Uma condição fundamental para a gravação e reprodução corretas de um aparelho de videocassete é a manutenção da velocidade do sistema mecânico, como a velocidade da fita, a velocidade do cilindro em que estão as cabeças de reprodução e gravação. Para a manutenção das velocidades dos sistemas mecânicos são usados servomecanismos que formam um servossistemas. Para o técnico reparador desses aparelhos é de suma importância conhecer o princípio de funcionamento dos principais servossistemas que são usados nos aparelhos comerciais de modo que eles possam ser ajustados ou reparador convenientemente. Neste artigo explicaremos de modo simples como esses sistemas funcionam.
Este artigo é de 1996 quando os Videocassetes ainda eram comuns. Hoje totalmente substituídos pelos DVDs, ele ainda pode ser útil para aqueles que utilizam um videocassete antigo na recuperação de fitas e sua passagem para DVDs.
Um servossistema nada mais é do que um conjunto de elementos mecânicos e eletrônicos cuja finalidade é manter as características de funcionamento de um mecanismo que se movimenta como por exemplo sua velocidade, fase, ponto de parada, etc.
Nos aparelhos de vídeo cassete, como o leitor sabe, ao mesmo tempo em que a fita se movimenta, deslocando-se no sentido de seu comprimento, as cabeças de leitura e de gravação também se movimentam girando num cilindro de modo a fazer a varredura transversal da fita, conforme mostra a figura 1.

Para que as imagens sejam gravadas e reproduzidas convenientemente tanto a velocidade da fita e cilindro como o ponto em que a cabeça é ativada na varredura de cada trilha são importantes e isso exige a atuação de um sistema de grande precisão, no caso os servossistemas.
Basicamente são as seguintes as funções dos servossistemas num equipamento de videocassete:
1. NA GRAVAÇÃO
* Sincronizar as posições das cabeças de vídeo com os impulsos verticais de quadro do sinal de vídeo que deve ser gravado.
* Estabilizar a velocidade dos motores que movimentam o cilindro e o deslocamento da fita.
* Gravar um sinal de controle na borda da fita de modo que ele possa ser usado na sincronização do sistema quando a imagem for reproduzida.
2. NA REPRODUÇÃO
a) Velocidade normal (PLAY)
* Manter constante a velocidade dos motores (deslocamento da fita e rotação do cilindro).
* Ler a pista de controle para usar seus sinais como referência para o movimento do cilindro e da fita.
* Sincronizar a posição das cabeças de leitura com os impulsos da pista de controle.
b) Velocidade menor (SLOW)
* Reduzir a velocidade do motor que movimenta a fita (cabrestante) e estabilizar seu movimento.
* Estabilizar a velocidade do motor que aciona o cilindro e sincronizar a posição das cabeças de leitura de vídeo.
c) Velocidade maior (CUE)
* Aumentar a velocidade do motor de movimentação da fita (cabrestante) e estabilizar seu movimento.
* Estabilizar a velocidade do motor do cilindro em que estão as cabeças de leitura e gravação e sincronizar a posição das cabeças.
* Sincronizar o oscilador de referência com os impulsos gravados na pista de controle da fita.
PRINCÍPIO DE FUNCIONAMENTO DOS SERVOS
As informações numa fita de vídeo são gravadas em diversas pistas conforme mostra a figura 2.

O sinal de vídeo, que é o mais importante, aparece na forma de trilhas transversais, correspondendo cada trilha a um campo, o que significa uma varredura em 1/60 segundos, ou uma velocidade de 1 800 rpm para os tipos de duas cabeças.
Lateralmente são gravados os sinais de áudio e os sinais de controle.
Isso significa que, para a reprodução e gravação dos sinais de vídeo, além da velocidade correta da cabeça ao passar pela trilha, deve ocorrer um sincronismo no sentido de que ela passe pelo início da trilha no momento em que começa a varredura do quadro.
A manutenção da velocidade e do sincronismo é feita por um circuito que basicamente tem a estrutura mostrada na figura 3.

