









Os radares que detectam excesso de velocidade de veículos são certamente os mais conhecidos dos leitores. No entanto, os radares são empregados numa grande quantidade de aplicações práticas importantes como no controle do tráfego aéreo, na detecção de tempestades e com finalidade bélicas detectando inimigos. Como funciona o radar e de que modo eles podem ser usados nas aplicações que citamos é a finalidade deste artigo.
A ideia de se detectar objetos à distância pela reflexão de ondas não pode ser considerada coisa exclusiva do homem. A natureza, muito tempo antes de existirmos, já havia "equipado" diversas criaturas com este sistema, cuja eficiência talvez tenha sido o principal motivo de sua cópia pelo homem.
Mas, sem dúvida a criatura que mais chama a atenção pela utilização desse sistema, e que pode ser analisado como principal inspirador dos modernos sistemas de Radar, é o morcego. É justamente deste animal que partimos nas nossas explicações pois entendendo o comportamento desta pequena criatura poderemos, com muita facilidade, chegar aos princípios de funcionamento usados nos modernos sistemas de detecção a distância, conhecidos como Radares.
O MORCEGO
O que o morcego possui na verdade é um sistema de Sonar, pois em lugar de rádio ele usa ondas sonoras (O R de radio é substituído por S de som).
Estes pequenos animais podem voar na mais completa escuridão, sem colidir com qualquer obstáculo, mesmo os de menores dimensões e em movimento, utilizando um sofisticado sistema de emissor e detector cujo princípio de funcionamento explicamos a seguir.
Os morcegos emitem "gritos" de elevadíssima frequência, acima dos 40 kHz os quais, pelo seu comprimento de onda, podem refletir com facilidade nos menores objetos que estejam no seu caminho.
Para que o leitor tenha uma idéia do que representam estes 40 kHz basta dizer que a faixa de audição de uma pessoa normal se estende apenas dos 15 aos 15 000 Hz aproximadamente. Algumas espécies de morcegos chegam a emitir "gritos" de frequências que se aproximam dos 100 kHz.
O sistema de audição dos morcegos não se caracteriza somente pela capacidade de ouvir sons nestas frequências elevadíssimas, mas também pela sua sensibilidade e diretividade, podendo captar ecos fraquíssimos e imediatamente perceber a direção de onde eles procedem, conforme mostra a figura 2.
Com os gritos sucessivos, o morcego vai varrendo o ambiente em que está, recebendo informações sobre tudo que está à sua frente, formando assim uma "imagem" baseada em ecos desse ambiente, conforme mostra a figura 3.
É até hoje intrigante o fato de que milhares e até milhões de morcegos podem viver na mesma caverna, voar em bandos, e seus sistemas de orientação não se interferem. Pesquisas têm sido feitas no sentido de se descobrir como eles fazem isso, pois a descoberta do processo certamente viria ajudar no desenvolvimento de técnicas novas para os sistemas de Radar que usamos hoje em aeronaves e em aplicações militares.
O tamanho mínimo do objeto que pode ser detectado por um eco é dado pelo seu tamanho. Se o objeto for muito menor que o comprimento de onda do som usado, até uns 10% desse comprimento, a reflexão já não ocorre e não há éco para ser percebido, como mostra a figura 4.
O comprimento da onda de um som ou onda de rádio depende tanto de sua frequência como de sua velocidade.
Se um som tiver uma frequência de 3 400 Hz, por exemplo e se propagar com uma velocidade de 340 metros por segundo, isso significa que em 1 segundo terão sido produzidas 3 400 "ondas" ou ciclos completos e que terão percorrido uma distância de 340 metros.
É fácil perceber então que, se distribuirmos estas 3 400 "ondas" em 340 metros, cada uma ocupara um espaço de 10 cm.
Dizemos então que o comprimento de onda correspondente a um som de 3 400 Hz é de 10 cm.
Basta dividir a velocidade de propagação de uma onda pela sua frequência para que tenhamos o comprimento de onda:
L = V/f
Onde: L = comprimento de onda (metros)
V = velocidade de propagação (metros por segundo)
f = frequência (hertz)
Quanto maior for a frequência, menor será o comprimento de onda.
Levando em conta este fato, podemos perceber então porque os morcegos tem a necessidade de emitir sons tão agudos. Quanto mais alta for a frequência deste grito, menores serão os objetos que ele pode detectar.
Soltando morcegos em jaulas com obstáculos formados por grades de metal, conforme mostra a figura 5, pesquisadores americanos demonstraram que o objeto mínimo que o morcego pode perceber tem uma dimensão da ordem de 1/10 do comprimento de onda do som que ele emite, como mostrado na figura 5.
Com objetos abaixo dessas dimensões o sistema de orientação não "funciona" e as colisões se tornam mais frequentes.
Supondo uma frequência de 34 000 Hz (34 kHz), temos um comprimento de onda de 1 cm. Como 1/10 desse valor corresponde ao objeto mínimo que pode ser detectado, vemos que suas dimensões estão em torno de 1 mm.
