Osciladores senoidais de baixa frequência de ótima qualidade podem ser implementados com amplificadores operacionai. O ganho elevado, impedância de entrada alta e outras características possibilitam a obtenção de sinais senoidais com baixíssimo grau de distorção e em frequências que atendem a maioria das aplicações comuns. Neste artigo, com tradução e adaptação de literatura da Texas Instruments, damos algumas informações importantes para o projeto de tais osciladores. Nesta atualização de 2012, mostraos técnicas que podem ainda hoje ser utilizadas de modo eficiente. Nossa indicação é a consulta de diversos artigos no site que complementam agora as informações dadas, tais como circuitos práticos e cálculois.
Um oscilador nada mais é do que um amplificador com um circuito de realimentação positiva.
na figura 1 temos a representação básica de um oscilador em que uma rede de feedback passiva é usada.

A equação que define a operação deste oscilador é dada na própria figura.
As oscilações do circuito ocorrem devido a um estado instável que existe no circuito porque a função de transferência (1 + Aß) = 0 nunca pode ser satisfeita já que A/0 é um estado indefinido.
Assim, o ponto chave para se projetar um oscilador é assegurar que ß = -1, o que é denominado tecnicamente de Critério de Barkhausen, ou ainda usando um valor complexo equivalente: Aß =1 ß -180 graus.
O -180 graus consiste numa rotação de fase necessária aos circuitos de realimentação negativa, enquanto que usamos 0 grau para uma realimentação positiva.
A tensão num sistema de realimentação negativa tende a uma tensão infinita quando Aß = -1.
Quando a tensão de saída se aproximada da tensão de alimentação, os elementos ativos nos amplificadores mudam de ganho, fazendo com que o valor de A mude e assim também muda o valor da expressão que passa a ser Aß diferente de -1.
Com isso a subida da tensão tendendo a infinito diminui e até é paralisada, ocorrendo uma de três coisas.
Em primeiro lugar a não linearidade na saturação ou cutoff pode fazer com que o sistema sature e corte. O sistema se torna estável e trava.
Em segundo lugar a carga inicial pode fazer com que o sistema também sature e fique estável nesta situação por um bom tempo antes de travar com a tensão oposta da linha de alimentação.
A alternativa dois produz sinais com grande distorção, normalmente sinais quase retangulares.
Esta condição é usada nos osciladores de relaxação.
No terceiro caso, o sistema permanece linear e tende ao valor oposto da linha de alimentação.
Este caso possibilita a geração de sinais senoidais.
Os circuitos que vão ser analisados a seguir foram desenvolvidos com base nos amplificadores operacionais da Texas Instruments TLV247X.
Os resistores foram de 5% e os capacitores com 20% de tolerância.
Evidentemente, as tolerâncias são responsáveis pelas diferenças entre os valores ideais e os valores medidos em cada circuito.
Deslocamento de Fase em osciladores
O deslocamento de fase de 180 graus necessária à realimentação pode ser introduzido por componentes ativos ou passivos num oscilador.
Nos osciladores bem projetados dá-se preferência aos componentes passivos já que eles estão livres de desvios de características.
Os componentes ativos têm suas características alteradas pela temperatura as quais podem ser compensadas justamente pelos componentes passivos.
Os amplificadores são selecionados de modo que eles não contribuam com pouco ou nenhum deslocamento de fase na frequência de oscilação.
Um circuito RL ou RC contribuí com até 90 graus de deslocamento de fase por pólo, e como 180 graus são necessários, pelo menos dois pólos devem ser usados.
No entanto, na prática os circuitos RL não são muito convenientes neste tipo de projeto, pois os indutores são caros, grandes e não ideais.
Osciladores LC são muito mais apropriados para projetos de alta frequência, bem acima da faixa alcançada pelos amplificadores operacionais comuns.
O uso mais comum é de redes RC em lugar de indutores.
A rotação de fase determina a frequência de oscilação, já que o circuito vai oscilador justamente na frequência que corresponde ao deslocamento de fase.
A taxa de mudança de fase com a frequência dß/dt determina a estabilidade de frequência.
Quando seções RC bufferizadas são cascateadas o deslocamento de fase é multiplicado pelo número de seções conforme mostra a figura 2.

