Um efeito de luz muito importante para robôs, automatismos e outros dispositivos mecatrônicos é o conjunto de LED seqüenciais. Um conjunto de LEDs dispostos em linha, círculo ou outro formato corre em uma velocidade determinada pela aplicação, indicando alguma função importante ou simplesmente chamando a atenção para a sua presença. Veja neste artigo como implementar esse efeito no seu projeto, montando um sistema sequencial de 10 LEDs ou mais com controle e modulação externa.
Os efeitos luminosos são fundamentais nos robôs e outros projetos mecatrônicos que devem chamar a atenção das pessoas. Luzes piscantes, flashes estroboscópicos, lâmpadas fluorescente alimentadas por inversores e até raios laser são alguns exemplos.
No entanto, um efeito tradicional que vemos na maioria dos robôs e projetos desse tipo, muito usado em robôs de filmes de ficção científica, é o sistema seqüencial de LEDs. Nele, um conjunto ou mais de LEDs acende de modo que as luzes correm de um lado para outro, às vezes até acompanhando a fala do robô ou a execução de alguma tarefa importante.
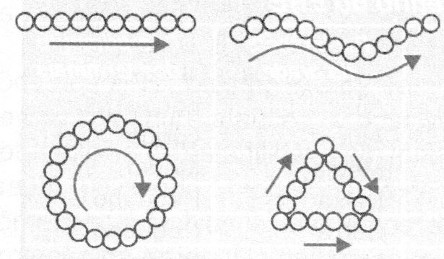
Conforme mostra a figura 1, os LEDs podem ser dispostos em linha, círculo ou formando as mais diversas figuras.
O projeto que descrevemos neste artigo, e que pode ser usado com as mais diversas aplicações, alimenta um conjunto de 10 ou 20 LEDs e pode ser programado para ter diversos efeitos e até mesmo ser acionado por sensores.
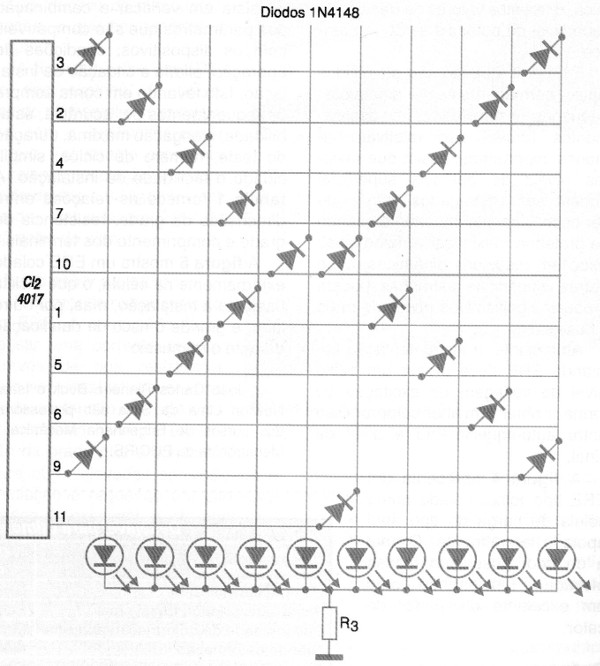
Usando uma matriz de diodos podemos fazer com que os LEDs tenham um efeito de corrimento vai e vem e até mesmo abre-e-fecha, conforme mostra a figura 2.
O circuito, que se baseia em tecnologia CMOS de baixo custo, pode ser alimentado com tensões de 5 a 12 V.
Como Funciona
Na figura 3 temos um diagrama de blocos que representa as funções empregadas no nosso circuito.
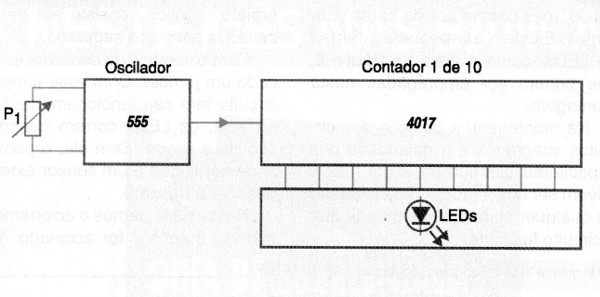
O primeiro bloco consiste num oscilador cuja freqüência determina a velocidade de corrimento dos LEDs. Essa velocidade depende de C1 e pode ser ajustada no trimpot P1 que é o único ajuste do circuito.