Pequenos insetos, galhos de árvores e mesmo ramos finos, fios, etc. podem ser detectados com facilidade por um morcego que emprega esta frequência.
Enfim, o Sonar usado pelos morcegos consiste num sistema de orientação que possibilita a detecção de objetos pelo reflexo de ondas sonoras de altíssima frequência (ultra-sons).
O próprio morcego se encarrega de emitir esta onda de alta frequência sonora na forma de gritos ultra-sônicos e receber seu eco pelo seu aguçado sistema de audição.
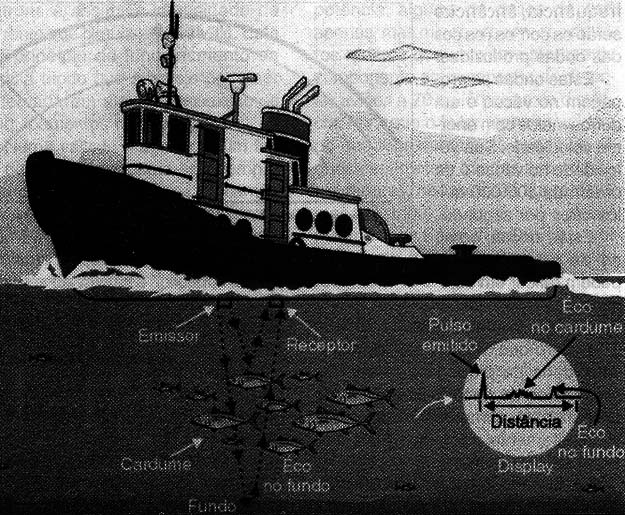
Sistema semelhante de Sonar é utilizado em embarcações, como mostra a figura 6. Este sistema pode tanto indicar a profundidade do local em que o barco está pelo tempo que o som demora para ir até o fundo e voltar, como também pode indicar a presença de cardumes de peixes.
As modernas embarcações de pesca localizam os peixes através de sistemas como este.
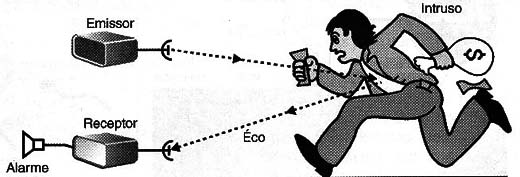
Em muitos ambientes podem ser usados sistemas de detecção de intrusos (alarmes) com o mesmo princípio de funcionamento, conforme mostra a figura 7.
O ultra-som está acima da capacidade de percepção de nosso ouvido, mas pode refletir em qualquer objeto que se encontra em seu caminho, desde que tenha dimensões mínimas para isso. O eco produzido pode ser detectado por sensíveis circuitos eletrônicos e com isso disparar alarmes.
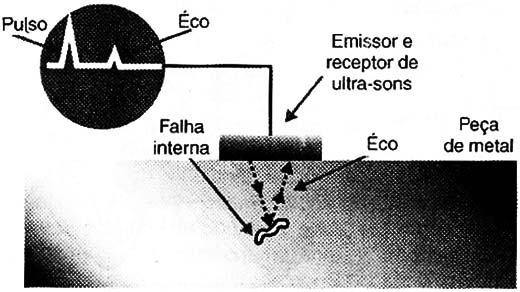
Uma aplicação industrial interessante do sonar por ultra-sons é na detecção de falhas de peças de metal. Um sinal de altíssima frequência é aplicado a uma peça, ocorrendo a produção de ecos se existirem falhas, como por exemplo rachaduras, bolhas de ar, etc. conforme mostra a figura 8.
A HISTÓRIA DO RADAR
A história do Radar está ligada à própria história da eletrônica, a partir do momento em que foram descobertas as ondas de rádio.
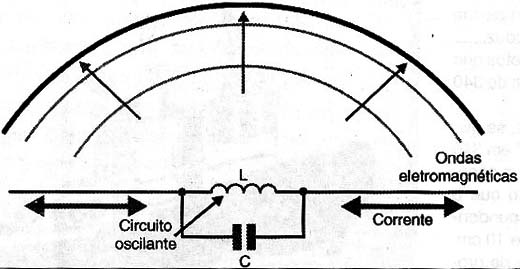
Se fizermos uma corrente ir e voltar rapidamente por um fio, haverá a produção de campos elétricos e magnéticos que alternando-se se propagarão pelo espaço na forma de uma onda eletromagnética.
Quanto mais rápido for o movimento da corrente, ou seja, sua frequência, menores serão os comprimentos das ondas produzidas.
Estas ondas se propagam no vácuo e em outros meios com enorme velocidade. Sua velocidade no vácuo é da ordem de 300 000 quilômetros por segundo.
Estas ondas, como as de som também podem refletir em objetos e é esta possibilidade que nos leva ao Radar.
É claro que, neste caso a velocidade de propagação sendo enorme, precisamos de frequências muito altas para obter comprimentos de onda suficientemente pequenos para detectar objetos comuns.
