










Controles de velocidade para motores universais alimentados pela rede de energia de corrente alternada são importantes não só em eletrodomésticos como também em aplicações industriais. Os circuitos tradicionais com poucos componentes discretos estão sendo substituidos cada vez mais por controles inteligentes que fazem uso de circuitos integrados dedicados como o TDA1085C. Neste artigo descrevemos um controle de velocidade para motores com o TDA1085 da ON Semiconductor. (2001)
Os circuitos tradicionais de controle de potência para motores universais e dimmers para rede de energia usam triacs que são controlados por uma rede de retardo e um dispositivo de disparo (normalmente um diac) para determinam o ponto de condução em cada semiciclo.
No entanto, as aplicações mais modernas exigem funções adicionais mais complexa que não só visam melhorar o desempenho de tais circuitos como também proporcionar maior economia e menor consumo de energia.
Existem diversos circuitos integrados bastante comuns dedicados a função de controlar a velocidade de motores univerais e um dos mais modernos é o TDA1085C da On Semiconductor.
Este circuito integrado, que é fornecido em invólucro DIL (Dual in Line) tipo Case 648 e com o diagrama de blocos da figura 1, tem os seguintes destaques:

Destaques:
* Conversor frequência-tensão on-chip.
* Gerador de rampas on-chip
* Partida suave
* Limitação da corrente de carga
* Sensor gerador tacométrico
* Alimentação direta da linha de energia
* Funções de segurança implementadas num circuito monitor
O circuito
O TDA1085C dispara um triac de acordo com a velocidade exigida para o motor. A velocidade deste motor é sensoriada digitalmente e a informação convbertida numa tensão analógica. Desta forma, a velocidade pode ser fixada externamente e aplicada ao circuito deb regulação interna para controle.
As funções dos pinos são as seguintes:
Regulador de tensão - pinos 9 e 10 - estes pinos dão acesso ao circuito regulador do tipo paralelo que pode drenar uma boa corrente. A corrente é fornecida de um divisor externo (R1 e R2 do circuito de aplicação) e um retificador. Neste circuito temos um filtro capacitivo duplo ue também ajuda a remover os ruídos do motor controlado.
Sensoriamento de velocidade - esta função é acessada pelos pinos 4, 11 e 12. O circuito é compatível com um sensor externo analógo. Na maioria das aplicações usa-se um gerador tacométrico simples que não precisa de ajustes.
Gerador de rampa - esta função é acessada pelos pinos 5, 6 e 7. O valor real da velocidade ajustada leva em consideração a regulagem deste regulador. Com o valor ajustado, o gerador de rampa carrega um capacitor externo de modo a obter a comutação no momento certo.
Amplificador de controle - pino 16 - este amplificador tem por função amplificar a diferença entre a velocidade real (pino 4) e a velocidade fixada (pino 5) através do gerador de rampa. Sua saída está disponível no pino 16 e consiste numa fonte de corrente com uma capacidade máxima de +/- 100 uA e uma transcondutância de 340 uA/V (tip). Este pino pode excitar diretamente o gerador de pulsos de disparo e deve ser carregado com uma rede elétrica que compensa as características elétricas do motor e sua carga. A rede ligada a este pino deve ser ajustada experimentalmente.
Gerador de Pulsos de disparo - pinos 1, 2, 5, 13, 14 e 15 - este circuito tem quatro funções.
* Conversão do nível da saída do amplificador DC de controle para um ângulo proporcional de disparo a cada meio ciclo do sinal da rede de energia.
* Duração do pulso de calibração
* Repetição do pulso se o triac falhar de modo a manter sua corrente ou se ela for interrompida pelas escovas.
* Atrasar o pulso de disparo até que a corrente passe por zero em ânglos maiores de disparo ou cargas indutivas.
Limitador de Corrente - pino 3 - As condições seguras de operação do motor e do triac sob quaisquer condições são asseguradas pela limitação do pico de corrente.
A corrente no motor desenvolve uma tensão alternada no resistor de shunt de 0,05 Ω - na aplicação. Os picos negativos desta tensão são levados ao pino 3 que está ajustado para um nível determinado de tensão pelos resistores R3 e R4. Quando a corrente do motor aumenta, o circuito entra em ação e reduz o ângulo de disparo de modo a compensar este efeito.
Circuito de Aplicação
Na figura 2 damos um circuito prático de aplicação deste componente num controle de velocidade completo.

