









Descrevemos neste artigo o funcionamento de um controle PWM com o 555, mostrando que não basta alterar a largura de pulso diretamente, mas que também é preciso manter a frequência fixa. Analisamos que, com as características desse componente precisamos de alguns artifícios para que um controle total correto seja obtido. O artigo é baseado em live em que explicamos isso e que pode ser acessada pelo link dado no artigo.
Nota: artigo publicado na revista Eletrônica INCB - 2023
Começando pelo PWM
A forma mais simples de se controlar a velocidade de um motor DC ou de uma carga qualquer num circuito é pela colocação de um resistor variável em série, um reostato que permite dosa a corrente, conforme mostra a figura 1.


Este tipo de controle é denominado linear ou analógico, pois controla linearmente a corrente na carga. No entanto, ele apresenta sérias desvantagens se quisermos ter um controle perfeito.
Quando ligamos uma resistência em série e ela provoca uma queda de tensão, ela dissipa calor, perdendo na forma de calor a potência que deveria ser aplicada a carga, mas que não desejamos. Não é uma boa solução.
A melhor solução e que é adotada na maioria dos dispositivos em que desejamos controlar a potência aplicada tais como fontes chaveadas, carregadores de celulares, controles de motores é a que faz uso de pulsos.
Para entender como funciona, vamos partir da figura 2 em que temos um sinal retangular, inicialmente com uma duração de pulso igual ao intervalo entre eles, ou seja, com um ciclo ativo de 50%.

O que ocorre neste caso é que se alimentarmos uma carga com esta tensão ela vai receber na média 50% da potência. Podemos calcular a potência pela porcentagem que o pulso representa e área em relação ao sinal completo.
Qual a vantagem? Se usarmos um transistor para comutar este sinal ele terá um rendimento muito maior no circuito pelas suas características de comutação.
Quando um transistor é usado num controle linear ele funciona como um resistor, apresentando assim uma resistência que diminui à medida que precisamos de mais corrente, mas essa resistência dissipa calor.
Quando usamos como comutador ele passa de resistência infinita para resistência zero num tempo muito curto. A subida do pulso e depois o inverso na descida do pulso.
Ora, com resistência infinita não há corrente e a dissipação e zero e com resistência nula a dissipação é zero. Em sua, não há dissipação de calor ou perda no dispositivo de controla.
Na prática isso não ocorre porque os transistores comuns ou FETs não são perfeitos precisando de um tempo para passar do estado de não condução para plena condução (saturação). Nesse intervalo apresentam uma resistência que dissipa calor, conforme mostra a figura 3.

Os transistores modernos, no entanto. são tão rápidos que podem comutar tão rápido que a dissipação é mínima. Por isso temos placas de controles de motores com transistores muito pequenos que praticamente não dissipam potência e podem controlar correntes intensas, conforme mostra a figura 4.

Indo além, depois de vermos a vantagem de usar pulsos, é que podemos controlar a potência aplicada mudando a largura do pulso e portanto o ciclo ativo.
Com pulsos mais estreitos temos menor potência média aplicada a carga e com pulsos mais largos, potência maior, conforme mostra a figura 5.

Na prática podemos ir de perto de 1% a 99% do controle. Porque não o controle total de 0 a 100%?
Com 0 simplesmente cortamos a alimentação e com 100% aplicamos a tensão diretamente. É vantagem em muitos casos manter o circuito que gera os pulsos funcionando.
Controlamos então a carga variando a largura do pulso produzido, ou seja, modulando a largura do pulso, daí o nome PWM ou Pulse-Width Modulation que traduzido do inglês nos leva a modulação de largura de pulso.
Um fato importante que deve ser observado é que nesse tipo de modulação quando aumentamos a largura do pulso, a sua separação ou tempo baixo diminui na mesma proporção de modo que o tempo de um ciclo se mantém e portanto, a frequência. Na PWM a largura do pulso muda, mas a frequência se mantém.
O 555
Sem dúvida, quando pensamos em aplicações que gerem sinais retangulares de baixas frequências, não existe solução melhor do que o 555 é uma delas é justamente em controles PWM.
No entanto, quando muitos de nossos leitores pensaram em usa o 555 num PWM se depararam com diversos problemas que vamos justamente solucionar nas linhas seguintes.
Para entender essas soluções, vamos partir do circuito básico de um astável com esse componente para gerar sinais retangulares que pretendemos usar num controle PWM. O circuito bem conhecido é mostrado na figura 6.

