










Existem alguns componentes eletrônicos que tem seu funcionamento baseado no campo magnético criado por uma ou mais bobinas. Neste artigo vamos focalizar três desses componentes que, pela sua importância, devem ser bem conhecidos de todos os praticantes da eletrônica e também da mecatrônica. Os relês, transformadores e motores são componentes básicos dos projetos de mecatrônica e robótica além de poderem ser encontrados numa infinidade de equipamentos comerciais, industriais e automotivos. Estes componentes podem ter as mais diversas funções e aparências, mas o princípio de funcionamento ser sempre o mesmo.
Os três componentes que vamos analisar neste artigo têm u ponto em comum: uma ou mais bobinas de fio esmaltado enrolada em torno de um núcleo de material ferroso.
Evidentemente, a finalidade destas bobinas é criar um campo magnético quando uma corrente as percorre, mas o que vai ser feito com este campo magnético vai depender do que desejamos dos componentes, e aí está a principal diferença.
Assim, ao analisarmos os três componentes citados num único artigo, o fazemos apenas pelo seu aspecto comum que é a bobina e o campo, se bem que no fundo, eles sirvam para coisas completamente diferentes.
OS RELÊS
Um relê pode ser definido como um interruptor ou um comutador eletromecânico.
Na figura 1 temos a estrutura básica simplificada de um relê comum.

Quando fazemos circular uma corrente pela sua bobina, é criado um forte campo magnético que torna o núcleo desta bobina um eletroímã.
Este eletroimã atrai uma armadura móvel que possui conjuntos de contactos.
Com o movimento, os contactos encostam uns nos outros e um circuito externo pode ser fechado ou comutado, conforme a maneira como estes contactos estejam montados.
Quando a corrente na bobina é interrompida, o campo cessa e as armaduras, deixando de ser atraídas, voltam à sua posição normal.
Veja então que, a partir da corrente que circula na bobina (que pode ser muito fraca) podemos controlar correntes muito mais intensas ou sob tensões diferentes, pelos contactos acionados.
Na figura 2 temos os símbolos adotados para a representação de um relê.

No primeiro caso temos um relê simples em que temos dois contactos: o primeiro é o contacto fixo ou comum (C) e o outro é o móvel ou NA (normalmente aberto).
Isso significa que, quando não há corrente na bobina, os contactos estão abertos e o circuito interrompido.
Os contactos são estabelecidos quando a corrente circula pela bobina.
No segundo caso temos um relê simples com contacto NF (normalmente fechado).
Isso significa que neste relê, quando não há corrente na bobina, os contactos estão encostados um no outro e a corrente circula.
A corrente é interrompida, quando o relê é acionado, ou seja, quando passa corrente pela sua bobina.
O terceiro exemplo é um relê de contactos reversíveis em que temos dois contactos NA e NF. Este relê pode ser usado como uma chave comutadora de 2 pólos x 2 posições, ou seja, reversível (também chamada chave H).
Quando a bobina se encontra sem corrente, o contacto comum (C) encosta no NF. Quando a bobina ‚ energizada, ou seja, circula corrente, o contacto comum (C) passa a encostar no NA.
Uso:
Podemos usar um relê para controlar correntes intensas a partir de circuitos de baixa tensão e baixas correntes.
Mas além da possibilidade de fazermos isso, o relê tem ainda uma característica importante que deve ser ressaltada: o circuito da bobina é completamente isolado do circuito dos contactos.
Assim, como mostra a figura 3 podemos controlar um circuito de alta tensão (110V ou 220V) a partir de um circuito alimentado por baixa tensão de pilhas, com total segurança.

Podemos tocar em qualquer ponto do circuito de acionamento, sem o perigo de choque. O relê pode então ser usado como elemento de controle de segurança.
Especificações:
Para saber que relê devemos usar numa determinada aplicação precisamos estar atentos às suas especificações.
As especificações mais importantes dos relês são as seguintes:
a) Tensão da bobina - trata-se da tensão que precisamos aplicar entre os extremos da bobina para obter a corrente que vai atrair os contactos, acionando-os. Normalmente, é indicado um valor único, mas na pr tica o relê pode funcionar bem numa certa faixa de valores. Assim, um relê de 6V funcionar bem numa faixa de uns 5,5 a 7 volts, sem problemas.
Devemos escolher a tensão do relê de acordo com a tensão que o circuito de acionamento vai fornecer. Em alguns casos, é preciso levar em conta que o dispositivo que vai fazer o acionamento pode apresentar uma pequena queda que deve ser compensada. Por exemplo, no circuito da figura 4, o SCR "perde" 2 volts quando conduzindo a corrente, de modo que o relê só recebe 4 volts dos 6 da alimentação. Se for usado um relê de 6V ele pode ter problemas para o acionamento.

