










Uma alternativa importante para a montagem de circuitos eletrônicos, principalmente os protótipos ou circuitos experimentais é a que faz uso da matriz de contactos. Estudantes, professores e mesmo os profissionais podem desejar fazer uma montagem experimental para verificar o desempenho de um circuito, antes de partir para uma versão definitiva em placa de circuito impresso. Da mesma forma, profissional desenvolvedor pode precisar de um circuito de prova para verificar o estado de um componente dedicado ou ainda testar uma nova configuração em fase de criação.
Utilizando as matrizes de contactos pomos realizar praticamente qualquer tipo de montagem, incluindo as mais complexas, com muitos circuitos integrados, com a vantagem de não se necessitar de soldagens, não se exigir o corte de terminais de componentes, o que pode levá-los à inutilização para outros usos e facilitando ainda a troca de configurações sem muito trabalho. Numa série de dois artigos, iniciando nesta edição veremos como utilizar as matrizes de contactos em seus projetos, um recurso que, sem dúvida alguma, o leitor nunca mais dispensará.
A solução mais “limpa” e racional que podemos adotar atualmente para a experimentação, desenvolvimento de projetos e mesmo para o ensino é a dada pela matriz de contacto, também conhecida como “protoboard” ou “veroboard”, dos nomes originais com que foram lançadas no exterior.
Uma matriz de contacto é formada por uma base de plástico na qual existem centenas de orifícios onde podem ser encaixados, sem muito esforço, os terminais da maioria dos componentes eletrônicos comuns como resistores, capacitores, transistores, circuitos integrados, etc. O encaixe desses componentes ao mesmo tempo proporciona uma fixação mecânica e contactos elétricos que permite sua fácil interligação formando o circuito desejado.
Os componentes que não podem ser encaixados diretamente podem ser ligados através de fios soldados aos seus terminais, conforme veremos mais adiante.
O módulo básico de uma matriz contém 550 orifícios ou pontos de ligação. Vários módulos podem ser colocados, lado a lado, numa base, de modo a se ampliar o número de pontos de conexão, para a elaboração de um projeto mais complicado, conforme mostra a figura 1.
Nessa figura mostramos uma matriz de contacto e alguns conjuntos contendo diversos módulos, base de trabalho e até mesmo fonte de alimentação.
O encaixe de fios e terminais dos componentes nos orifícios faz com que eles fiquem presos firmemente a contactos de metal, e além disso tenham a garantia de um contacto elétrico perfeito, conforme mostra a figura 2.
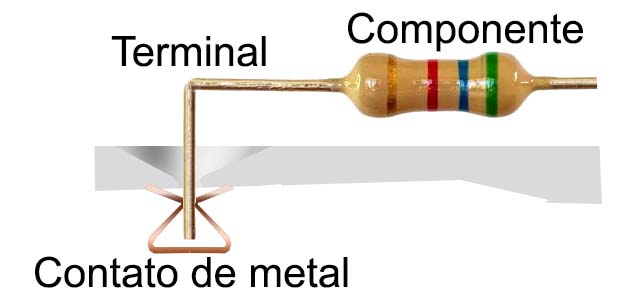
A disposição dos furos na matriz, assim como dos contactos, é planejada segundo critérios que visam facilitar a elaboração dos circuitos.
A partir desse planejamento podemos, não só reproduzir praticamente qualquer circuito eletrônico, encaixando diretamente os terminais dos componentes e fios de ligação, como também usar circuitos integrados com invólucros SIL ou DIL (Single In Line e Dual In Line) convencionais, conforme mostra a figura 3.
