










Este tema já foi abordado em outros artigos deste site. Alguns circuitos são semelhantes aos usados em projetos práticos nesta seção. No entanto, vale como referência a leitura deste artigo de 2001.
Um dos problemas para a realização de projetos práticos que envolvam automatismos mecânicos acionados por meio de circuitos eletrônicos, como por exemplo, a partir de computadores e circuitos digitais de controle é a obtenção de componentes mecânicos.
A Mecatrônica, que une as tecnologias da Eletrônica e da Mecânica está se difundindo cada vez mais e muitas escolas já possuem cursos regulares desta disciplina. No entanto, elas enfrentam muitas dificuldades justamente pela impossibilidade de implementação de projetos didáticos simples, acessíveis e baratos que possam ser realizados no nível exigido pelos cursos. Uma solução interessante que apresentamos neste artigo consiste no uso de caixas de redução.
O maior problema para os montadores de automatismos mecânicos como braços mecânicos, robôs, pequenos veículos controlados à distância, etc., está na obtenção das partes mecânicas.
Muitos, desmontando brinquedos e eletrodomésticos fora de uso e mesmo equipamentos de uso especializado que usam elementos mecânicos acabam por conseguir muitos componentes importantes como motores, engrenagens, polias, etc. e a partir deles construir sistemas de redução, movimentação de alavancas, braços e em alguns casos até montar servomecanismos.
Obs. Na época em que o artigo foi escrito não estavam disponíveis diversos tipos de caixas de redução de origem chinesa e baixo custo como hoje.
No entanto, trata-se de um verdadeiro trabalho de "garimpagem" que nem sempre leva as soluções desejadas, além de dar muito trabalho. Com a disponibilidade de computadores em praticamente qualquer laboratório de desenvolvimento, a possibilidade de se controlar dispositivos mecânicos a partir de programas automatizadores, de um teclado ou mesmo de um joystick, torna-se cada vez mais tentadora, e as escolas que ensinam Mecatrônica sabem disso e até mesmos os profissionais que tentam implementar seus próprios projetos nesta área.
No entanto, esbarra-se ainda na parte mecânica que pode significar a diferença entre o êxito e o fracasso de qualquer projeto. Mas, o problema tem algumas soluções simples que podem facilitar bastante o trabalho dos projetistas.
A disponibilidade no mercado de uma caixa de redução com características padronizadas e que funciona com tensões que são facilmente obtidas a partir de circuitos eletrônicos comuns pode ajudar bastante os leitores interessados.
CAIXA DE REDUÇÃO
Na época em que foi escrito este artigo (2001) estava disponível uma caixa de redução que podia servir para a realização de uma infinidade de projetos que envolvam o controle de dispositivos mecânicos a partir de sinais elétricos.

Esta caixa de redução, conforme mostra a figura 1, consta de um motor de corrente contínua de 6 volts que aciona um conjunto de engrenagens metálicas, obtendo-se assim uma redução de velocidade numa proporção que pode ser considerada ideal para aplicações em Mecatrônica, Robótica e automatismos mecânicos diversos.
Como os motores de corrente contínua possuem uma velocidade que depende de sua carga, não é possível definir exatamente a velocidade da redução, mas ela estará entre 0,5 e 1 giro por segundo, tipicamente, dependendo de quanta força você desejar que ela aplique num mecanismo.
Para um motor pequeno, esta taxa de redução permite uma multiplicação considerável da força, o que quer dizer que no eixo de redução obtém-se um torque considerável.
De fato, enrolando-se diretamente um fio neste eixo, é possível deslocar um peso considerável, conforme mostra a figura 2.

A vantagem principal deste sistema está na facilidade que se tem de acoplar o eixo a qualquer dispositivo que se deseje movimentar e na possibilidade de se controlar o motor com tensões e correntes relativamente baixas.
Também observamos que é possível inverter o sentido de rotação do sistema, bastando para isso que se inverta a circulação da corrente no motor.
Para os projetistas de Mecatrônica, Robótica e automatismos mecânicos existe uma outra vantagem importante no uso destas caixas: a possibilidade de se conseguir diversas unidades com características semelhantes, garantindo assim uniformidade na ação do projeto.
Certamente isso não vai ocorrer se peças isoladas forem aproveitadas de sucatas ou montadas a partir de componentes isolados aproveitados da mesma forma.
Também é importante observar que o próprio motor original pode ser facilmente trocado, caso o projetista deseje características diferentes para seu automatismo.
COMO USAR
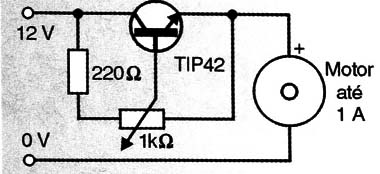
A maneira mais simples de se controlar o motor a partir de sinais de pequena intensidade faz uso de um transistor NPN ou PNP de média potência de uso geral, mostrado na figura 3.
Para se alterar a velocidade de rotação numa faixa bastante ampla podemos usar um controle PWM com base em circuitos integrados simples.
Assim, o circuito da figura 4, altera o ciclo ativo do sinal retangular aplicado no motor de modo a modificar sua velocidade com um mínimo de perda de torque nas baixas rotações.