Melhor seria usar um relê de 5 V ou então alimentar o circuito com 8 ou 9 volts.
b) Corrente da bobina
Trata-se da corrente que vai circular pela bobina para o acionamento quando a tensão nominal ou tensão da bobina for estabelecida.
Os relês sensíveis eletrônicos comuns possuem correntes de acionamento bem pequenas com valores que no máximo chegam a uns 100 mA. Estas correntes normalmente diminuem quando os relês são especificados paea trabalhar com tensões maiores. Assim, é comum que um relê de 6V precise de até 100 mA quando o mesmo tipo para 12V precisa somente de 50 mA.
O valor desta corrente é importante pois ele vai determinar que tipo de circuito eletrônico pode fazer seu acionamento. Por exemplo, se tivermos um relê que precisa de 6V x 100 mA não podemos ligá-lo na saída de um circuito integrado que só fornece 6V x 10 mA, pois o acionamento será impossível. Um circuito que permita obter maior corrente, como o da figura 5 deve ser usado.

c) Resistência do enrolamento
Os relês trabalham na maioria dos casos com correntes cont¡nuas puras, de modo que, em lugar de fornecermos a tensão e a corrente, podemos em seu lugar, fornecer a tensão e a resistência do enrolamento.
Pelo valor da resistência é possível calcular a corrente.
Assim, um relê de 6V com 60 Ω de resistência de enrolamento precisa de 6/60 = 0,1 A ou 100 mA para o seu acionamento.
Basta dividir a tensão de acionamento pela resistência para obter a corrente. Da mesma forma se dividirmos a tensão pela corrente de um relê, vamos obter a resistência de seu enrolamento.
d) Tipos de contactos
Conforme mostramos, os relês podem ter contactos simples NA ou NF, ou então reversíveis, caso em que teremos relês comutadores com os mais diversos números de contactos.
Saber que tipo de contacto tem um relê é importante para a aplicação, principalmente se ela for mais do que a simples interrupção da corrente num circuito. Isso ocorre, por exemplo, se precisarmos de um relê tipo "H" ou reversível para inverter a rotação de um motor num projeto de mecatrônica.
e) Corrente máxima dos contactos
Os relês são como os interruptores e chaves: a corrente máxima que pode controlar está determinada pelo tipo e tamanho dos contactos. Uma corrente mais intensa do que a admitida pode aquecer e queimar os contactos e o controle de cargas indutivas pode causar faiscamentos que acabam por queimar os contactos.
Com os contactos queimados, o relê pode falhar, travar (grudar os contactos) e até mesmo não mais ser capaz de acionar o circuito externo, exatamente como acontece com interruptores e chaves comuns.
As correntes máximas dos relês são especificadas para cargas indutivas e cargas resistivas e tem valores diferentes, pelos motivos que explicamos.
Essas correntes são dadas em amperes. Na escolha de um relê devemos ter o cuidado para que a corrente que ele seja capaz de controlar seja sempre maior do que aquela que vai encontrar no circuito de aplicação.
Assim, uma margem de segurança garante um bom funcionamento para o relê em qualquer condição.
Também é importante observar que estas correntes são especificadas para determinadas tensões.
f) Tensão de contactos
Os contactos dos relês, pela distância em que se mantém quando abertos, têm também um limite para a tensão que devem controlar. Não devemos nunca usar um relê para controlar um circuito de tensão maior do que a m xima especificada para seus contactos.
Normalmente as tensäes são dadas em valores contínuos ou alternados (Vdc ou Vac) e podem ser tipicamente de 250V para as aplicações comuns.
Ao usar um relê na rede de energia lembre que a tensão máxima encontrada na rede de 110V não é 110V mas sim o valor de pico que pode chegar aos 150V.
Tipos:
Na figura 6 temos alguns tipos comuns de relês usados em montagens eletrônicas.

O principal cuidado que o montador deve ter ao usar estes relês é com a identificação dos terminais. Isso pode ser feito facilmente com o multímetro, conforme mostra a figura 7.