O dispositivo cuja velocidade deve ser mantida deve ter algum tipo de sensor que permita ao circuito eletrônico monitorar sua velocidade ou posição a cada instante. Este dispositivo pode ser mecânico, óptico ou magnético sendo as duas últimas soluções as mais adotadas nos videocassetes.
O sensor envia o sinal ao circuito eletrônico que faz sua comparação com um sinal de referência, ou seja, que indique qual é a velocidade ou posição que deve ser levado o dispositivo que se movimenta.
A comparação dos dois sinais gera um sinal de "erro" que tem por finalidade atuar sobre o dispositivo que corrige a velocidade ou posição no sentido de levá-la ao normal.
Este dispositivo pode tanto atuar sobre o motor, reduzindo ou aumentando sua tensão de alimentação, como por atuar diretamente sobre o sistema mecânico impondo-lhe uma carga ou liberando de modo a funcionar como um freio.
SERVOS DO VIDEOCASSETE
Encontramos três servossistemas nos aparelho de vídeo cassete e que vamos analisar a seguir:
a) servo do cilindro que controla a velocidade e fase do scanner ao mesmo tempo em que a velocidade de deslocamento da fita (cabrestante) é mantida constante.
b) servo do cabrestante (capstan) que controla a velocidade do cabrestante e a fase do scanner.
c) servo de tracking do cabrestante que controla a velocidade e fase desse dispositivo enquanto o scanner é mantido em rotação constante.
Analisemos o funcionamento de cada um:
a) Servo do Cilindro
Na figura 4 temos um diagrama simplificado do servossistema que mantém a fase e a rotação do cilindro do videocassete.

O sensor deste servossistema é do tipo magnético. Temos então um pequeno imã que é colocado na parte móvel do tambor (parte superior). Uma bobina fixa colocada nas proximidades de modo que a cada passagem do imã é gerado um pulso de referência.
Quando o videocassete está na posição de gravação de um programa (REC) o pulso de sincronismo vertical do sinal recebido é dividido por 2 obtendo-se assim uma frequência de 30 Hz. Esse sinal de 30 Hz é levado a um comparador juntamente com o pulso de referência captado pelo sensor. se os dois sinais estiverem com frequência e fase iguais, não temos sinal de erro na saída e tanto a velocidade como a fase são mantidas.
No entanto, se houver uma diferença de fase ou frequência entre os sinais é gerado um sinal de erro que é aplicado a um sistema de freio eletromagnético com a finalidade de corrigir sua velocidade.
Este freio nada mais é do que uma bobina que passa a apresentar uma carga maior quando energizada pois atua com um campo magnético no sistema mecânico que movimenta o sistema, conforme mostra a figura 5.

Na prática, como o freio tende sempre a reduzir a velocidade do motor, ele em condições normais é ajustado para girar numa velocidade um pouco maior do que 30 Hz (1 800 rpm). A frequência dos pulsos é então, normalmente de 30,4 Hz neste dispositivo.
Quando o videocassete se encontra na posição de reprodução (PLAY) o sinal de referência é fornecido por um sensor de posição.
Esse sensor nada mais é do que um cabeçote posicionado de modo a captar os pontos magnetizados de referência na borda da fita, conforme mostra a figura 6.

Os pulsos obtidos neste sensor indicam ao sistema quando o cabeçote está pronto para começar a varredura de uma trilha.
Este sinal é então levado também ao mesmo comparador onde é comparado com o sinal de referência captado pelo sensor do cilindro. Novamente, temos a produção de uma tensão de erro que mantém a fase e a velocidade do sistema dentro do valor desejado.
b) Servo do Cabrestante
A finalidade deste servo é manter constante e em fase o movimento da fita. Na figura 7 temos um diagrama simplificado deste sistema.

Conforme os leitores que trabalham com videocassetes sabem o cabrestante ou capstan consiste num cilindro rotativo que pressiona a fita contra um rolete denominado "pinch roller" de modo que ao girar faz a tração dessa fita.
O acionamento do cabrestante normalmente é feito de forma indireta, ou seja, o motor transfere o movimento ao sistema por meio de uma correia.
Neste sistema o controle de velocidade também usa um sensor magnético. Este sensor consiste num pequeno imã que roda no sistema mecânico do cabrestante gerando um pulso a cada volta quando passa diante de uma bobina captadora.
Os pulsos gerados por este sensor são levados a um comparador que os compara ao sinal que é obtido de um oscilador de referência. Este oscilador, para maior precisão é controlado por um cristal. Trata-se de o VXO (Crystal Controlled Oscillator). Como os cristais normalmente têm frequências elevadas, para se obter a baixa frequência desejada, o sinal gerado passa por um divisor, obtendo-se assim os pulsos de referência para o comparador.
Novamente, se a velocidade do cabrestante não tiver o valor desejado ou a fase é gerado um sinal de ero que tende a fazer sua correção.
Neste sistema, entretanto, a velocidade do sistema é controlada diretamente pela tensão no motor. O motor é de corrente contínua, o que permite que o comparador aumente ou diminua sua velocidade.
É importante notar que este servo atua somente sobre a velocidade de deslocamento da fita. A sincronização dessa fita de modo a se obter o posicionamento correto das trilhas no início de cada varredura é feito pelo servo de "tracking".
c) Servo de Tracking ou Traçado do Cabrestante
Na figura 8 temos o diagrama do sistema de servo de traçado do cabrestante de um videocassete.