Se empregássemos uns 30 000 Hz, como no caso de um sonar, teríamos um comprimento de onda de 10 000 metros e isso dividido por 10 nos levaria a capacidade de detectar objetos cujas dimensões fossem no mínimo de 1 quilometro!
Na prática, as ondas devem ter frequências de pelo menos 300 MHz, o que nos leva a possibilidade de detectar objetos com dimensões mínimas da ordem de 10 cm. Frequências muito mais elevadas são entretanto empregadas pela maioria dos sistemas de Radar.
Mas, de onde vem o Radar?
O próprio Heirich Hertz, que descobriu as ondas de rádio sugeriu que elas poderiam ser usadas na detecção de objetos à distância.
Em seus experimentos ele havia verificado que as ondas de alta frequência produzidas em seu laboratório, numa frequência equivalente aos 500 MHz, refletiam em diversos tipos de objetos.
Sua "onda" tinha um comprimento da ordem de 60 cm mas isso foi suficiente para se ter a detecção experimental desse fenômeno de reflexão e verificação de sua possibilidade de uso.
Em 1903, um pesquisador dinamarquês chamado Christian Hueslmeyer fez experiências com a detecção de ondas de rádio que eram refletidas por grandes objetos, no caso, navios.
Marconi já dizia, na mesma época, que as ondas de rádio poderiam ser um dia usadas no auxílio à navegação mal suspeitando de que algum tempo depois elas seriam indispensáveis.
O grande problema inicial com que se defrontaram os projetistas dos primeiros Radares foi a produção de ondas com grande potência e a detecção de ecos muito fracos.
O primeiro desenvolvimento real que levou ao radar como conhecemos hoje foi devido ao trabalho de dois pesquisadores americanos: Gregory Bret e Merle Tuve que estavam preocupados em estudar a estrutura da alta atmosfera da terra incluindo a propagação de ondas de rádio e a detecção de tempestades.
Estes cientistas desenvolveram um método para enviar um pulso de curta duração de ondas de rádio a partir de um transmissor e depois receber um eventual éco.
Estudando o eco eles pensavam que poderiam detectar tempestades, determinar a distâncias em que se encontravam as altas camadas da atmosfera onde os sinais refletiam e muitas outras coisas.
Podemos perceber que, o que estes cientistas haviam desenvolvido já era um verdadeiro sistema de Radar: produzir ondas de rádio e emiti-las, esperando por um eco.
No entanto, por simples que pareça, as dificuldades técnicos para a época eram muitas e ainda são para os leitores que acham que seria muito simples montar um "Radar caseiro" com componentes comuns, mesmo levando em conta os avanços da eletrônica em termos de disponibilidade de componentes.
O primeiro problema a ser considerado é o referente a intensidade dos sinais ou potência das ondas que deveriam ser emitidas.
Conforme já explicamos, o comprimento de onda deve ser o menor possível, dentro de certos limites, o que implica em frequências muito altas, para podermos detectar objetos pequenos.
Por outro lado, a potência também precisa ser muito alta, para que seja possível ter num objeto pequeno, ou que esteja muito longe a reflexão de uma boa quantidade de energia, o suficiente para poder ser detectada pelo receptor.
Em suma, quanto maior a potência mais éco teremos e mais fácil será detectar um objeto, por mais longe e menor que esteja.
Nas fases iniciais do desenvolvimento do Radar não haviam dispositivos capazes de produzir ondas de rádio nas frequências desejadas, com potências razoáveis.
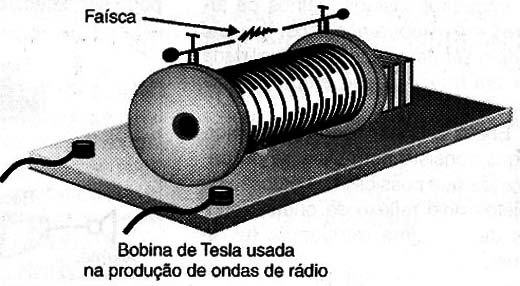
Hertz usava faíscas elétricas geradas por bobinas as quais produziam ondas em grande quantidade mas de forma descontrolada.
As válvulas termiônicas comuns ainda não estavam suficientemente desenvolvidas e mesmo que estivessem ainda enfrentavam sérias dificuldades para a produção de ondas em frequências muito elevadas.
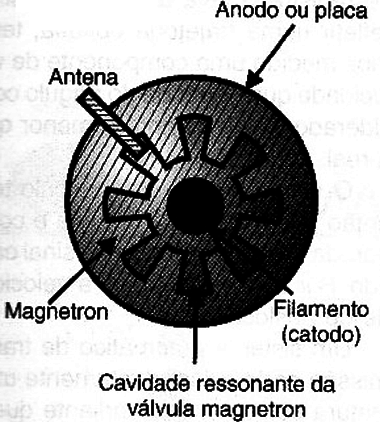
O primeiro dispositivo prático capaz de produzir sinais de altas frequências para aplicações num Radar foi a válvula Magnetron, criada em 1921.