A resistência entre alguns Ω até 100 ou 200 Ω tipicamente indicará que estamos com o multímetro ligado nos terminais da bobina.
A resistência nula mostrará que estamos entre os terminais C e NF, e a infinita entre C e NA.
Para saber qual é o C, energize a bobina do relê (aplique a tensão que ele exige) e faça a prova dos contactos: a inversão permite, por eliminação, identificar o terminal C.
TRANSFORMADORES
Os transformador são componentes formados por 2 ou mais bobinas enroladas num núcleo de material ferroso comum. Na figura 8 temos o símbolo e o aspecto deste tipo de componente.

O transformador mais comum é o de alimentação ou força, usado em fontes e que funciona da seguinte maneira:
No enrolamento primário é aplicada a tensão da rede de energia que pode ser de 110V ou 220V conforme o caso.
Esta tensão estabelece uma corrente pelo enrolamento que cria um campo magnético que tem as linhas de força concentradas pelo núcleo de material ferroso.
As linhas de força se expandem e se contraem na mesma frequência da corrente alternada de modo que, constantemente elas cortam as espiras do enrolamento secundário.
O resultado disso é que neste enrolamento é induzida uma tensão elétrica que se torna disponível nas suas extremidades.
O importante do transformador é que esta tensão de secundário tem um valor diferente da tensão de primário e seu valor depende da relação entre as voltas de fio (espiras) dos enrolamentos.
Assim, se no enrolamento primário de 1 000 voltas aplicarmos 110 volts, no secundário de 100 voltas teremos apenas 11 volts.
Podemos então alterar uma tensão alternada usando um transformador, aumentando ou diminuindo seu valor conforme o número de voltas dos enrolamentos.
A espessura do fio usado vai determinar a corrente máxima que podemos obter na saída do transformador.
O importante, além disso, é que os enrolamentos estão isolados um do outro, o que quer dizer que a energia passa apenas por indução. Assim, se o primário está ligado à rede de energia, podemos tocar no secundário, sem o perigo de choques.
O transformador, al‚m de produzir a tensão que um circuito precisa para funcionar também serve como elemento de segurança isolando os circuitos da rede de energia.
Tipos:
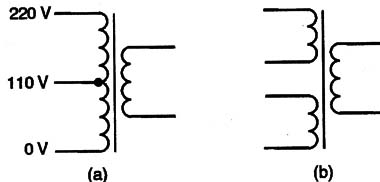
Na figura 9 temos os símbolos de alguns tipos comuns de transformadores.

O primeiro tem um enrolamento duplo, ou seja, podemos selecionar o número de voltas do primário, conforme a tensão da rede de energia em que ele vai ser ligado.
O segundo tem um secundário dotado de uma tomada central a partir da qual podemos ter duas tensões com fases opostas.
Este tipo de transformador facilita o processo de retificação pois são usados apenas dois diodos na retificação de onda completa.
O terceiro tipo é um transformador com dois enrolamentos secundários: um de baixa tensão e outro de alta tensão. Este tipo de transformador é encontrado em aparelhos valvulados.
Um tipo de transformador que está se tornando bastante importante na atualidade é o que faz uso de núcleo toroidal e que é mostrado na figura 10.