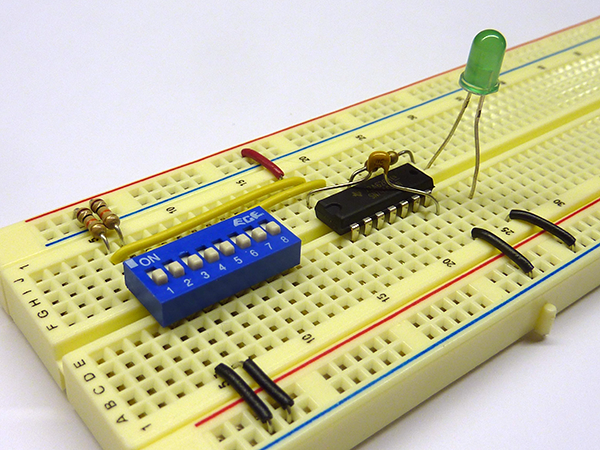
De fato, o planejamento das conexões dos contactos internos da placa é tal que os circuitos integrados DIL (Dual in Line), que levam duas filas de terminais paralelos, se encaixam numa posição extremamente favorável para a elaboração dos projetos. Os contactos têm ainda determinadas interligações que facilitam a obtenção dos nós de conexão dos circuitos, e que são justamente os pontos em que terminais de diversos componentes podem ser interligados.
Em suma, encaixando fios e componentes de forma apropriada podemos realizar montagens perfeitas, no sentido de garantir contactos sem problemas, ligações curtas (com um mínimo de capacitâncias e indutâncias parasitas) e sustentação mecânica firme, permitindo transportar o projeto de um local para outro em segurança sem o perigo de que os componentes se soltem.
Mas, a facilidade de se modificar configurações se mantém, pois os componentes podem ser trocados, mudados de posição com extrema facilidade, e tudo isso sem a necessidade de soldagens ou corte dos terminais dos componentes (que os inutiliza para outras aplicações).
Essa versatilidade torna-a ideal para experimentação e desenvolvimento pois podemos trocar componentes diversas vezes com rapidez e segurança, até obter o valor ideal para o desempenho que desejamos. A utilidade das matrizes de contactos pode ser avaliada pela quantidade e complexidade das montagens que podemos realizar.
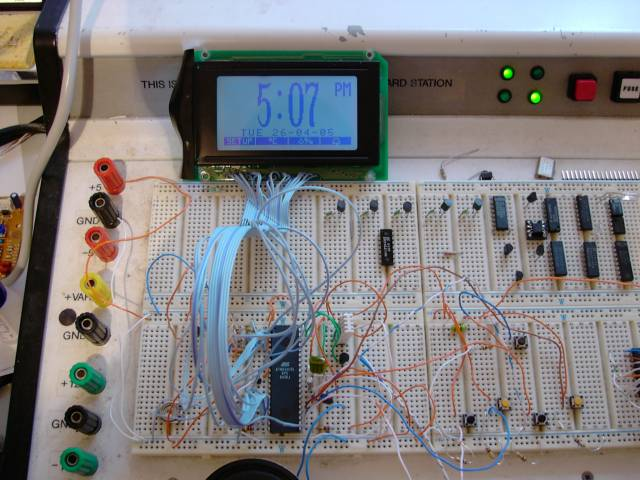
Na figura 4 temos uma montagem bastante complexa utilizando microprocessador e mostradores num circuito digital, tudo em duas matrizes de contactos de 550 pontos, colocadas lado a lado.
Mas, a versatilidade da matriz não termina por aí: dispondo de diversas matrizes o leitor pode trabalhar com blocos de montagem. Isso significa que, enquanto se mantém funcionando numa uma fonte simétrica ou um pré-amplificador numa, a outra pode ter um amplificador de potência ou um oscilador em outra e depois, eles podem ser interligados para experiências que levem à otimização do projeto final, ou à demonstrações numa sala de aula.
Para os leitores, profissionais desenvolvedores, amadores, professores e estudantes recomendamos, em especial, pelo menos um módulo de uma matriz padrão de 550 pontos. Esses módulos consistem numa excelente plataforma de montagem para cursos técnicos e mesmo de matérias eletivas (educação tecnológica) das escolas de ensino fundamental e médio ou ainda para o desenvolvimento de projetos de mecatrônica.
Projetos eletrônicos associados ao ensino de física, química, biologia e outras matérias podem ser facilmente implementados nestas matrizes.
Os leitores, depois de verificarem sua utilidade, certamente desejarão ter outros módulos, o que não podemos censurar.
COMO USAR A MATRIZ DE CONTACTOS
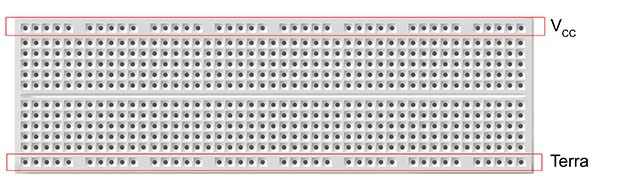
Começamos por mostrar uma matriz de contactos típica de 550 pontos na figura 5.