Existem variações para todos os circuitos que vimos, de modo que, dependendo do tipo de aparelho as configurações podem ser mais ou menos elaboradas.
Na condição de gravação (REC) este sistema funciona da seguinte maneira.
O motor do cabrestante faz girar um sistema gerador de impulsos que produz um sinal de frequência que depende da rotação. Este sinal deve ser de 60 Hz na condição normal de rotação.
Este sinal passa então por um processamento que o leva a um comparador que o compara com os pulsos de sincronismo do sinal granado e onde é gerada a tensão de erro. Esta tensão, como nos sistemas anteriores atua sobre o motor de modo a manter sua velocidade e fase.
Este sistema usa multivibradores que produzem pulsos que devem ser mantidos em fase para que o sincronismo do motor com as trilhas sejam conseguido.
Na reprodução (PLAY) o sinal da cabeça de controle é comparado com o sinal do oscilador de referência, sendo gerada uma tensão de erro.
Esta tensão altera a rotação do motor e também a frequência do gerador de modo que o comparador é realimentado detectando o instante em que os valores se igualam e a tensão de erro cancelada.
O oscilador de referência também produz os pulsos que são comparados com o do sensor de modo a se conseguir a correção que leva a operação com a fase correta.
MANUTENÇÃO
Os ajustes dos servossistemas usados nos videocassetes envolvem tanto frequências como tensões.
As tensões são aquelas que correspondem aos sinais de erro, alimentação dos motores enquanto que as frequências correspondem aos pulsos que são gerados pelos sensores.
Assim, os dois principais instrumentos que devem ser usados na manutenção de servossistemas são o multímetro e o osciloscópio.
Os fabricantes dos aparelhos fornecem então em seus manuais informações que permitem ajustar cada um dos três servossistemas que vimos com base nos sinais gerados e nas tensões medidas em determinados pontos, por exemplo, os trimpots de ajustes.
Se bem que muitos ajustes possam ser feitos tendo por base somente os sinais gravados de uma emissão normal de TV, também existem aqueles que exigem a utilização de uma fita padrão para esta finalidade.
Os técnicos que trabalham com videocassetes não podem dispensar a ajuda desta fita.
Os ajustes principais que devem ser feitos são:
a) Servo do cilindro
Ajustes:
* Ajuste de fase do servossistema (trimpot)
* ajuste de velocidade (trimpot)
Instrumentos:
* Multímetro
* Osciloscópio
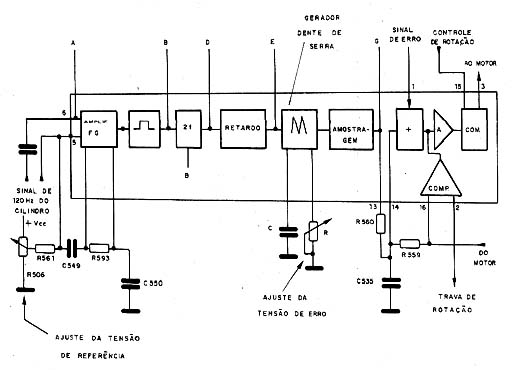
Na figura 9 temos um circuito típico para este servo mostrando os pontos de ajustes como são encontrados nos manuais técnicos.
b) Servo de velocidade do cabrestante
Ajustes:
* velocidade do motor (trimpot)
Instrumentos:
* Multímetro
c) Servo de tração do cabrestante
Ajustes:
* Controle de tracking (trimpot)
Instrumentos:
* osciloscópios (observação dos pulsos)
OBSERVAÇÕES FINAIS
É comum em eletrônica que os termos técnicos da maioria dos equipamentos e funções sejam mantidos em inglês. Assim, o técnico está muito mais acostumado a falar em PLAY em lugar de "reproduzir", SLOW em lugar de "lento" ou mesmo "FORWARD" em lugar de "para frente".
No entanto, para os termos em que existem equivalentes já de uso bem comum é interessante que o técnico se acostume a usar o da nossa língua.
Assim, não se justifica usar "capstan" quando em nossa língua temos o termo equivalente "cabrestante" e o termo "tracking" quando temos o "traçado".
Evidentemente, para não confundir os leitores acostumados com os termos originais em inglês, usamos os dois neste nosso artigo.