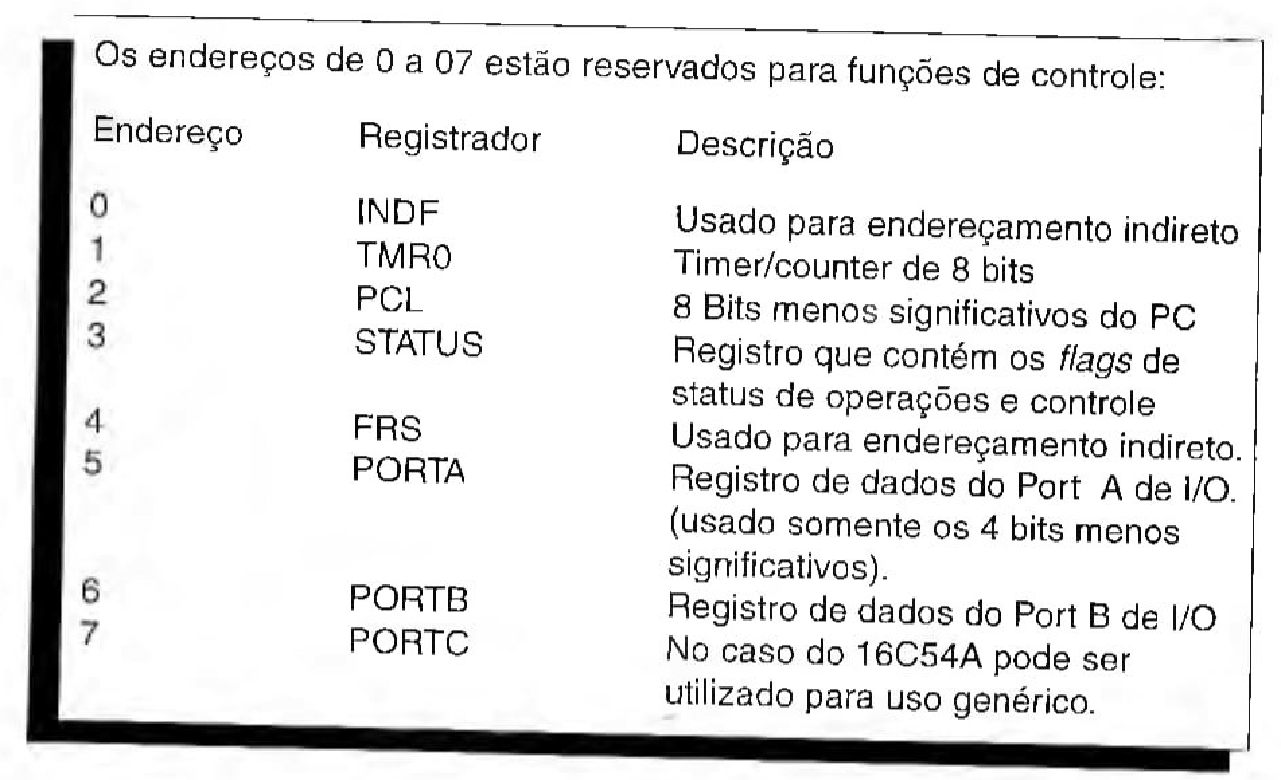
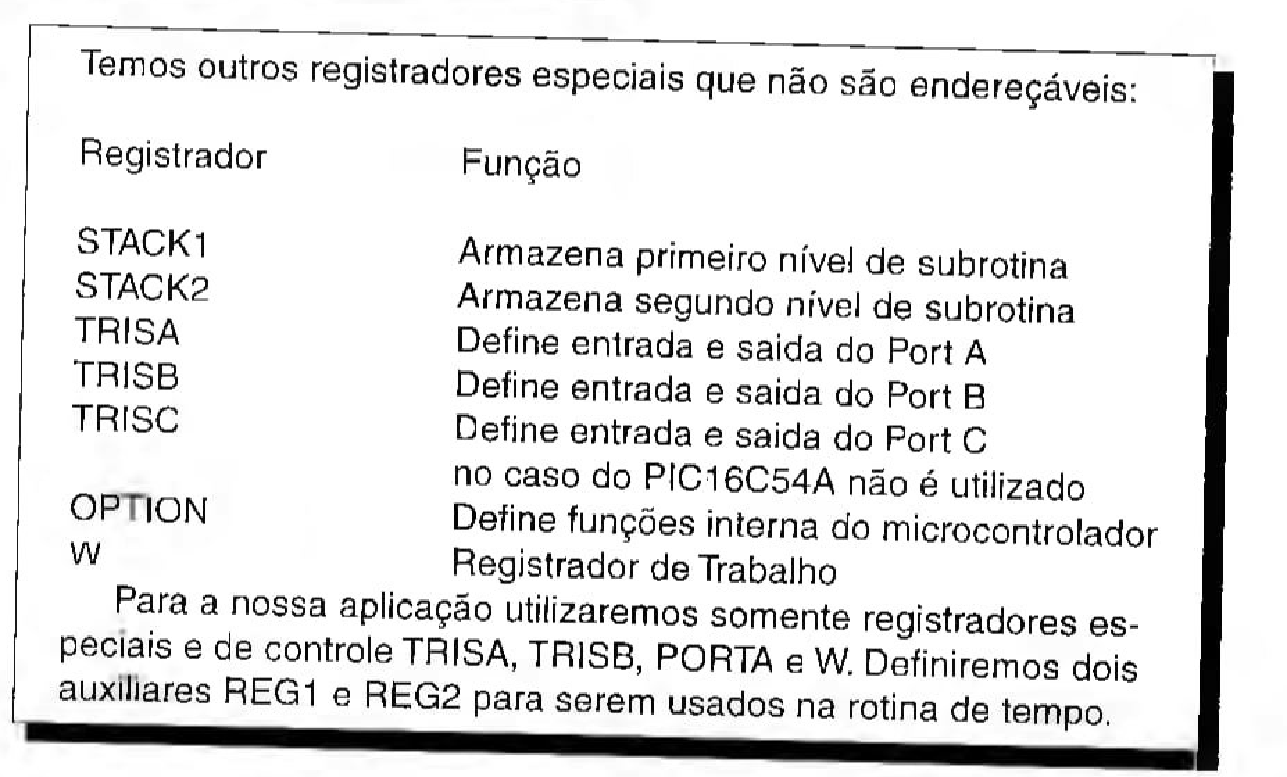
Como alimentação usaremos uma bateria de +9 V, caso o leitor tenha uma fonte estabilizada de +5 V poderá utilizá-la e suprimir o regulador de tensão. Antes de entrarmos na programação, temos que falar um pouco da arquitetura interna do PIC16C54A. A área de programa é de 512 bytes; ela está endereçada de 0 a 1FF em hexadecimal, sendo que o endereço 1FF é o endereço de inicialização após o reset. A área de RAM chamada de “Register file” tem disponível 32 bytes endereçados de 0 a 1F em hexadecimal.
O leitor pode observar que o programa está estruturado em cinco partes:
Definição dos registradores auxiliares e de Label
Inicialização
Programa Principal
Sub-rotina de Tempo
Endereço do Reset
Fica assim fácil de se fazer uma adaptação para outra aplicação, ou mesmo uma alteração nesta.
Este programa pode ser digitado em qual quer editor de texto não gráfico, como o EDIT do DOS.
Antes de gravar o programa no microcontrolador, temos que transformar este programa em um arquivo que contenha as instruções formadas em números hexadecimais. Para isso usamos o programa Assemblador que no nosso caso além de verificar a sintaxe e outros erros montará o arquivo no formato hexadecimal que o gravador do PIC irá manusear no processo de gravação.