Conforme podemos ver, existem duas filas horizontais de furos, na parte superior e inferior da matriz colocada na posição indicada. Todos os furos de cada uma dessas filas estão interligados, o que quer dizer que, se colocarmos o pólo positivo numa delas, todos os componentes com os terminais enfiados em qualquer furo desta fila estará sendo alimentado por uma tensão positiva.
Essas filas são justamente destinadas, na maioria dos projetos, às linhas de alimentação: o normal é ligar numa delas o positivo da fonte que vai alimentar o circuito e na outra o negativo ou ponto de zero volt.conforme mostra a figura 6.

Fica então bastante fácil fazer as conexões dos componentes do projeto: os que vão ao positivo têm seus terminais conectados à linha superior de alimentação e os que vão ao 0 V ou ao terra do circuito, à linha inferior.
Na figura 7 temos um exemplo prático disso: o capacitor C1 e o resistor R1 estão aterrados (0V) enquanto que R2 e D1 estão no positivo da alimentação, conforme mostram os diagramas correspondentes junto à figura 7.

A região central da matriz de contactos é formada por filas verticais de furos. Nela, os furos de cada fila possuem contactos interligados entre si por barras de de metal que não são visíveis. Dessa forma, todos os 5 furos de cada fila são interligados. Percebe-se então que componentes ligados numa mesma fila vertical fazem contacto elétrico entre si.
As duas regiões com as filas verticais são separadas por um sulco que corresponde justamente as dimensões de separação padronizadas das carreiras de pinos de um circuito integrado DIL (Dual In Line) comum e de muitos outros componentes, como relés e “arrays” de resistores e capacitores ou displays. Na figura 8 mostramos como esses componentes se encaixam perfeitamente nessa parte do circuito ficando com seus terminais conectados às filas verticais de contactos.

Para desenvolvermos um projeto a partir desta disposição de pinos é muito simples. Basta localizar os terminais de um transistor, por exemplo (emissor, coletor e base), e encaixar um em cada uma de três filas verticais adjacentes (*).
(*) Observamos que é muito importante sempre ter como consultar a disposição dos terminais dos componentes utilizados. Nem sempre o terminal do meio é a base num transistor! Para os SCRs vale o mesmo. O terminal de disparo pode variar de posição. Nos circuitos integrados, por exemplo, é preciso conhecer a função de cada pino.
Depois é só conectar os diversos componentes de polarização e acoplamento (resistores e capacitores) de acordo com o diagrama, conforme mostra a sequência de imagens a seguir.
No nosso exemplo temos então R1 fazendo conexão do positivo da fonte de alimentação à base do transistor; R2 da base do transistor ao ponto de 0 V da alimentação e R3 do positivo da alimentação ao coletor do transistor. Depois, temos o capacitor C1 fazendo conexão com a base do transistor, de modo a servir de passagem para o sinal de entrada (acoplamento) e C2 ligado ao coletor do transistor, servindo de passagem do sinal de saída para esta etapa amplificadora (acoplamento).
Para trabalhar com um circuito integrado o procedimento não se altera.
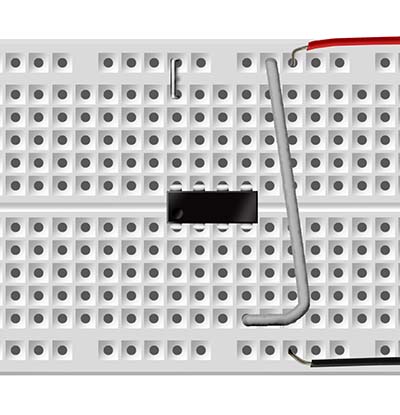
Vamos tomar como exemplo a montagem do oscilador (astável) com o conhecido circuito integrado 555 e que tem a imagem mostrada na figura 8.
Nesse circuito, um LED é o elemento de saída, devendo piscar numa freqüência que depende basicamente do capacitor C1. O leitor vai perceber a facilidade com que pode trocar este componente até obter as freqüências desejadas de operação do circuito.
Os resistores R1 e R2 também determinam a frequência do oscilador, e o leitor também poderá trocar esses componentes, observando como eles influem no ciclo ativo de funcionamento do oscilador.
Vejamos como a montagem desse oscilador pode ser feita na matriz de contactos.
Fase 1
Em primeiro lugar vamos fazer a ligação do circuito integrado à alimentação positiva. Vemos pelo diagrama que isso é feito nos pinos 4 e 8.
Esses dois pinos serão interligados através de fios e depois, na mesma fila de um deles (8), podemos colocar um segundo fio que faz a conexão com a linha positiva de alimentação.
Fase 2
O próximo passo na montagem será fazer a conexão da linha de 0 V da alimentação, que deve ir ao pino 1 do circuito integrado. Para essa finalidade colocamos um fio em qualquer furo da linha que conecta ao pino 1 e o ligamos a qualquer furo da linha horizontal de 0 V.