Um dos pontos críticos para este tipo de projeto é a placa de circuito impresso, já que normalmente o triac e o TDA1085C são montados na mesma placa. Como nela encontramos sinais tanto de altas correntes como de poucos milivolts, uma realimentação que afete o circuito pode ocorrer.
Assim, no projeto desta placa devemos tomar cuidado para que:
* Devem ser usados capacitores de desacoplamento nos pinos de de entrada do comparador e eles devem estar mais próximos possíveis dos pinos do CI e aterrados no mesmo ponto.
* As conexões à terra para o gerador tecométrico devem ser feitas diretamente no pino 8.
* O padrão de terra usado para a placa deve ser do tipo "estrela" de modo a eliminar completamente as correntes mais intenas no circuito de terra onde estão ligados os capacitores de desacoplamento.
Na figura 3 temos um desenho de placa de circuito improesso sugerido pela própria ON para a montagem deste controle.
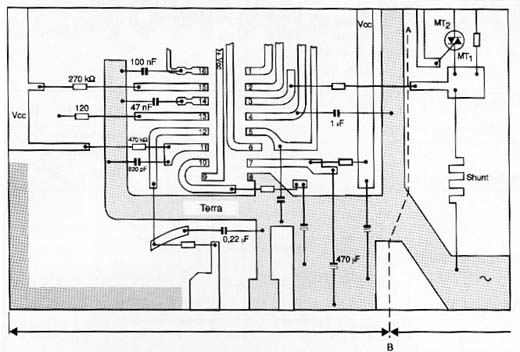
Observe a separação do circuito de potência do circuito de controle indicada pela linha AB.
Este tipo de disposição de componentes é especialmente importante se o circuito for empregado para uma linha de produção em massa.
Observe a preseça do gerador tacométrico que deve ser ligado ao pino 12 e acoplado mecanicamente ao motor.
Este circuito de aplica a motores com uma faixa de rotação de 0 a 15 000 rpm e o gerador tacométrico de 8 polos deve fornecer uma saída de 30 V pico a pico com uma rotação de 6000 rpm em circuito aberto.
O triac usado é o MAX15A-8 de 16 A para 600 V ou um equivalente que tenha uma corrente de disparo (Igt) min de 90 mA para cobrir o uarto quadrante à 10 oC.
O resistor R16 depende do tipo de motor e tipicamente não deve ser inferior a 33 k Ω. O resistor R15 determina a corrente de discarga do sinal dente de serra.
R4 determina a limitação de corrente e seu valor depende do motor.
Ajustes:
O ajuste é feito pela medida de tensão no pino 5:
Rodando a 800 rpm fixe em 609 mV incluindo correções de não linearidade.
A 1300 rpm ajuste para 996 mV incluindo correções de não linearidade. Ajuste na velocidade 1 de 7500 rpm para 5,912 V incluindo correções de não linearidade. Na velocidade 2 de 15 000 rpm ajuste a tensão para 12,000 V como ponto de ajuste.
Obs: numeração de acordo com o diagrama original da ON onde saltam alguns número de resistores e capacitores. Mais informações no site da ON em http://onsemi.com
CI-1 - TDA1085C - circuito integrado
D1 - 1N4007 - diodo de silício
Triac - ver texto
Resistores: 1/8W, 5%
R1, R2 - 820 k Ω
R3 - 2,7 k Ω
R4 - Ver texto
R5 - 680 Ω
R6 - 47 k Ω
R7 - 1,5 M Ω
R8, R16 - 68 k Ω
R9 - 150 k Ω
R10 - ver texto
R11 - 470 k Ω
R12 - 22 k Ω
R13 - 120 Ω
R14 - 270 Ω
R15 - 6,8 k Ω
R17 - 100 Ω
P1 - 50 k Ω - potenciômetro
Shunt - 50 mΩ
Capacitores:
C1, C2, C3 - 1 µF - eletrolíticos
C4 - 220 nF - poliéster
C5 - 47 µF - eletrolítico
C6, C9 - 100 µF - eletrolíticos
C7 - 470 µF - eletyrolítico
C8 - 100 nF - poliester
C11 - 820 pF - cerâmico
C14 - 47 nF - poliéster
C16 - 100 nF - poliéster
Diversos:
Placa de circuito impresso, radiador de calor para o triac, fios, solda, etc.
