A detecção automática de veículos encontra uma enorme gama de aplicações em nossos dias. Controles de passagem de nível, drive through, sistemas de abertura automática de portas de garagens, detecção de velocidade e intensidade de tráfego, parquímetros são alguns exemplos onde sistemas capazes de detectar a presença de um veículo são importantes. Este artigo, baseado em Application Note da Honeywell mostra como sensores magneto-resistivos podem ser usados na detecção de veículos com eficiência, substituindo tecnologias antigas.
O sensoriamento automático de veículos tem despertado o interesse de muitos fabricantes de sensores, como a Honeywell, que desenvolveram técnicas para aplicar os sensores do tipo AMR (Anisotropic Magneto-Resistive) neste tipo de aplicação.
As características dos sensores do tipo ponte de Wheatstone permitem o desenvolvimento de circuitos eficientes, como procuraremos mostrar neste artigo.
O Princípio de Funcionamento
A presença de uma estrutura metálica como a de um carro, em princípio já mostra que podemos fazer sua detecção baseados em algo que envolva um campo magnético.
No entanto, os sensores de efeito Hall, que exigem campos intensos, não são os mais apropriados para este tipo de aplicação, pois os veículos não geram campos magnéticos (não são magnetizados).
Mas, se eles não podem ser usados, podemos empregar sensores de menor sensibilidade aproveitando uma solução dada pela própria natureza.
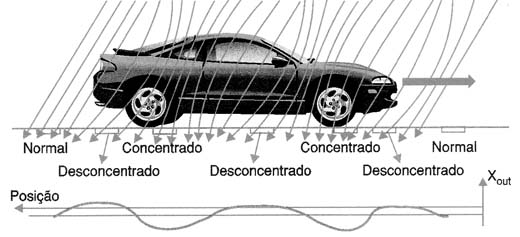
A terra possui um campo magnético que sofre uma deformação quando passa através de estruturas metálicas, como a de um carro. Podemos aproveitar essa deformação para usar detectores sensíveis, capazes de detectar campos tão fracos como meio gauss que é o campo da terra. A figura 1 mostra a deformação do campo magnético em torno de um veículo comum.

A passagem de um veículo nas proximidades de um sensor sensível provoca portanto alterações na intensidade do sinal, conforme as linhas do campo sejam mais ou menos concentradas.
Apesar de ocorrerem variações no sinal produzido na saída do sensor, em função da distância do veículo ou mesmo da presença de materiais magnéticos em seu interior, o fato é que sensores podem ser usados na detecção.
Os sensores
Os sensores de campo magnético podem ser encontrados em duas categorias: pontes magneto-resistivas e bobinas.
As bobinas tem a desvantagem de precisarem ser excitadas, normalmente por um oscilador, além do que são maiores.
Os sensores magneto-resistivos, por outro lado, estão disponíveis em dois tipos: AMR e GMR.
Os sensores AMR ou Anisotropic Magneto Resistive são direcionais e proporcionam uma resposta apenas em amplitude para os campos magnéticos no seu eixo sensível.
Para detectar campos em dois ou três eixos de orientação, pode-se combinar dois ou três desses sensores.
Os sensores GMR ou Giant Magneto-Resistive podem também ser usados para sensoriamento de campos magnéticos, mas possuem uma resposta maior a amplitude do campo, com pouca diretividade.
Para serem usados na detecção de veículos, esses sensores precisam de um campo magnético auxiliar, que tanto pode ser gerado por um imã permanente como por um solenóide alimentado por corrente contínua.
Sensores em Ponte de Wheatstone
Nos sensores AMR os elementos sensíveis internos são montados de modo a formar uma ponte de Wheatstone, conforme mostra a figura 2.