Fase 3
Passamos agora à interligação dos pinos 2 e 6 do circuito integrado, o que pode ser feito por um fio nos pontos das filas que fazem contacto com aqueles pinos.

Fase 4
Agora, de qualquer das filas que têm conexão com os pinos 2 ou 6 podemos fazer a ligação do pólo positivo do capacitor C1.
O outro pólo do capacitor vai a um ponto mais próximo da linha de 0 V.

Fase 5
Passemos à ligação dos resistores R1 e R2. O resistor R1 tem um dos terminais colocado na linha positiva de alimentação e o outro terminal num furo que tenha conexão com o pino 7 do circuito integrado.
O resistor R2 tem um dos terminais na mesma fila em conexão com o pino 7 e o outro num furo que tenha conexão com o pino 6 ou 2, já que eles estão interligados.

Fase 6
A saída do circuito integrado, que corresponde ao pino 3, vai à base do transistor através do resistor R3. Veja então que fixamos o transistor com os terminais em 3 filas diferentes e o resistor vai ter um dos seus terminais conectado justamente à fila que corresponde à base.
O outro terminal do resistor vai à fila que tem conexão com o pino 3 do circuito integrado.

Fase 7
O emissor do transistor vai ser ligado, por um fio, à linha positiva da alimentação.
Fase 8
O último passo na montagem será a ligação do resistor R3 e do LED.
O resistor R3 tem um dos terminais conectado na fila que faz contacto com o coletor do transistor. O outro terminal deve ir a uma fila que, inicialmente estará livre, mas que tenha facilidade para conexão do anodo do LED.
Fixamos então na mesma fila o anodo do LED e o catodo na linha próxima de alimentação negativa. Depois de conferir a montagem pelo diagrama, anotando todas as ligações e se todos os componentes foram colocados nas posições corretas, podemos ligar a alimentação, encaixando os fios do suporte de pilhas ou mesmo de uma pequena fonte.
Para o experimentador é interessante ter alguns componentes que não se encaixam na matriz mas têm uso freqüente em projetos, preparados com pedaços de fios rígidos de comprimento apropriado.
Também é interessante ter pequenos pedaços de fio rígido, conforme mostra a mesma figura, que podem ser encaixados nos furos fazendo interligações de filas. Os melhores fios para serem utilizados nas montagens em matrizes de contactos são os fios rígidos finos, como os usados em telefonia, e devem ser os mais retos possíveis, garantindo assim um aspecto impecável, mesmo a uma montagem experimental.
Na segunda parte desse artigo mostraremos mais algumas montagens em matrizes de contactos e daremos até um projeto para o próprio leitor treinar.
Veja Também: Como Usar matriz de contatos - Parte 2