Este oscilador pode ser habilitado ou desabilitado por um sensor externo, o que é interessante nas aplicações robóticas, pois podemos usar o circuito para indicar funções.
O sinal deste oscilador é aplicado a um contador Johnson com base num circuito integrado 4017. O circuito integrado 4017 é do tipo “uma saída de dez”, ou seja, a cada pulso aplicado na sua entrada, uma saída vai ao nível alto, ao mesmo tempo em que a saída anterior, que estava no nível alto, passa para o baixo, conforme mostra a figura 4.
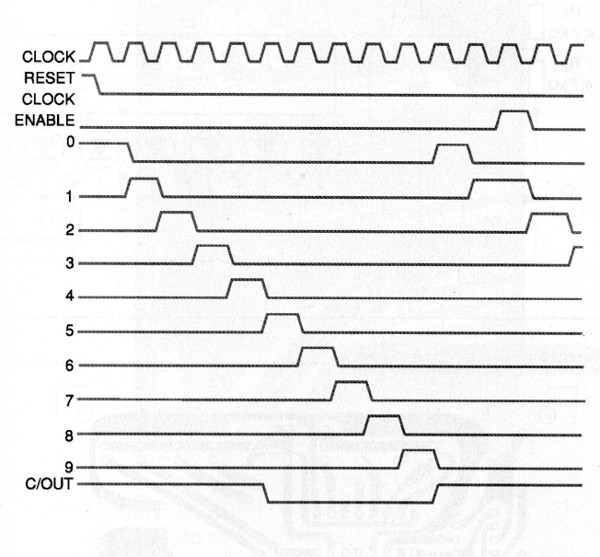
Se ligarmos LEDs nessas saídas, a cada pulso aplicado pelo oscilador, um LED acende e o anterior apaga. Quando o último LED apaga, o circuito resseta e com isso o primeiro LED acende, recomeçando o corrimento.
Como cada saída do 4017 pode alimentar com relativa facilidade até dois LEDs e existem 10 saídas, o circuito pode acionar seqüências com 10 ou 20 LEDs.
Também existe a possibilidade de acionarmos menos LEDs, conforme mostra a figura 5.
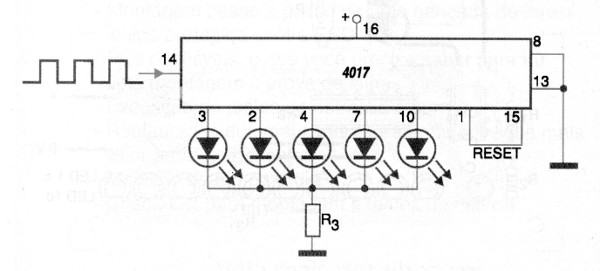
Para isso, basta ligar a saída posterior ao último LED da seqüência escolhida ao RESET do 4017. Por exemplo, se vamos acionar uma seqüência de 5 LEDs, como ilustrado na figura, ligamos a sexta saída ao RESET.
Em série com os LEDs é preciso ligar um resistor para limitar a corrente, pois sem ele, o circuito integrado e os próprios LEDs podem ser sobrecarregados.
Montagem
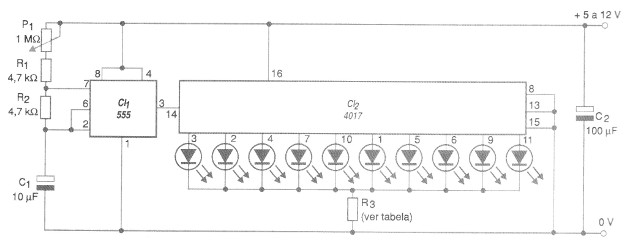
Na figura 6 temos o diagrama completo da versão com 10 LEDs.
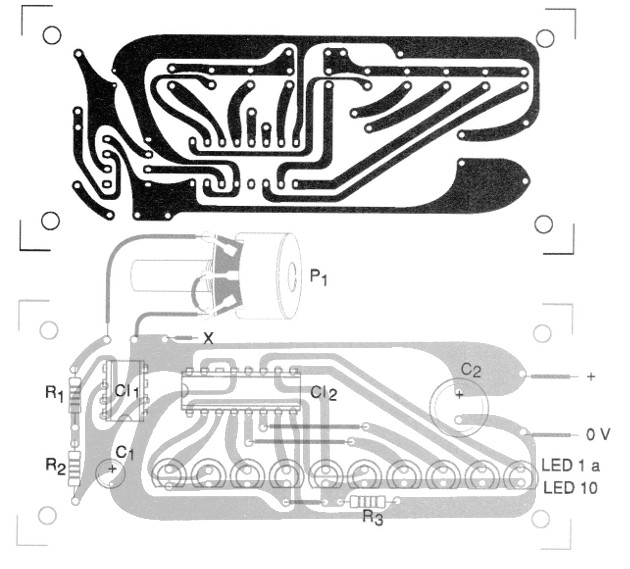
Sua montagem pode ser feita numa placa de circuito impresso com a disposição de componentes mostrada na figura 7.