Nesse tipo de sensor cada um dos elementos tem uma resistência típica da ordem de 1 000 ?. No entanto, todos os elementos são casados com precisão, mantendo a ponte em equilíbrio perfeito na ausência de qualquer campo magnético.
Dependendo da orientação do campo magnético externo, enquanto um elemento tem sua resistência diminuída a do outro aumenta, causando assim um desequilíbrio da ponte.
Dessa maneira, na saída aparece uma tensão cujo valor depende tanto da intensidade do campo como da tensão de alimentação.
Para um campo de 0,5 gauss, por exemplo, com uma alimentação de 5 V, aparece uma tensão típica de saída da ordem 2,5012 na saída + e 2,4988 na saída .
Essa diferença de tensões pode ser aplicada a um amplificador externo para efeito de medida ou controle, já que se tratam de valores pequenos os obtidos com um campo típico, como o de 0,5 gauss que corresponde ao campo natural da terra.
Pode-se detectar as componentes vertical e horizontal de um campo, por exemplo, combinando sensores com orientações diferentes.
A Honeywell já fornece um componente, o HMC1022 que conta com dois sensores em ângulo reto justamente para essa aplicação, conforme mostra a figura 3.
Da mesma forma, num mesmo invólucro podem também ser instalados três sensores com orientações nos eixos X, Y e Z, dependendo da aplicação visada.

Circuitos
Conforme vimos, os sinais obtidos nas saídas dos sensores AMR são muito fracos, da ordem de milivolts. Isso significa que circuitos amplificadores de bom ganho devem ser usados para acusar a presença das pequenas deformações do campo causadas pela passagem de veículo.
A idéia básica adotada normalmente consiste num amplificador de instrumentação, com alimentações na faixa de 2,7 a 4,8 V, como o mostrado na figura 4.
Um ponto importante a ser considerado nesses circuito é que uma alimentação com baixa tensão também serve para evitar o aquecimento dos elementos resistivos dos sensores.

Deve-se considerar ainda que uma certa tensão de offset sempre existe já que os elementos do componente não são absolutamente casados.
Um problema que ocorre com os sensores é que a circulação constante de uma corrente pelos elementos da ponte tende a magnetizá-los.
Assim, é necessário um circuito de "degauss" (desmagnetização) ou "de-perm" para evitar a degradação do sensor, principalmente no caso dele ser exposto a um campo magnético mais intenso.
Essa desmagnetização é conseguida com a operação do circuito na forma pulsante com pulsos de corrente de polaridade invertida.
A ASSINATURA DO VEÍCULO
O campo magnético da terra é da ordem de 0,5 gauss. O posicionamento apropriado do sensor pode fazer com que esse campo varie entre 0 e 0,7 gauss na operação com a passagem de um veículo. A figura 5 mostra a "assinatura típica de um veículo.
As distâncias típicas de fixação do sensor variam entre 30 cm e 4 metros, caso em que temos densidades de fluxos que ficam entre 1 miligauss e 270 miligauss.
Velocidade e Sentido
O sentido do movimento de um veículo pode ser detectado facilmente pela polaridade do sinal gerado por sua passagem, conforme mostra a figura 6.
Observe que não é necessários usar dois sensores nessa aplicação. orientando convenientemente um sensor apenas, a fase do sinal gerado com a passagem do veículo muda com seu sentido.

Para a detecção da velocidade, mede-se a defasagem dos sinais gerados por dois sensores deslocados de distância conhecida conforme mostra a figura 7.

Circuitos Práticos
A Honeywell fornece em sua documentação técnica dois circuitos práticos para a detecção de veículos usando seus sensores.
O primeiro, mostrado na figura 8 faz uso de um amplificador operacional para instrumentação AD623, programado para operar com ganho 500 V/V.
Nesse circuito o potenciômetro R3 faz o ajuste de nulo possibilitando a obtenção de uma tensão de saída nula na ausência de deformação do campo gerado pela passagem de um veículo. Em outras palavras ele permite zerar o circuito em função da presença do campo magnético da terra.
O sinal desse amplificador é aplicado a um comparador de janela formado pelos circuitos integrados Lm393.
Para uma alimentação de 5 V, a janela do comparador é fixada por R8, R9 e R10 com centro de 2,5 V e abertura de +/- 25 mV.

Também é possível interfacear o circuito de detecção diretamente a um microcontrolador, como os da família PIC18XX, conforme mostra a figura 9.
Nesse caso, o amplificador de instrumentação é substituído por um amplificador diferencial que excita diretamente o conversor A/D de 10 bits do PIC.

Conclusão
Sensores de campos magnéticos sensíveis podem ser usados numa infinidade de projetos que envolvem a detecção de veículos.
Esses sensores podem pegar a "assinatura" magnética de um veículo em função disso determinar seu sentido de movimento, velocidade possibilitando assim a elaboração de sistemas de controle de tráfego de grande eficiência.
A Honeywell oferece uma ampla documentação sobre o assunto, a qual pode ser acessada em seu site em www.honeywell.com.