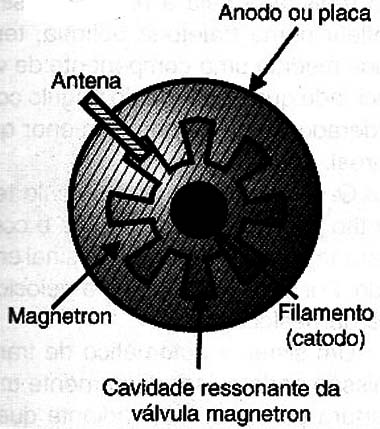
Numa válvula comum, os elétrons percorrem um caminho praticamente reto entre o catodo e o anodo, sendo controlados em sua quantidade por uma grade. Aplicando na grade um sinal, ele pode controlar o fluxo de elétrons e assim a intensidade da corrente que circula pela válvula. Este é o princípio de funcionamento da válvula triodo que até hoje pode ser observada em alguns transmissores e equipamentos mais antigos.
Numa válvula Magnetron, um feixe de elétrons espirala-se acompanhando as linhas de força do campo magnético de um imã. O movimento desses elétrons gera sinais de altíssima frequência que podem ser retirados da válvula e aplicados a uma antena. Estes sinais podem ser emitidos para uso no Radar ou podem até ser aplicados em alimentos para cozinhá-los como ocorre nos fornos modernos de micro-ondas. Na figura 10 temos um exemplo de aplicação num detector de radar.

As micro-ondas geradas pelas primeiras válvulas magnetron entretanto, não tinham inicialmente muita potência, alguns milésimos de watt apenas, mas mesmo assim os primeiros radares que usavam este tipo de componente eram capazes de detectar aviões a 70 quilômetros de distância.
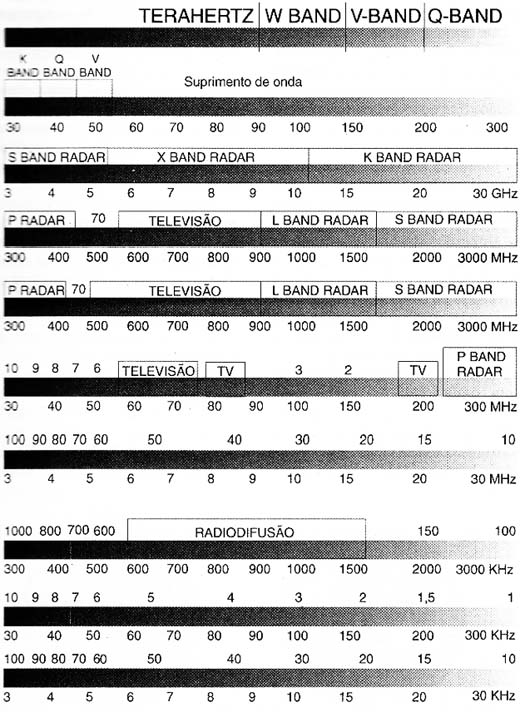
Para que o leitor tenha uma idéia do que representam as ondas de alguns centímetros usadas nos primeiros radares, na figura 6 damos a distribuição do espectro eletromagnético.
Esta distribuição por frequência mostra que as ondas de rádio têm usos bem definidos, justamente para que não ocorram problemas de interferências.
No extremo inferior da faixa temos as frequências mais baixas, medidas em quilohertz que são usadas em comunicações, radiodifusão, etc. No meio temos as ondas da faixa dos megahertz que são usadas em comunicações, serviços públicos e TV e já em torno dos 300 MHz temos as primeiras faixas usadas pelo Radar.
As diversas faixas de Radar, denominadas "Bandas" recebem letras para identificação.
Na faixa dos Gigahertz ou bilhões de hertz é que temos os mais modernos e potentes equipamentos de radar, com ondas da ordem de centímetros e potências de milhões de watts. Estas faixas, por corresponderem a comprimentos de onda muito pequenos são denominadas de "micro ondas".
Até 1935 só existiam três maneiras de se gerar sinais de altas frequências para aplicações em Radar: a válvula magnetron, a válvula osciladora de Barkhausen e o sistema de centelhas.
Os próprios sinais gerados eram conduzidos até a antena por um único sistema conhecido: os fios condutores de metal.
Mas, novos avanços vieram. Lord Rayleigh em 1897 havia dito que as ondas de rádio poderiam ser enviadas à distância por meio de "canalizações" ou "dutos", entretanto nunca ninguém havia comprovado isso devido justamente à dificuldade de se produzir ondas de rádio de frequências suficientemente altas para que os dutos pudessem ser finos a ponto de poderem ser experimentados num laboratório.
Foi somente entre 1936 e 1940 que o pesquisador Dr. Len Jen Chu, dos Estados Unidos, desenvolveu a teoria da "guia de onda", possibilitando assim a utilização prática das "canalizações" para a condução de sinais de rádio.
nesta mesma época, para ajudar, o Dr. Hansen em Stanford, provou que uma cavidade que tivesse uma dimensão correspondente ao comprimento de onda de uma determinada frequência, "ressonaria" nesta frequência, funcionando assim como uma espécie de oscilador, ou seja, um dispositivo capaz de produzir estas próprias ondas.