Caso o leitor queira antes de gravar o PIC e testara no circuito, simular o funcionamento do programa, poderá utilizar um Simulador, visualizando o funcionamento do programa e a movimentação dos dados internamente do microprocessador. Como este programa é executado em um PC, não é possível simular na velocidade de funcionamento do microcontrolador, ou seja, alguns segundos de funcionamento do microcontrolador propriamente dito, podendo levar vários minutos para ser simulado no PC.
Existe um equipamento chamado “Emulador” que tem uma função parecida com a do Simulador no que diz respeito à visualização dos dados internos, só com a vantagem de poder substituir um microprocessador no circuito e funcionar na sua velocidade.
Então não devemos confundir Simulação com Emulação, que são duas coisas parecidas, mas com finalidades bem especificas.
Uma vez o programa testado e “Assemblado”, poderemos gravá-lo e testá-lo no circuito.
No processo de teste é sempre conveniente o leitor usar um microcontrolador de desenvolvimento (com janela), para poder apagar o componente e reutilizá-lo para as correções ou alterações do programa.
CONCLUSÃO
Como foi dito no início do artigo, o objetivo era mostrar noções básicas para que o leitor se ambientasse com o componente e analisasse o seu funcionamento em uma aplicação muito simples.
Tanto é que os assuntos abordados não foram aprofundados e muitos outros nem citados devido ao espaço disponível, mas nas próximas edições iremos ter oportunidade de explorar melhor e em detalhes o PIC.