Neste circuito também podemos usar um transistor de efeito de campo de potência (Power FET) que é capaz de controlar vários ampères de corrente com grande facilidade.
Esta característica é importante, pois diferentemente dos reostatos comuns não existe uma “faixa morta” em que o motor é alimentado, mas não “parte”, saindo depois da imobilidade já com boa velocidade. Este problema, muito notado em ferrovias em miniatura, autoramas e robôs móveis, não ocorre com este tipo de controle.
Uma aplicação interessante consiste na inversão da polaridade e portanto do sentido de rotação por meio de uma ponte de transistores ou ponte H como é chamada.
Este circuito, mostrado na figura 5, funciona da seguinte forma: quando o nível do sinal de controle é alto, conduzem os transistores Q1 e Q3 com a corrente passando num sentido pelo motor. Quando o nível do sinal de controle é baixo, conduzem os transistores Q2 e Q4 com a circulação da corrente pelo motor no sentido inverso. A combinação deste circuito com o anterior permite que se tenha um domínio completo sobre o sentido de rotação e a velocidade do motor.

Observe que estes circuitos permitem o controle digital da caixa de redução o que pode ser interessante nas aplicações que envolvam o uso de microcontroladores como shields.
Para se usar o computador (PC) ou um microcontrolador diretamente no controle de uma caixa de redução (ou mais) podemos obter os sinais de sua porta paralela o saídas I/O.
Para isso, basta conhecer os sinais obtidos nesta porta que são discutidos com maiores detalhes no artigo: Os Segredos da Porta Paralela neste site e em Shields.
Em cada saída D0 a D7 temos sinais de controle que podem drenar correntes máximas de 24 mA e fornecer correntes máximas de 2,4 mA a uma carga externa. Isso significa que, para maior segurança sempre deveremos fazer os acionamentos com a porta correspondente no nível baixo ou então usar buffers apropriados.
O acionamento direto por meio de transistores é mostrado na figura 6. Neste circuito o uso de transistores PNP faz com que o motor seja acionado quan- do o nível lógico na saída seja 0.
")
A fonte de alimentação do motor (ou motores) deve ser separada, mas o ponto de terra deve ser comum com a fonte do computador.
Para que o acionamento do motor ocorra com o nível lógico 1 podemos ter um inversor que é mostrado na figura 7. Para usar buffers devemos lembrar que as saídas do PC casam-se com a tecnologia TTL LS e HC MOS.

Finalmente, para maior segurança nos projetos, pode ser usada uma interface com isoladores ópticos, caso em que se garante que qualquer problema elétrico que ocorra não vá refletir no computador ou microcontrolador. Um circuito deste tipo é mostrado na figura 8.

É importante observar que os buffers internos do computador que fornecem sinais a sua saída normalmente fazem parte de chips com outras funções internas como, por exemplo, o controle dos drivers. Isso significa que um dano acidental nos circuitos das portas pode ter consequências graves para o PC.
Desta forma, ao implementar qualquer circuito de controle com seu computador olhe com especial cuidado para as conexões da DB25.
Qualquer curto nesta parte do circuito pode ser fatal para a integridade de seu computador. A ida ao nível lógico baixo ou alto sem encontrar uma limitação de corrente significa uma sobrecarga que os circuitos do computador não suportam.
Lembre-se também que os circuitos das portas são tri-state permanecendo num estado indeterminado (nem 0 nem 1) na ausência de sinal de habilitação.
Com relação aos programas de controle eles podem ser facilmente elaborados em diversas linguagens.
Outras caixas de redução:
Muitos brinquedos que se movimentam não têm suas rodas propulsoras diretamente acopladas aos motores, pois eles são de alta rotação e neste caso deseja-se baixa rotação e maior torque. Assim, é comum que nestes brinquedos já encontremos os motores acoplados a pequenas caixas de redução que tanto podem ter engrenagens plásticas como de metal. Estes motores, com suas caixas de redução, podem ser usados em diversos projetos de Mecatrônica.