Dispositivos equivalentes como bobinas e capacitores não mais precisariam ser usados em circuitos geradores de sinais de rádio.
Partindo disso, em 1937 surgia o dispositivo que deu o maior avanço ao Radar: a válvula Klystron.
Esta válvula podia gerar sinais numa potência de 1 watt num comprimento de onda equivalente a 10 cm.
Com a aproximação da Segunda Grande Guerra, o radar teve sua maior aplicação na detecção de forças inimigas, além de possibilitar uma concentração gigantesca de cientistas no sentido de se obter um aperfeiçoamento do equipamento.
Os próprios alemães tentavam aperfeiçoar seu sistema, tendo inventado o tubo de raios catódicos (TRC), se bem que eles não tenham conseguido produzir micro ondas com boa intensidade, o suficiente para a detecção numa escala prática.
O tubo de raios catódicos, é usado como display ou "tela" para a maioria dos sistemas de Radar até hoje.
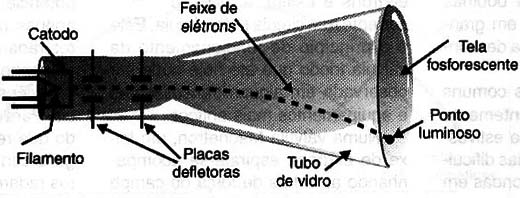
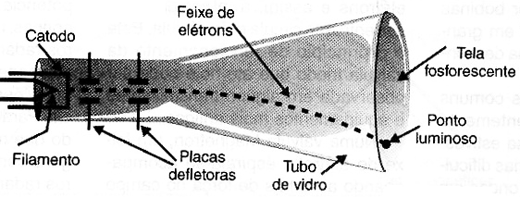
Ele consiste num tubo de vidro em que se faz vácuo colocando-se diversos elementos ou eletrodos em seu interior.
O catodo, colocado no "canhão" quando aquecido por um filamento de tungstênio "dispara" um feixe de elétrons que vai incidir numa tela coberta de fósforo produzindo no local um ponto luminoso.
Sinais elétricos aplicados nos demais elementos dirigem o feixe de elétrons produzindo assim imagens na tela, conforme mostra a figura 12.
Ligado a um sistema tradutor este tubo de raios catódicos pode projetar imagens (como numa TV) indicando a posição e distância dos objetos localizados pelo sistema.
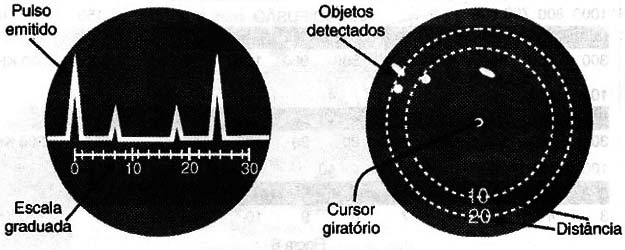
Na figura 13 mostramos alguns tipos de imagens que são produzidas pelos tubos de raios catódicos usados nos Radares.
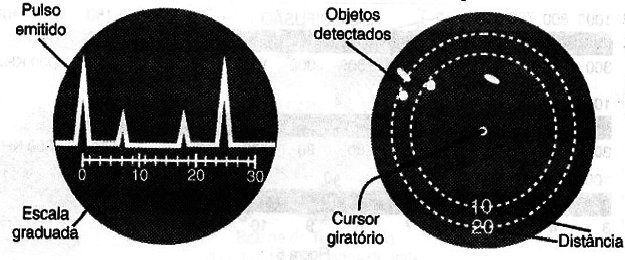
Pela posição dos pulsos que correspondem aos ecos, os quais formam regiões observáveis (claras) na tela, operadores experientes podem dizer onde está o objeto, se ele se move e em que direção. Alguns operadores podem até identificar determinados tipos de aeronaves pelo eco diferenciado que produzem!
Os alemães, mesmo com TRCs e sem válvulas potentes, já trabalhavam na idéia de fazer um Radar, baseados em informações que seus espiões no Japão, Estados Unidos e Inglaterra mandavam, mas não conseguiram avançar muito neste campo.
O avanço final ocorreu com o desenvolvimento da Válvula Magnetron de Cavidade Ressonante ou Sintonizada.
Um grupo de cientistas liderados por M. L. H. Oliphant, tomou o Magnetron comum e acrescentou uma série de cavidades ressonantes, ou seja, com dimensões de acordo com o comprimento da onda que deveria ser produzida.
O resultado dessa ressonância, ou seja, capacidade de oscilar numa frequência específica com maior facilidade, foi a produção de micro-ondas com uma potência muito mais alta. De fato, o primeiro magnetron de cavidade ressonante já foi capaz de produzir 10 000 watts de potência num comprimento de onda de 10 cm.