Em lugar das chapas em forma de E, I ou F, este tipo de transformador usa um núcleo em anel dde pó de ferro ou ferrite.
Além de ser mais leve (o tamanho depende da potência, ou seja, do produto da tensão pela corrente de secundário) ele é mais eficiente.
O princípio de funcionamento, entretanto, é o mesmo: o campo produzido pelo primário, induz a tensão do enrolamento secundário.
Especificações:
Como qualquer outro componente, o transformador deve ser escolhido de acordo com as suas especificações.
Para os transformadores comuns, usados em fontes de alimentação, as especificações mais importantes são:
a) tensão de primário
É a tensão de entrada do transformador, ou seja, a tensão que deve ser aplicada ao enrolamento primário para se obter as tensões e correntes desejadas no secundário. Para os tipos comuns ela pode ser 110V, 220V ou em alguns casos as duas.
Para os transformadores de duas tensões, conforme mostra a figura 11, podemos ter um primário com um enrolamento dotado de derivação ou ainda dois enrolamentos primários.
b) tensão de secundário
É a tensão de saída, ou seja, a tensão que obtemos no enrolamento secundário quando a tensão nominal é aplicada no primário.
Ela pode ser maior ou menor que a tensão do primário, caso em que podemos ter transformadores elevadores ou abaixadores de tensão.
Quando o transformador possui um enrolamento secund rio dotado de derivação, então ele apresenta duas tensões, na realidade.
Assim, para os exemplos da figura 12, temos transformadores de 6+6V e de 12+12V. Observe então que entre os extremos do secundário do primeiro temos 12V e no segundo temos 24V.
É interessante observar que a tensão do secundário de um transformador não é obrigatoriamente a tensão que uma fonte fornece.
A tensão do secundário do transformador ao passar por processos de retificação, filtragem e regulagem é alterada podem então aparecer na saída com valores maiores ou menores.
Em suma, um transformador de 6V não é encontrado obrigatoriamente numa fonte de 6V.
c) Corrente de secundário
É a corrente máxima que o enrolamento secundário pode fornecer. Ela deve ser sempre maior ou igual a exigida pelo circuito que vai ser alimentado.
Assim, podemos usar um transformador de 6V x 500 mA para alimentar uma lâmpada de 6V x 200 mA mas não podemos usar um transformador de 6V x 200 mA para alimentar uma lâmpada de 6V x 500 mA.
d) Potência
Na verdade, esta característica não é indicada, mas é importante e pode ser calculada facilmente multiplicando-se a corrente de secundário pela tensão de secundário.
Com isso, um transformador de 12V x 500 mA tem, em princípio uma potência de 6 watts.
Dizemos, em princípio, pois existem perdas, o que quer dizer que na verdade, o transformador exige um pouco mais da rede de energia, ficando a diferença por conta do calor gerado no componente e das próprias perdas que ocorrem no seu funcionamento pela dispersão do campo magnético.
Usando:
Para usar o transformador, observe em primeiro lugar, se a tensão do primário ‚ igual à da rede em que você pretende ligá-lo.
Depois, verifique se a tensão e a corrente de secundário são compatíveis com a aplicação. A corrente pode ser maior ou igual à exigida, mas com a tensão devemos tomar cuidado.
Somente nos circuitos que usam reguladores integrados ou mesmo transistorizados, eventualmente podemos usar um transformador de maior tensão sem problemas, desde que esteja dentro dos limites que o dispositivo usado na regulagem admita.
Por exemplo, um regulador 7806 para sa¡da de 6V x 1A pode operar com tensões de entrada de 8 a 25V. Assim, podemos tanto usar tanto transformadores de 9 V, 12V como 15 V de secundário, sem problemas!
MOTORES
A finalidade dos motores elétricos é converter energia el‚trica em energia mecânica, ou seja, movimentar alguma coisa.
Encontramos muitos tipos motores de pequeno porte em equipamentos eletrônicos com as mais diversas formas e finalidades. Nos gravadores eles movimentam as fitas, nos CD-players eles movimentar os CDs, nos comutadores movimentam os disquetes e o disco rígido (Winchester), nos relógios movimentam os ponteiros e assim por diante.
O tipo básico de motor de corrente contínua é mostrado na figura 12.
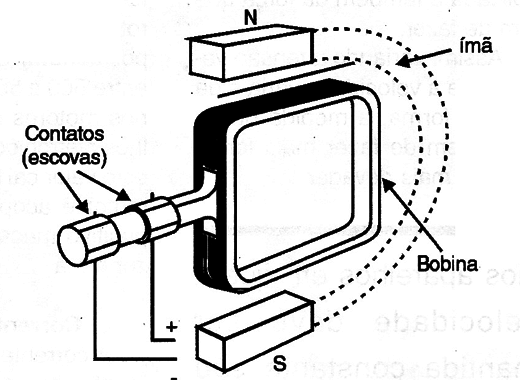
Uma bobina ‚ percorrida por uma corrente, criando um campo magnético que está em oposição com o campo magnético de pequenos imãs.