É importante lembrar que um buffer com amplificador operacional apresenta alta impedância de entrada e baixa impedância de saída.
Apresar de duas seções RC cascateadas apresentarem um deslocamento de fase de 180 graus, o dß/dt na frequência do oscilador é baixo, o que significa que um oscilador elaborado desta forma tem pequena estabilidade de frequência.
Três filtros RC ligados em cascata têm um dß/dt maior e o oscilador resultante tem uma estabilidade de frequência melhor.
Quatro seções é o maior número usado já que os amplificadores operacionais têm a configuração máxima de quatro unidades por invólucro.
Como cada seção é usada para proporcionar uma defasagem de 45 graus em uma configuração de quatro operacionais têm-se a vantagem adicional de se poder obter sinais em quadratura, ou seja, seno e cosseno.
Os ressonadores cerâmicos ou cristais possibilitam a obtenção dos mais estáveis dos osciladores já que eles possuem um d(/dt extremamente alto resultante de suas características não lineares.
No entanto, a aplicação com ressonadores cerâmicos está restrita a aplicações de altas frequências, dado seu tamanho, peso e custo.
No caso do cristal a aplicação está limitada pelo fato dos amplificadores operacionais possuírem uma faixa passante baixa.
Ganho nos Osciladores
O ganho de um oscilador deve ser igual ou maior que 1 com o sinal defasado de 180 graus, na freqüência de oscilação.
O circuito se torna estável quando o ganho passa de 1.
Quando isso ocorre a não linearidade do dispositivo ativo reduz o ganho para 1.
A não linearidade acontece quando o amplificador tem seu sinal se aproximando das tensões de alimentação, porque o corte na saturação reduz o ganho do dispositivo ativo (transistor).
O paradoxo é que no projeto para o pior caso exige-se que o ganho nominal passe de um para tornar viável o projeto, mas o excesso de ganho causa maior distorção do sinal de saída.
Quando o ganho é muito baixo, as oscilações param, e quando o ganho é muito alto o sinal distorce se aproximando mais de um sinal retangular do que senoidal.
Isso significa que a distorção é justamente causada por excesso de ganho o que significa que o ganho deve ser ajustado com cuidado em osciladores com baixa distorção.
Os osciladores por deslocamento de fase possuem alguma distorção, mas ela pode ser reduzida partindo-se do princípio que as redes RC atuam como filtros de distorção.
Os osciladores bufferizados também possuem baixa distorção porque o ganho é controlado e distribuído entre os buffers.
Algumas configurações de baixa distorção, como por exemplo os osciladores tipo Wien Bridge precisam de circuitos auxiliares para ajustar o ganho.
Uma forma de se fazer isso é com o uso de componentes não lineares colocados no circuito de realimentação.
Estes componentes atuam como AGCs (Controle Automático de Ganho).
Oscilador por Ponte de Wien
Na figura 3 temos um circuito oscilador por Ponte de Wien (Wien Bridge Oscillator).

A freqüência do sinal gerado é calculada pela seguinte equação:

Quando ß = 2ßfc = 1/RC a realimentação está em fase (feedback positivo) e o ganho é 1/3, o que significa que o circuito requer um amplificador com ganho 3.
Quando Rf = 2RC o ganho do amplificador é 3 e a oscilação ocorre numa frequência f = 2ßRC.
O circuito mostrado na figura 3 oscila numa frequência de 1,65 kHz tanto quanto 1,59 kHz com os componentes mostrados.
No entanto a distorção é razoável.
A figura 4 mostra um circuito Ponte de Wien com realimentação não linear.

A resistência da lâmpada RL é selecionada para ter um valor nominal equivalente a metade da resistência de feedback Rf.
Com isso a lâmpada atua como um AGC, dada sua característica não linear de operação, mantendo a tensão de saída com pequenas variações.
Alguns circuitos utilizam um diodo em lugar da lâmpada, como limitador.
Os diodos reduzem a distorção fornecendo uma limitação suave para a tensão de saída.
Um AGC deve ser usado quando nenhuma dessas técnicas permite um controle automático de ganho.
Na figura 5 temos um oscilador típico de Ponte de Wien com AGC.

A forma de onda negativa é amostrada por D1 e armazenada em C1.
R1 e R2 devem ser escolhido para centralizar a polarização de Q1 de tal forma que (RG + Rqq1) = Rf/2 na tensão desejada de saída.
Quando a tensão de saída se desloca para um valor mais alto, Q1 aumenta sua resistência reduzindo com isso o ganho.
No oscilador que mostramos na figura 3, a fonte de 0,833 é aplicada a entrada positiva do amplificador operacional de modo a centralizar a tensão quiescente de saída em Vcc/2 = 2,5 V.
Oscilador de Deslocamento de Fase com um Amplificador Operacional
Um oscilador de deslocamento de fase pode ser elaborado com apenas um amplificador operacional, conforme mostra a figura 6.