Se bem que nas aplicações de tais radares em pouco tempo se voltassem totalmente para o campo militar (detecção de aviões, navios, foguetes, etc) os experimentos iniciais foram feitos com a detecção de veículos em movimento com a observação de que "um dia seriam usados nas rodovias como eficientes auxiliares dos policiais".
Esta aplicação, em menor escala, do Radar talvez seja a que nos justamente a mais familiar hoje.
A partir do Magnetron de Cavidade Ressonante diversos novos componentes para micro-ondas foram criados, como por exemplo o diodo Gunn, mostrado na figura 15.

Este minúsculo componente eletrônico tanto pode ser usado para gerar micro-ondas como também detectá-las.
Usando um diodo Gunn como componente básico são montados os "detectores de radar", como o da figura 16, capaz de acusar a presença do sinal do Radar da polícia rodoviária antes que ele possa registrar sua velocidade.

Quando o sinal do Radar da polícia atinge seu sensor, um alerta é disparado dando tempo para que o motorista reduza sua velocidade, se estiver acima do limite, antes de entrar em seu campo de ação.
No Brasil, e mesmo em alguns estados americanos, o uso do detector de Radar é proibido.
COMO FUNCIONA O RADAR
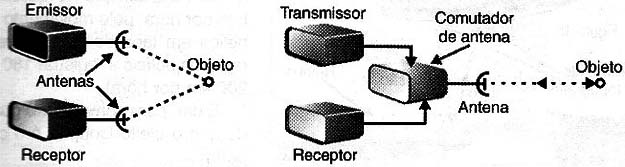
O sistema de Radar mais simples consiste num emissor de micro-ondas e num receptor capaz de captar os ecos de um possível objeto que entre em seu campo de ação, conforme mostra a figura 17.
O transmissor e o receptor podem usar antenas diferentes ou podem ser ligados a uma mesma antena.
O Radar de impulsos, por exemplo, emite pulsos de curta duração, esperando em seguida o eco que pode ser recebido pela mesma antena que enviou o sinal.
Num displaypodemos detectar exatamente a que distância se encontra o objeto, isso pela separação entre o pulso emitido e o eco.
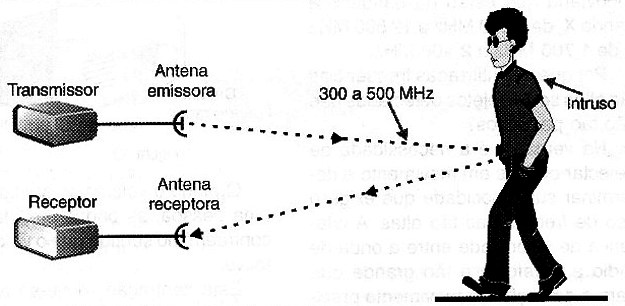
Outro tipo de Radar é o de onda contínua (continous wave ou CW) em que o transmissor fica permanentemente ligado. O receptor deve então utilizar uma segunda antena para captação do eco. Uma aplicação doméstica para o Radar CW é como detector de intrusos.
Um Radar deste tipo pode operar em frequências relativamente baixas, entre 300 e 500 MHz e com baixa potência.
As frequências utilizadas nos diversos sistemas de Radar são separadas em faixas ou bandas conforme mostra a figura 18.
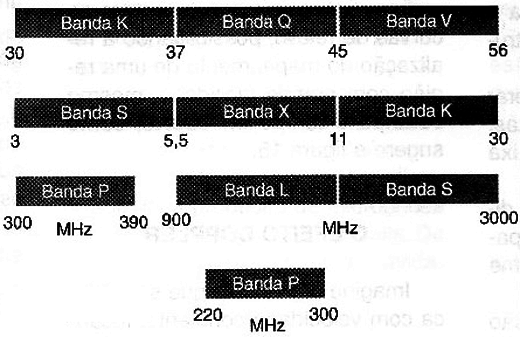
Veja que estas frequências são muito altas, como já explicamos, principalmente as utilizadas pela polícia rodoviária que estão na banda S e banda X, de 8 200 MHz a 12 500 MHz e de 1 700 MHz a 2 400 MHz.
Por que se utilizam frequências tão altas se os objetos detectados não são tão pequenos?
Na verdade, é a necessidade de se detectar objetos em movimento e determinar sua velocidade é que exige o uso de frequências tão altas. A diferença de velocidade entre a onda de rádio e o veículo é tão grande que para a detecção de movimento precisamos usar frequências elevadas.
Isso poderá ser melhor entendido quando explicarmos o que vem a ser o Efeito Doppler.
A escolha de uma determinada frequência para um sistema de Radar depende do se que pretende detectar.
Nuvens, por exemplo, podem absorver melhor certos comprimentos de onda e refletir outros. Assim, se pretendermos ter um radar meteorológico, para detectar tempestades ou formações de cúmulos-nimbos que podem dar origem a chuvas, devemos escolher comprimentos de onda que sejam refletidos por estas formações. Já, se quisermos detectar um avião ou outro objeto sólido entre as nuvens, precisamos escolher uma frequência diferente.