Os LEDs são comuns de formatos iguais, mas podem ser de cores diferentes. Existem até pequenas barras de LEDs, como a mostrada na figura 8 que podem ser usadas nesta montagem.
Na montagem, a posição dos circuitos integrados, a polaridade dos capacitores eletrolíticos e dos LEDs devem ser observadas. Uma inversão de qualquer componente impede que o circuito funcione.
Uma possibilidade interessante para um projeto robótico, consiste em montar os LEDs em placa separada.
Para o controle do oscilador é colocado um jumper. Com esse jumper o circuito tem seu funcionamento livre, ou seja, os LEDs correm quando o circuito é ligado. Sem o jumper, o ponto X pode ser ligado a um sensor externo, conforme mostra a figura 9.
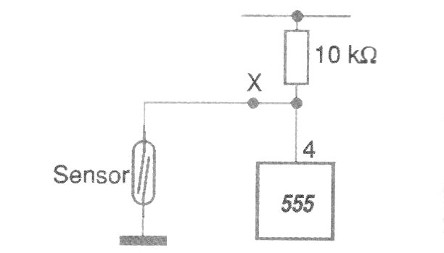
Nesse caso, temos o acionamento quando o sensor for acionado. Veja que a entrada X pode ser controlada pelo nível lógico de circuitos CMOS e até mesmo por uma saída da porta paralela de um PC se a alimentação do circuito for feita com 5 V.
Outra possibilidade interessante para este projeto consiste em se fazer a modulação do corrimento dos LEDs. Isso é conseguido aplicando-se um sinal de áudio devidamente retificado e filtrado ao terminal 5 do circuito integrado 555, conforme mostra a figura 10.
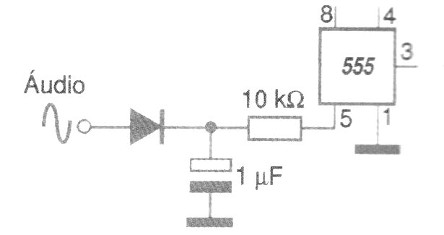
Os LEDs vão correr em uma velocidade que depende do som aplicado. Para um robô com voz sintetizada, teremos ume feito muito interessante dos LEDs de uma “boca” ou “olhos” correndo conforme a fala.
Para uma programação de efeito deve ser usada uma matriz de diodos, conforme mostrado na figura 2.
A disposição dos diodos vai determinar a seqüência de acendimento e quais LEDs serão ativados quando cada saída for ao nível alto. Podemos dizer que a matriz funciona como uma memória programável de efeito.
O resistor R3 depende da tensão de alimentação, conforme a seguinte tabela:
| Alimentação | R3 |
| 5 V | 100 ohms |
| 6 V | 120 ohms |
| 9 V | 470 ohms |
| 12 V | 1 k ohms |
Prova e Uso
Para provar seu circuito basta alimentá-lo com bateria ou fonte de 5 a 12 V. Se o jumper estiver presente no projeto, os LEDs devem correr imediatamente. Ajuste a velocidade no trimpot.
Se desejar uma velocidade muito baixa, aumente o valor do capacitor de temporização ligado aos pinos 2 e 7 do 555.
Comprovado o funcionamento é só fazer a instalação definitiva do seu sistema sequencial.
CI-1 – 555 – circuito integrado, timer
CI-2 – 4017 – circuito integrado CMOS
LED1 a LED10 – LEDs comuns – ver texto
Resistores: (1/8 W, 5%)
R1, R2 – 4,7 k ohms – amarelo, violeta, vermelho
R3 – ver tabela
P1 – 1 M ohms – trimpot
Capacitores:
C1 – 10 uF x 16 V – eletrolítico
C2 – 100 uF x 16 V – eletrolítico
Diversos:
Placa de circuito impresso, soquetes para os CIs (opcional), fios, solda, etc.