É normal assumir que as diferentes seções de deslocamento de fase são independentes.
Assim, podemos escrever a seguinte equação para o circuito:

O deslocamento de fase para o loop completo é de -180 graus, já que o deslocamento de cada um dos três ramos é de -60 graus.
Isso vai ocorrer quando ß = 2ßf = 1,732/RC porque a tangente de 60 graus vale 1,73.
O valor de ß neste ponto é (1/2)3 , e com isso, o ganho de A deve ser igual a 8 para que o ganho do sistema seja igual a 1.
A frequência de oscilação do circuito na figura 6 com os valores dos componentes usados é de 3,76 kHz, um pouco diferente da frequência calculada que foi de 2,76 kHz.
Também deve ser considerado que o ganho para dar início as oscilações deve ser 26, diferente do ganho calculado de 8.
Estas discrepâncias são devidas parcialmente devido as variações de características dos componentes, mas o fator que mais contribui para isso é o fato de assumirmos que cada seção da rede RC não influi nas outras.
Esta configuração foi muito popular quando os componentes para a elaboração de configurações mais complexas eram caros.
Oscilador de Deslocamento de Fase "Bufferizado"
O circuito oscilador de deslocamento de fase bufferizado mostrado na figura 7 oscila numa frequência de 2,9 kHz, o que está mais próximo da frequência ideal calculada de 2,76 kHz e ele consegue oscilar com um ganho de 8,33 o que está também bem próximo do valor calculado 8.

Os buffers ou estágios amplificadores/isoladores evitam que as seções RC carreguem umas as outras e com isso o oscilador pode funcionar bem mais próximo dos valores de ganho e frequência calculados.
O ganho, fixado pelo resistor Rc, carrega a terceira seção RC e se um quarto amplificador operacional, numa configuração com 4 deles, bufferizar esta seção, a performance se torna ideal.
Sinais senoidais com baixa distorção podem ser obtidos da saída de cada amplificador, mas o melhor sinal estará na última seção RC.
Este é um nodo de alta impedância, o que significa que o circuito excitado deve ter uma alta impedância para evitar carga e também um deslocamento da freqüência causado por eventuais variações dessa carga.
Oscilador de Quadratura
O oscilador de quadratura é um outro tipo de oscilador de deslocamento de fase, onde cada uma das três seções é configurada para proporcionar um deslocamento de fase de 90 graus.
As saídas são rotuladas se seno e cosseno porque estão com uma defasagem de 90 graus, conforme mostra a figura 8.

O ganho desta configuração é calculado pela fórmula seguinte:

Quando R1C1 = R2C2 = R3C3 a equação pode ser reduzida para a seguinte forma:

Quando ß = 1/RC a equação fica reduzida à: 1ß-180 graus, o que quer dizer que a oscilação ocorre quando ß = 1/RC.
O circuito usado como teste oscilou em 1,65 kHz, um valor um pouco diferente dos 1,59 kHz calculados, e a discrepância foi atribuída às variações de valores dos componentes.
Oscilador de Bubba
O oscilador de Bubba, mostrado na figura 9, é um outro tipo de oscilador de deslocamento de fase, mas que tira vantagem dos amplificadores operacionais quádruplos que podem ser obtidos com facilidade hoje em dia.

Quatro seções RC proporcionam defasagens de 45 graus por seção, com um excelente dß/dt o que minimiza os desvios de frequência.
As saídas são obtidas de seções alternadas com baixa impedância.
Se as saídas forem obtidas de cada um dos amplificadores operacionais, os sinais terão 45 graus de defasagem.
A equação de realimentação é dada a seguir:
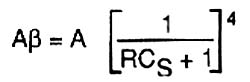
Quando ß = 1/RC a equação fica reduzida para as seguintes formulas:
O ganho deve ser igual a 4 para que a oscilação ocorra.
O circuito de teste oscilou em 1,76 kHz, um valor um pouco diferente dos 1,72 kHz quando o ganho foi 4,17.
Com baixo ganho A, e uma baixa corrente de polarização, o resistor que fixa o ganho Rg, não carrega a última seção RC o que leva o circuito a ter maior precisão de frequência.
Sinais senoidais com uma distorção muito pequena podem ser obtidos da junção de R e Rg.
Quando sinais de baixa distorção são necessários em todas as saídas, o ganho deve ser distribuído entre todos os amplificadores operacionais.
A entrada não inversora do amplificador de ganho é polarizada com 0,5 V de modo a fixar a tensão quiescente de saída em 2,5 V.
A distribuição de ganho exige que as outras entradas dos demais amplificadores sejam polarizadas, mas isso não tem efeito sobre a frequência do oscilador.
Conclusão
Os amplificadores operacionais têm seu uso limitado às frequências mais baixas do espectro, já que estes dispositivos não possuem uma faixa passante muito larga.
Os novos amplificadores operacionais com realimentação de corrente são difíceis de usar em osciladores pois eles são sensíveis às capacitâncias de realimentação.
Os amplificadores com realimentação de tensão são limitados a apenas algumas centenas de quilohertz já que eles também acumular um deslocamento de fase.
O oscilador de Ponte de Wien usa poucos componentes e sua estabilidade de freqüência é boa.
O oscilador de quadratura precisa de apenas dois amplificadores mas tem distorção mais elevada.
Os osciladores por deslocamento de fase, especialmente o Bubba, têm menor distorção e melhor estabilidade de frequência.
A escolha para um determinado projeto depende, portanto das necessidades do projetista que deve levar em conta todos os fatores abordados neste artigo.
Mais informações podem ser obtidas no site : www.ti.com/sc/amplifiers