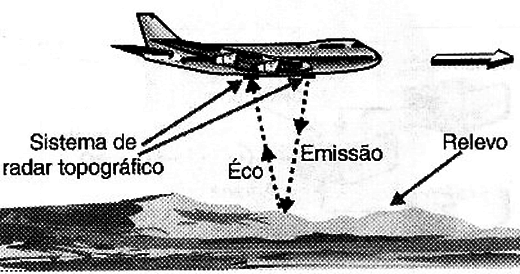
Temos também os sistemas de Radar que são usados para levantamento de relevo ou altimétricos que são levados por aviões. estes radares detectam as curvas de relevo, possibilitando a realização do mapeamento de uma região, com grande facilidade, mesmo estando o tempo encoberto, como sugere a figura 19.
O EFEITO DOPPLER
Imagine um veículo que se desloca com velocidade constante, tocando uma buzina ou uma sirene que emita um som de frequência fixa.
Quando o veículo se aproxima de uma pessoa, as ondas emitidas, "se contraem" no sentido que o veículo se move. Esta contração deve-se ao próprio deslocamento da fonte (ou de quem ouve) o que significa que elas chegam em maior quantidade por unidade de tempo ao ouvido da pessoa. O resultado final disso é que a pessoa passa a receber um som mais agudo ou de frequência maior que a originalmente emitida pela buzina ou sirene, conforme mostra a figura 20.
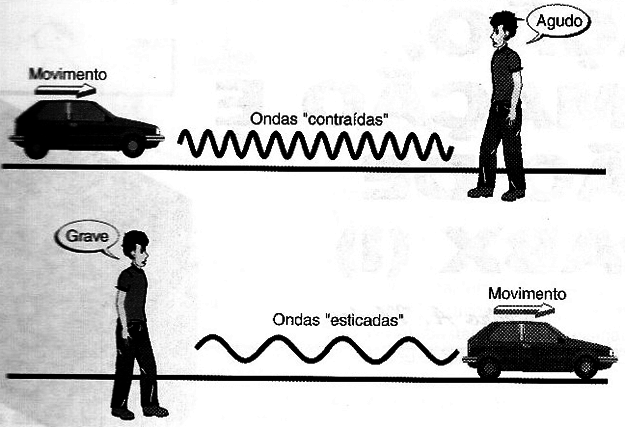
Quando o veículo se afasta, as ondas são "esticadas" na direção do movimento, ocupando assim um espaço maior (o espaço que devem percorrer mais o espaço dado pelo deslocamento do veiculo neste intervalo) chegando assim ao ouvido da pessoa em, menor quantidade. O som que esta pessoa ouve é portanto mais grave que o original (tem frequência mais baixa).
Estas alterações de tonalidade são muito bem percebidas quando uma ambulância com a sirene ligada, um trem apitando ou um veículo que buzina passa rapidamente diante de uma pessoa.
O importante é que esta alteração não se deve ao fato do som emitido sofrer modificações no emissor, pois o motorista do veículo não percebe qualquer alteração, mas sim devido ao fato da fonte emissora (veículo) estar em movimento em relação a fonte receptora (a pessoa movendo-se em relação à fonte também estará sujeita ao mesmo efeito).
Conhecendo a frequência do som alterado e do som original, além da velocidade de propagação do som no ar, podemos facilmente calcular a velocidade do veículo.
Em suma, este efeito denominado Doppler, em homenagem ao seu descobridor, consiste na alteração do comprimento de onda de uma emissão pelo fato da fonte emissora estar em movimento em relação ao receptor.
Veja que este efeito se aplica tanto às ondas sonoras como também às ondas eletromagnéticas como a luz.
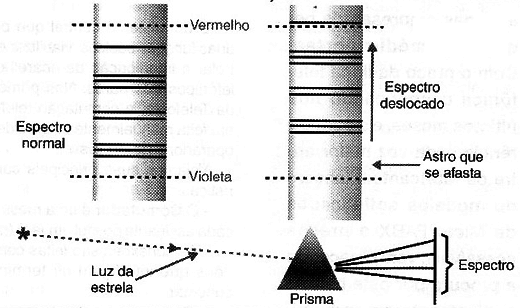
Os cientistas podem facilmente saber se um astro distante se aproxima ou se afasta da terra pela simples análise das alterações do comprimento da luz que eles emitem. Se o astro se afasta, a luz tende para comprimento de ondas maiores ou seja, "desvia-se para o vermelho". Se o astro se aproxima, sua luz tende a comprimentos de onda menores, ou seja, desvia para o azul ou violeta, o que é mostrado na figura 21.
Muitos cientistas, por exemplo, acreditam que o universo esteja em expansão com os corpos se afastando uns dos outros porque a maioria deles, quando analisados pela luz revela que ela tende para o vermelho.
Mas, o corpo não precisa emitir luz ou outra forma de radiação para que este efeito possa ser aplicado na detecção de seu movimento.
No caso das ondas de radio, ao emitirmos um sinal e ele refletir num corpo em movimento, o eco também terá sua frequência alterada em função deste movimento. Se o objeto se afastar sua frequência será diminuída e se ele se aproximar sua frequência será aumentada, conforme mostra a figura 22.