Conforme podemos ver pela figura 7, o tempo de duração do pulso depende de Ra enquanto o intervalo entre os pulsos depende de Ra e também de Rb.

Ra e Rb determinam o tempo de carga do capacitor enquanto Rb o tempo de descarga. Isso significa que variando esses componentes para controlar a largura do pulso também temos um efeito sobre a frequência, caso de Ra.
Isso ocorre porque o percurso da corrente de carga passa por Rb e também a corrente de descarga, o que também influi na impossibilidade de termos ciclos ativos em toda faixa de valor.
Para obter um controle melhor desse ciclo ativo, uma solução seria implementar na aplicação um modo de fazer com que a corrente de carga tenha um percurso diferente da corrente de descarga. Conseguimos isso com um diodo, conforme mostra a figura 7;

Mas ainda temos o problema de que usando um desses componentes variável, ao mudar os pulsos também temos uma influência sobre a frequência e uma limitação da faixa.
Uma forme final de solucionar o problema para termos um verdadeiro gerador PWM é a mostrada na figura 8 em que, ao mesmo tempo, controlamos a carga e descarga de modo a manter seus tempos constantes.
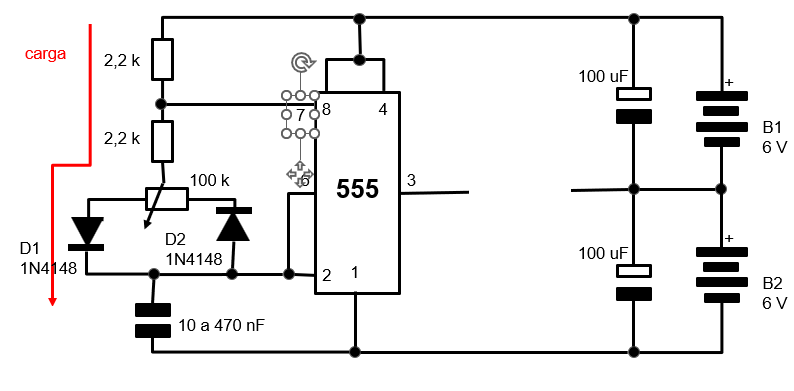

Veja que, quando corremos o cursor do potenciômetro da esquerda para a direita, ao mesmo tempo que aumenta a resistência de carga (através de D1), diminui a resistência para a descarga, através de D2 e com isso a soma dos tempos e a frequência se mantém constante. Bem próximo de um PWM ideal.
Podemos adotar soluções semelhantes com outros osciladores retangulares como o 4093 no circuito da figura 9.

E é claro, completamos tudo com a etapa de potência para acionar cargas de maior potência, mostradas na figura 10.

Conclusão
PWM é a solução ideal para o controle de potência de cargas de corrente contínua. E, o componente ideal para esse tipo de aplicação de forma simples é o circuito integrado 555;
Neste artigo mostramos como funciona tudo isso e porque no PWM não é apenas a largura do pulso que deve ser controlada, mas a frequência eve ser mantida constante para se ter estabilidade, evitar a geração de EMI e muitos outros problemas que devem ser evitados.
No nosso livro no link abaixo você terá tudo que precisa saber sobre o 555.
https://www.newtoncbraga.com.br/?view=article&catid=42&id=12523