O resultado é que surge uma força de repulsão que empurra a bobina de tal forma que, montada num eixo, ela pode girar no sentido de encontrar um ponto de equilíbrio.
Para encontrar este ponto de equilíbrio a bobina deveria dar meia volta, no entanto, ao fazer isso, os contactos da bobina com o circuito externo invertem pelo seu próprio movimento. Isso significa que a corrente, invertendo de sentido, faz com que o campo volte a situação de oposição inicial e a bobina tenha de dar mais meia volta para chegar ao equilíbrio.
Mais meia volta e novamente temos a comutação da corrente. Isso significa que, por mais que gire, nunca a posição de equilíbrio é encontrada. A bobina gira então constantemente enquanto houver alimentação.
Variações desta configuração básica podem existir, por exemplo, nos chamados motores de passo em que o controle da posição da parte móvel (rotor) pode ser fixada com muita precisão por diversas bobinas acionadas por circuitos lógicos, conforme mostra a figura 13.
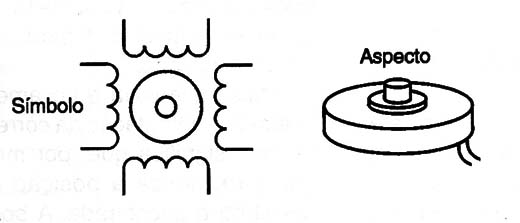
Motores deste tipo podem girar exatamente de um ângulo desejado de modo a levar a bobina de um cabeçote de um driver de disquete a ler a trilha e o setor em que está a informação desejada.
É um motor deste tipo que pode controlar a posição do braço de um robô de modo a levá-lo na posição desejada.
Tipos:
O tipo mais comum de motor é o motor de corrente contínua CC ou DC usado para gerar força mecânica (sem muita precisão) na movimentação de dispositivos.
Estes motores são os mais usados em projetos de robótica e mecatronica simples, na propulsão e também podem ser encontrados em gravadores cassete, CD-players, brinquedos e muitos outros pequenos aparelhos eletrônicos.
Estes motores também são denominados "de imã permanente" pela presença de pequenos imãs em seu interior.
Normalmente, estes motores são suficientemente pequenos para poderem ser alimentados por pilhas ou com baixas tensões, se bem que isso signifique que também não possuam muita força.
Especificações:
Como qualquer dispositivo eletrônico os pequenos motores também possuem especificações. Ocorre, entretanto, que as especificações dos motores não são muito rígidas.
Na verdade, a velocidade com que eles giram não é constante, dependendo tanto da tensão aplicada como também da força que têm de fazer.
Assim, variando a tensão vemos que a velocidade varia e da mesma forma, à medida que o motor tem de fazer mais força, ele gira mais devagar.
Nos aparelhos em que a velocidade deve ser mantida constante são empregados circuitos reguladores especiais.
a) Tensão de alimentação
Normalmente é dada uma certa tensão para o funcionamento do motor, por exemplo 3 volts. No entanto, na prática, um motor com esta tensão funcionará bem numa faixa relativamente ampla de tensões, por exemplo, entre 1,5 e 5 V, desconsiderando-se que a força vai variar. O que não se pode é alimentar o mesmo motor com uma tensão muito maior que a especificada, pois ele pode queimar.
Assim, muitos fabricantes, em lugar da tensão fixa, indicam uma faixa de tensões em que um determinado motor pode funcionar.
São dadas então indicações sobre a velocidade do motor em função da tensão.
b) velocidade
A rotação depende da tensão e da carga, ou seja, da fora mecânica que o motor tem de fazer. Assim, a especificação melhor ‚ aquela em que se dá a rotação com determinada tensão, quando o motor não faz força, ou seja "em aberto".
Esta rotação é dada em rpm (rotações por minuto) e pode ter valores entre 500 e 5000 para os pequenos motores usados em aparelhos eletrônicos. Evidentemente, este valor cai bastante quando o motor é acoplado a algum dispositivo mecânico, tendo de fazer força.
c) Corrente
A corrente, juntamente com a tensão, numa determinada faixa de velocidade e de forças determinam a potência do motor.
Lembrando que 1 HP corresponde a 736 watts, as potências dos pequenos motores serão medidas em milésimos de cavalos ou HP.
Assim, um motor de 6V que exige uma corrente de 100 mA à plena carga estará trabalhando com uma potência de 0,6 watt ou menos de 1 milésimo de HP.
A corrente e consequentemente a potência do motor estão ligados ao tamanho físico desse motor e também a espessura do fio usado na bobina.
De modo a se obter maior corrente de funcionamento e assim maior potência os adeptos de autoramas costumas enrolar motores com fios grossos. Menor resistência significa corrente muito maior e potência muito maior para os modelos.