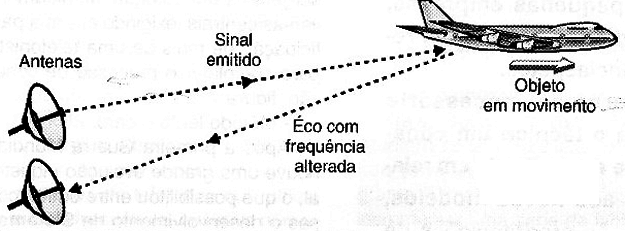
Neste caso, se conhecermos a velocidade de propagação das ondas de radio e a frequência de emissão, pela frequência do eco também podemos determinar a velocidade do objeto.
Num sistema sofisticado completo, o próprio equipamento já pode ter escalas graduadas em termos de velocidade e indo além, um sistema de disparo de alarme se a velocidade detectada superar um certo valor. O radar usado na detecção de velocidade de carros em rodovias opera segundo este princípio.
Numa posição estratégica na estrada, o sistema é montado, emitindo seus sinais de modo que atinjam o veículo de frente, pois o efeito exige que isso ocorra para que a velocidade registrada seja a real. Se o sinal refletir numa trajetória oblíqua, teremos medido uma componente de velocidade que depende do ângulo considerado e que sempre é menor que a real conforme mostra a figura 23.
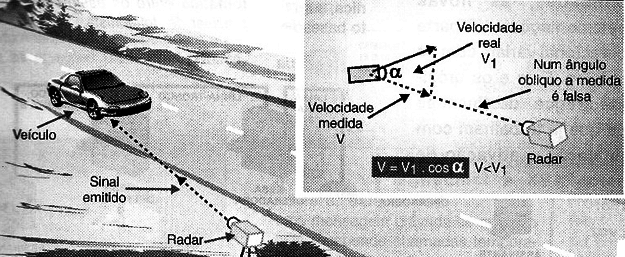
O sinal refletido pelo veículo tem então sua frequência medida e comparada com a frequência do sinal emitido. Por este valor temos a velocidade de deslocamento.
Um sistema automático de transmissão pode avisar diretamente uma viatura colocada mais adiante que o veículo detectado estava em excesso de velocidade sendo então interceptado.
A fórmula que permite determinar a velocidade do veículo é simples:
f = F x (c/(c +/- v))
Onde: f é a frequência do sinal recebido (Hz)
F é a frequência do sinal enviado (Hz)
c é a velocidade de propagação das ondas (300 000 000 m/s)
v é a velocidade do veículo
O sinal + ou - depende do fato do veículo se aproximar ou se afastar.
Veja que o uso de frequências muito altas se faz necessário pelo fato de c (velocidade das ondas) ser muito grande. Se usarmos um frequência baixa seria difícil detectar variações de seu valor.
Um fato que deve ser levado em conta é que existem fatores que podem afetar o desempenho de sistemas de radar, inclusive os usados para o controle de veículos.
A presença de um objeto oscilante na estrutura do veículo, por exemplo, como uma lâmina de metal ou hélice de metal pode introduzir reflexões que têm sua frequência alterada por uma velocidade virtual (a do veículo somada a rotação ou vibração).
Não seria excesso de imaginação dizer que um "velho calhambeque" que carregue um ventilador em sua carroceria a não mais do que 40 quilômetros por hora, pelo movimento da hélice em vista do vento, leve o radar da polícia a registrar 180 ou 200 km por hora! E, daí, para convencer o guarda que o efeito Doppler é o culpado...
O CONTROLE DO TRÁFEGO AÉREO
Toda movimentação de aviões em torno de um grande aeroporto é constantemente controlada por Radares.
Nas telas das salas de controle cada operador tem a posição instantânea de cada avião orientando-o no sentido de seguir rotas de descida, subida ou passagem sem o perigo de colisões.
Nas instalações militares, os radares também, vigiam o espaço aéreo nacional, detectando instantaneamente qualquer aeronave que se aproxime, pedindo sua identificação.
É claro que pesquisas intensas procuram meios de se fabricar um avião "invisível" para o Radar, se bem que algo muito próximo já tenha sido conseguido pelos americanos.
Normalmente, para cada aperfeiçoamento que se faz no sentido de tornar os sistemas de Radar mais eficientes, existem as contra medidas no sentido de tornar os aviões e foguetes de ataques invisíveis.
Durante a Segunda Grande Guerra, os aviões jogavam em sua rota grandes quantidades de limalha de metal, que refletem as ondas de radar dos alemães, que ainda não tinham um bom sistema de detecção, enganando-os completamente.
Atualmente, materiais especiais são pesquisados no sentido de refletir as ondas de radar, não na mesma direção de onde vêm, mas para direções diferentes, evitando assim a produção de ecos que possam causar a presença dos aviões.
Recobertos com estes materiais os aviões seriam invisíveis ao Radar, podendo facilmente ultrapassar as defesas de um inimigo.





